一种大工作空间近场扫描系统设计实现及电中心校准
2020-05-18闫丽萍
刘 浩,赵 远,闫丽萍,赵 翔*
(1.四川大学 电子信息学院,四川 成都 610065;2.成都信息工程大学,四川 成都 610225)
0 引言
随着高速集成电路和高频电路的迅猛发展,电路复杂度和时钟频率的不断提升带来了日益严重的电磁兼容问题。由于电磁兼容问题中普遍存在的复杂电路/几何/物理结构条件下的场-路混合、多尺度问题(建模与分析困难)以及知识产权(未公开电路内部结构)等原因,使用全波仿真技术进行电磁兼容分析常常会耗费巨大的计算代价亦或是无法进行建模[1]。因此,使用近场扫描系统,通过扫描待测设备(DUT)的辐射近场,从而明确每一个电子元器件乃至整个系统的电磁辐射特征[2-3],以此推导等效模型[4-5]的方法被运用到越来越多的电磁兼容研究当中,成为诊断和分析电磁兼容问题的有效方法[6-8]。
目前,最具代表性的近场扫描系统为加拿大EMSCAN研制的EMSCAN系统和瑞典DetectusAB公司推出的EMC-Scanners系统。其中,EMSCAN系统是由1 218个小型磁场探头组成的探头阵列,工作空间为316 mm×218 mm,空间分辨率为7.5 mm,具有实时连续扫描、捕捉瞬态电磁干扰的优点,但其价格昂贵,且探头固定,无法根据需求进行更换;EMC-Scanners为单探头逐点扫描系统,其工作空间为300 mm×200 mm×100 mm,最小步进间隔1 mm,可扩展性差且同样价格昂贵。因此,本文设计并实现了一套工作空间为600 mm×700 mm×600 mm,最小步进间隔0.05 mm,可扩展性强,能进行频域测量且价格适中的电磁近场扫描系统。该系统以计算机为核心,通过串口连接的方式控制三轴运动平台按照预先设置的扫描范围、路径及步长运动。通过LAN口连接的方式控制矢量网络分析仪,读取仪器探测的数据并将其传输到计算机中存储。经过校准后,系统可检测DUT的近场磁场特性,定位辐射源。
1 系统硬件设计
整个系统的硬件主要由机械传动单元(支撑平台、机械运动平台)、信号单元(近场探头、矢量网络分析仪)和计算机单元3部分组成,系统结构如图1所示。在进行频域测量时,信号单元启用矢量网络分析仪(VNA)Agilent E8363C的1端口提供输出信号给DUT,2端口接收输入信号。计算机单元通过串口控制机械传动单元运动到指定位置后,等待探头进行测量。在探头完成单点测量后,信号单元将测量数据通过网线传输到计算机单元中存储。之后,机械传动单元在计算机单元的控制下移动到下一个位置,再次进行测量。如此循环直到遍历完所有测量点。

图1 近场扫描系统结构Fig.1 Structure diagram of the near-field scanning system
2 系统软件设计
本文基于虚拟仪器平台LabVIEW开发了一套控制系统[9]。在该平台下编写的近场扫描系统的前面板软件界面如图2所示。

图2 近场扫描系统的前面板Fig.2 Front panel of the near-field scanning system
近场扫描系统程序框图如图3所示。

图3 近场扫描系统程序框图Fig.3 Program flow chart of the near field scanning system
通过图3所示的连线实现程序的运行逻辑,再通过图2所示的前面板选择扫描的起始位置、扫描范围、扫描步长及扫描速度等;选择启用相应的仪器,设置相应的采集频率及采集点数。点击运行按钮开始数据采集,并将采集回的信号传递给计算机单元,生成以当前程序开始运行时间为名的文本文档储存。当扫描完设定范围后,机械传动单元按照预先的设置返回零点。停止按钮实现紧急停止功能,按钮被按下后,程序停止运作,机械传动单元停止运动。
利用虚拟仪器软件结构实现与仪器的连通,基于可编程仪器标准命令对仪器进行控制,实现了对VNA测量状态以及测量数据的读取。通过调用动态链接库实现了对三轴运动装置的控制,使运动控制装置在根据接收到的三维空间坐标进行运动的同时,反馈自身的运动状态,从而能够根据扫描需求进行多平面蛇形运动[10]及指定步长运动。
在进行近场扫描过程中,要保证程序的鲁棒性,尤其是发生错误时对其进行定位排查的能力,同时也要保证设备运行的安全性,确保DUT和探头不会因为操作者的错误设置而受到损坏。因此本文对每一个子虚拟仪器进行了错误处理设计,以保证发生错误时,能根据错误代码和错误提示迅速定位到错误的发生点;设计了对位置信息的负反馈,以确保扫描位置时刻处于工作空间内;设置了紧急停止指令,以保证当程序未能检查到的错误发生时,操作者能迅速手动中止一切机械动作。
3 探头因子的校准
在进行近场扫描的过程中,探头检测出的是传感器耦合的输出电压,而不是等效建模所需的场值实际大小,因此定义探头因子PF用于测得磁场的校准:
(1)
式中,U(f)为探头测得的电压信号(单位:V);H(f)为探头所在位置处的磁场强度值(单位:A/m)。通过PF可以实现从电压信号到磁场强度信息的转换。PF值只与测量系统本身有关,与DUT无关。
为获得PF值,以特征阻抗为50 Ω的微带线作为校准件[11]。根据本文系统的测量原理,将U(f)取值为VNA测得的正向电压传输系数模值|S21|,即校准件的激励电压信号强度为1 V时探头测得的电压值;H(f)取为全波仿真软件计算得到的校准件在同样激励条件下探头位置处的磁场强度(对应分量)大小。
校准时探头的校准路径(虚线)如图4所示。
压汞孔隙分析是目前测量孔隙分布的经典方法,适合测试干燥试样的孔隙分布。初始压实状态下的试样孔隙分布特征如图6所示。

图4 校准时探头的校准路径(虚线)Fig.4 Calibration path of probe
校准时,磁场探头位于微带线PCB板上方,使探头按照如图4中虚线所示校准路径扫过校准件,测得校准件在X方向磁场对应的输出电平。为排除扫描时环境噪声对测量的影响,通过增大VNA端口的输入功率、降低中频带宽以及控制测量高度的方式保证测量时其有用信号大于环境噪声20 dB。
磁场探头所测得结果取决于探头线圈所包围区域的磁场均值,而不是一个确定位置的场值。把测得的场强数据应用到等效建模的过程中,需要测得的场值对应一个确定的空间位置。为此,假定探头所测得的场值数据对应一个确定的空间点且该点的仿真数据与得到的测量数据匹配度最高,称该点为探头的电中心(Electrical Center,EC)。值得注意的是,EC位置与探头线圈的几何中心(Geometric Center,GC)不一定重合[12],如图5所示。
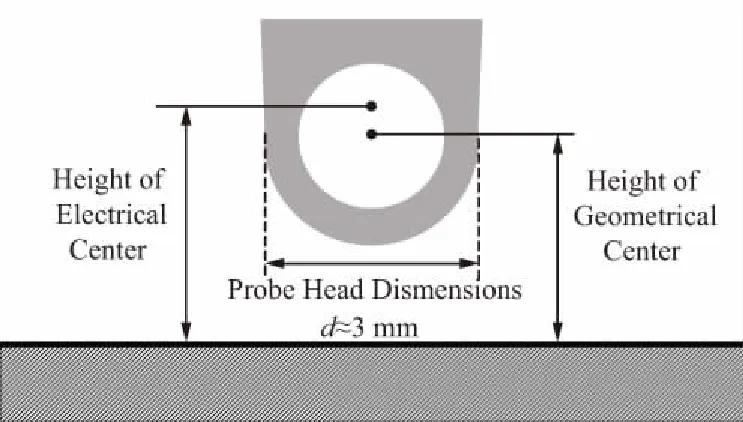
图5 探头电中心和几何中心示意Fig.5 Schematic diagram of probe electrical center and geometric center
图6为校准件近场辐射的理论Hx分量和扫描测量重建的重建Hx分量,包括在921 MHz时,校准路径上GC高度为3 mm的测量数据及其对应的一系列EC高度从1.5~4.5 mm的仿真数据。做图时,对每组数据分别进行以其最大值做归一化并取对数处理。

图6 在校准路径上不同高度的X方向磁场强度Fig.6 Hx component at different heights on calibration paths
为了确定EC的具体位置,文献[13]提出了一种基于相关系数的校准方法:
(2)
式中,xi为测量数据;yi为仿真数据;Rxy为该组测量数据与该组仿真数据的相关系数。利用该方法计算出在921 MHz、GC高度为3 mm时对应的EC高度为3.2 mm,其X方向磁场强度如图7所示。
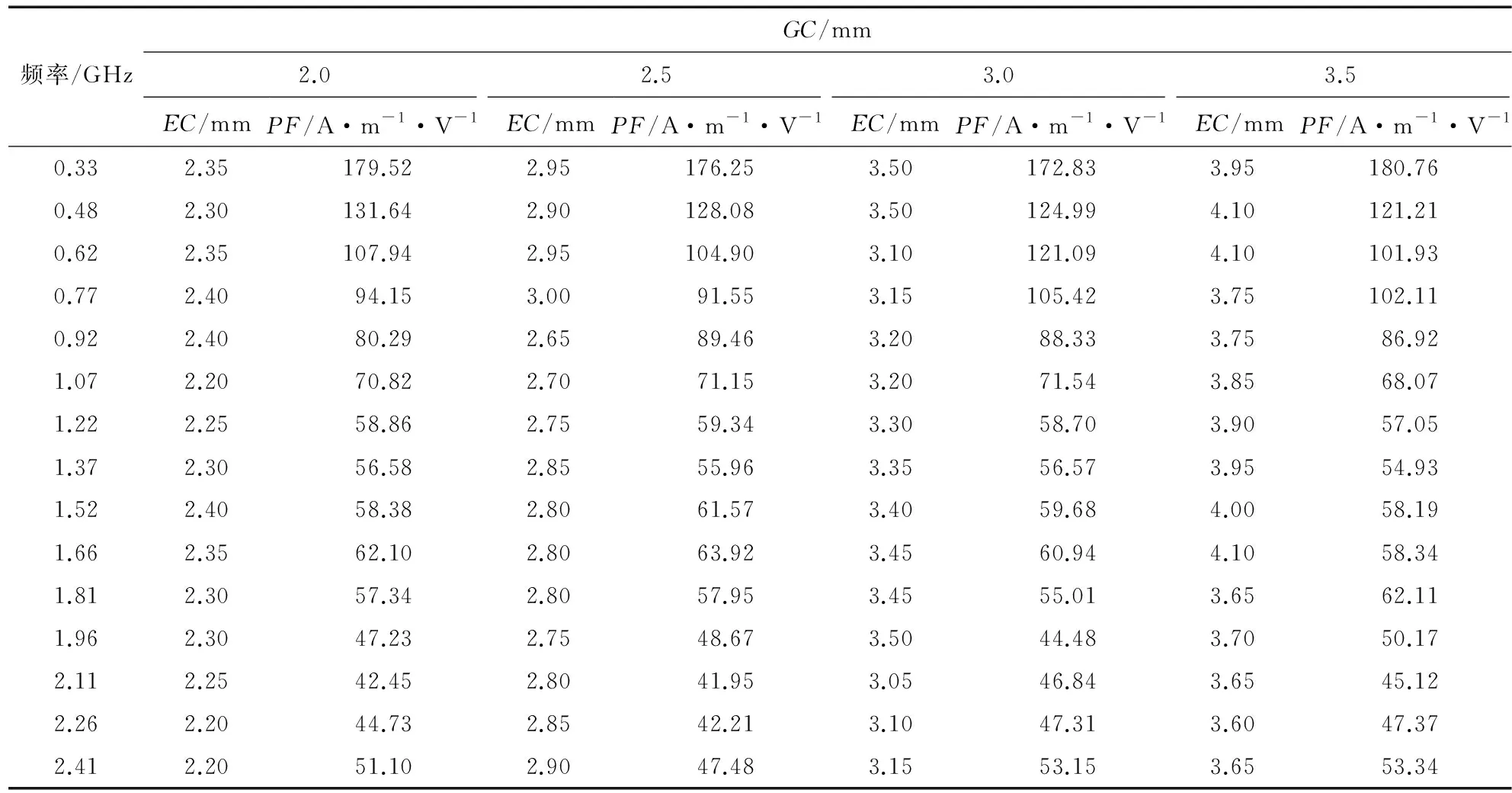
为检验该方法得到的EC位置是否具有普适性,本文对不同GC高度、不同频率的EC进行了测定和计算,结果如表1所示。在选取2.0,2.5,3.0,3.5 mm四个不同的GC高度时,其对应EC的PF具有一定差异。当选定同一EC时,不同频率下,其EC和GC的偏差不完全相同;当选定同一频率时,不同EC下,其EC和GC的偏差也不完全相同。由此说明,当测量高度或测量频率发生变化时,EC也会随之变化。因此,在进行近场扫描时面对不同的测量高度和不同的测量频率,均应先计算其EC,再根据选取的EC通过式(1)计算PF。
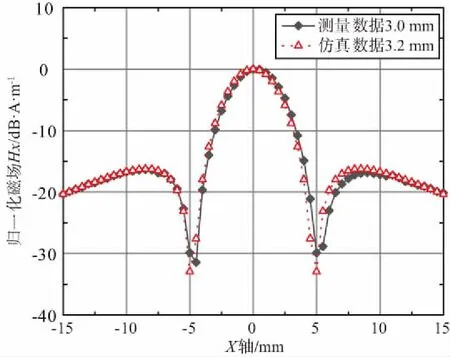
图7 与校准路径上X方向磁场强度的测量数据为最佳匹配的仿真数据Fig.7 Measurement data and simulation data for Hx component on calibration paths-in best correlation case
表1 不同频率不同GC下对应的EC及其PF
Tab.1 CorrespondingECand itsPFat different frequencies andGC
频率/GHzGC/mm2.02.53.03.5EC/mmPF/A·m-1·V-1EC/mmPF/A·m-1·V-1EC/mmPF/A·m-1·V-1EC/mmPF/A·m-1·V-10.332.35179.522.95176.253.50172.833.95180.760.482.30131.642.90128.083.50124.994.10121.210.622.35107.942.95104.903.10121.094.10101.930.772.4094.153.0091.553.15105.423.75102.110.922.4080.292.6589.463.2088.333.7586.921.072.2070.822.7071.153.2071.543.8568.071.222.2558.862.7559.343.3058.703.9057.051.372.3056.582.8555.963.3556.573.9554.931.522.4058.382.8061.573.4059.684.0058.191.662.3562.102.8063.923.4560.944.1058.341.812.3057.342.8057.953.4555.013.6562.111.962.3047.232.7548.673.5044.483.7050.172.112.2542.452.8041.953.0546.843.6545.122.262.2044.732.8542.213.1047.313.6047.372.412.2051.102.9047.483.1553.153.6553.34
4 测试结果及分析
为验证近场扫描系统的可行性和探头因子的准确性,对某DUT进行了频域近场磁场扫描,其主体是尺寸为80 mm×50 mm×1.5 mm,材质为FR4的PCB板;板的一面有如图8所示的微带线,另一面为接地面。激励端连接VNA作为其输入信号,2个负载端分别连接50 Ω的匹配负载。DUT的照片如图9所示。按文献[14-15]的频域测量建议,设置扫描高度,即探头GC据DUT的距离为3 mm,扫描步长1 mm,扫描范围80 mm×50 mm。

图8 DUT示意(单位:mm)Fig.8 Schematic diagram of the DUT with several microstrips(unit:mm)
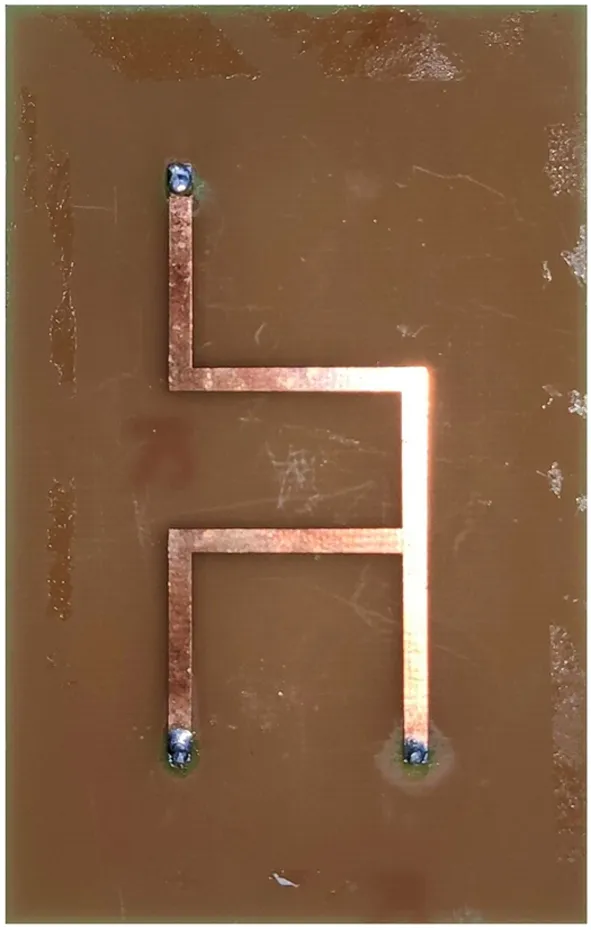
图9 DUT实物Fig.9 Photograph of the DUT
利用PF,将近场探头得到的电压信号转换为场强的绝对值,获得磁场强度分量近场分布图。本文以921 MHz频点为例,给出其测量数据如图10和图12所示以及仿真数据如所图11和图13示。可以看出,测量数据和仿真数据有很好的一致性,在总体上能反映DUT的近场磁场信息。
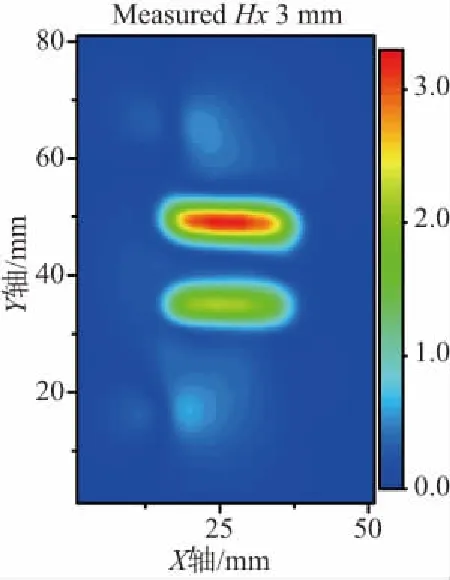
图10 921 MHz频点的测量Hx分布Fig.10 Measured Hx eld mapping at 921 MHz
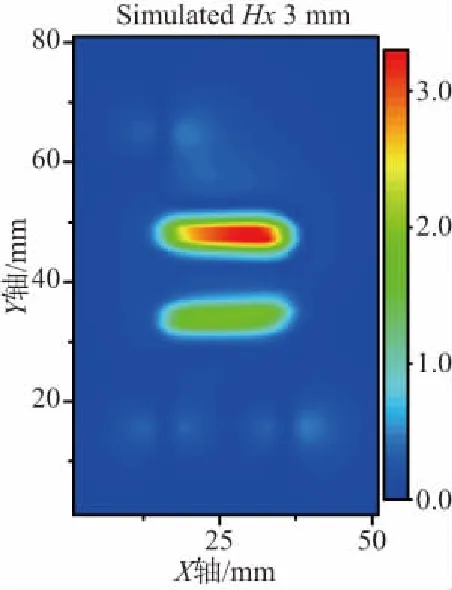
图11 921 MHz频点的仿真Hx分布Fig.11 Simulated Hx eld mapping at 921 MHz

图12 921 MHz频点的测量Hy分布Fig.12 Measured Hy eld mapping at 921 MHz
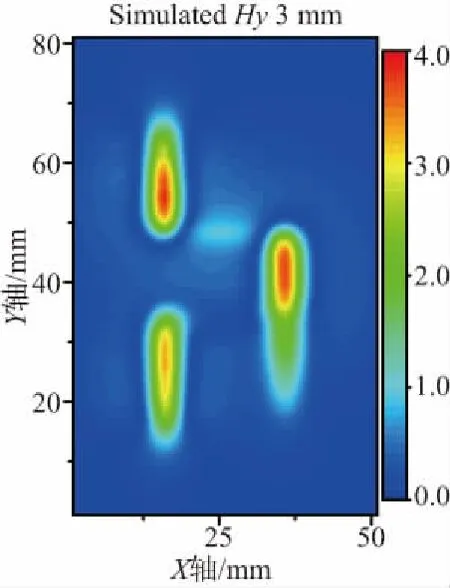
图13 921 MHz频点的仿真Hy分布Fig.13 Simulated Hy eld mapping at 921 MHz
5 结束语
本文设计并实现了一种电磁兼容近场扫描系统,通过计算机对VNA、机械运动平台进行联动控制,实现了对DUT的近场磁场扫描功能。用户可自定义扫描步长和三维扫描范围,根据DUT进行调整以平衡扫描的准确性和扫描效率。对不同高度、不同频率下的EC和PF进行了测定,提出在测量频率或测量高度发生变化时应重新测定和计算探头EC及PF的建议。实验结果和仿真结果良好的一致性验证了本文近场扫描系统的准确性。
系统还具有良好的可扩展性,如进一步开发运动控制系统使其可根据场强变化做自适应步长运动以减少扫描时间,将VNA更换为示波器等其他设备实现时域测量以及其他更多类型的测量,利用其工作空间达到600 mm×700 mm×600 mm的特性,对中小型腔体通过孔缝外泄的辐射近场进行测量。
