弹药运输车恒稳控制系统的设计
2020-05-18张小明王坤坤于纪言
张小明,王坤坤,于纪言
(1.南京理工大学 机械工程学院, 南京 210094; 2.河海大学 能源与电气学院, 南京 211100)
目前我国弹药近距离运输主要依靠人工或其他简易载具,大到中型口径火炮小到各种口径的枪械弹药,从弹药库或临时存放处运送到用药点的距离一般都很近,而在地形环境较为复杂的情况下,由人力推车近距离的运送弹药不可避免的会造成弹体之间的摩擦碰撞甚至倾斜坠地,为了安全起见应该极力避免这种情况的发生,尽管目前在弹药箱内会填充适量柔软填充物,但在路面较为复杂的情况下,碰撞仍然不可避免。我国目前在近距离弹药运输方面的研究应用较少,基本没有可以保证弹药近距离安全可靠运输的载具投入实战应用,在相关领域针对防抖恒稳平台出现了几种不同的控制方法,文献[1]设计了微粒群算法优化参数的模糊滑模控制算法,并针对强摩擦力矩进行了算法改进,其稳定平台的水平随动跟踪精度达到10-5rad,但其重力传感器易受干扰,不易运用于复杂工况。文献[2]针对连续非线性系统的未建模动态和有界干扰问题,设计了基于自适应模糊滑模控制的电动液压伺服水平防抖机构,其环境适应性强,鲁棒性强,但控制精度不高,不适用于跟随性要求较高的场合。文献[3]针对车载云台提出了前馈校正和主动阻尼防抖两种控制策略,经验证可以有效地降低系统的冲击度,提升平顺性,但其控制精度较低,只能起到减缓振荡的作用。
本研究基于模糊自适应参数整定的PID控制算法设计了近距离恒稳弹药运输车,不管小车行走的路况如何,弹药在运输平台上始终能够保持水平放置,最大程度的减少弹体之间的碰撞摩擦,保证弹药的安全运送。
1 恒稳弹药运输车数学模型
恒稳弹药运输车由运输车体、舵机、电位计、支杆、弹药舱和水平仪组成,其中舵机与运输车体固联,用于驱动支杆在竖直平面内摆动;电位计与舵机同轴,且可与电机同轴转动,用于测量支杆在竖直平面内的位置,不同的角度对应不同的电位计测量值;支杆联接在电位计轴上,同理可同轴在竖直平面内转动;弹药舱与支杆另一端固联,用于摆放弹药;水平仪与弹药舱周边固联,可保持弹药在药仓内水平位置始终不变,其结构如图1所示。
图1 恒稳弹药运输车结构示意图
其中弹药舱内用于放置弹药的水平仪的具体局部结构如图2所示。
图2 弹药舱内水平仪结构示意图
其中竖直支杆的长度为L,摆杆质心到电位器旋转轴中心的距离为L′=L/2,支杆相对于平面坐标系竖直y轴正方向的角位移为θ。当支杆与竖直y轴正向之间存在夹角即θ不为0时,忽略各部件之间的摩擦,对支杆进行受力分析,如图3所示。
其中:支杆的质量为m;弹药舱及弹药的总质量为M;舵机施加在支杆底端的扭矩为T;电位器旋转轴对支杆的支撑力为N;则对支杆的受力分析为:
∑Fy=0 :
N=(m+M)g
(1)
∑T=0:

(2)
由式(1)和式(2)可得支杆的运动方程为:
(3)
2 弹药运输车恒稳控制系统设计
弹药运输车恒稳控制系统采用PID算法结构,控制过程中由于电机频繁换向,示波器显示电流在换向处存在一段高频振荡。由于控制电路板地线、3.3 V电源线和晶振的布局,也导致控制信号存在不规律高频振荡。从以往研究得出一阶低通滤波器针对高频振荡有很好的滤除效果。为了解决在控制过程中存在的振荡问题,针对性的在角度控制的程序中加入一阶低通滤波环节,结合模糊自适应参数整定使控制器在工况复杂的情况下实时调整控制参数,提升其跟随性和抗干扰能力。
2.1 PID控制器的设计
弹药恒稳运输车的支杆控制系统是一种非线性、不稳定、鲁棒性较差的典型控制对象,为了使支杆一直稳定在目标的竖直位置,要将支杆相对于y轴正向的角位移θ作为被控量,将θ与目标位置的偏差代入PID控制表达式中进行计算,其中经典的PID控制模型为:
(4)
式中:u为控制器输出;e为期望值与实际输出的偏差;kp为比例系数;ki为积分系数;kd为微分系数。根据功能要求,最终设计出PID控制框图如图4。
图4 直立PID控制框图
电位器测得的支杆的实际位置与设定的目标位置之间的差值作为PID控制器的输入,控制器的输出作为整个系统的输出。此处采用包含比例和微分环节的位置式表达式来达到控制要求。
2.2 一阶低通滤波算法原理
一阶低通滤波也称作一节惯性滤波,通常是用C语言编程来实现普通硬件RC低通滤波器的滤波功能,在特定频率的目标信号的基础上滤除高频的干扰信号,干扰信号的频率越高滤波作用越明显,具有操作简单便于工程实现的优点[4]。
一阶低通滤波的算法公式为:
p(n)=c·q(n)+(1-c)·p(n-1)
(5)
式中:c为滤波系数;q(n)为本次采样值;p(n-1)为上次滤波输出值;p(n)为本次滤波输出值。一阶低通滤波采用本次采样值与上次滤波输出值进行加权,得到有效滤波值,使得输出对输入有反馈作用。
在直立角度控制代码中加入中一阶低通滤波,结合上述支杆直立角度控制部分程序其最终的代码实现如下:
int balance(float Angle)
{
float Bias;
static float Last_Bias,D_Bias,Least;
int PWM;
Least =Angle-Y;
Bias *=0.8f;
Bias+= Least*0.2f;
D_Bias=Bias-Last_Bias;
PWM =Balance_KP*Bias+D_Bias*Balance_KD;
Last_Bias=Bias;
return PWM;
}
其中Y为支杆处于目标位置时与y轴正方向重合时电位器的数据,Angle为支杆处于任意位置时电位器的数据,Bias 为本次误差,Last_Bias为上次误差,D_Bias为误差微分,Balance_KP为比例控制系数,Balance_KD为微分控制系数。
式中PWM即为最终由控制器芯片相对应的引脚输出到舵机的控制信号,PWM是脉冲宽度调制的英文缩写,它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术[5],通过调节占空比的变化来调节信号、能量的变化,舵机由PWM信号进行控制,脉冲的参数有最大值、最小值和频率。
2.3 模糊自适应PID控制
传统PID控制器的3个控制参数不能根据工况的变化做出实时调整,因此在传统PID控制器的基础上加入模糊自适应控制算法,提高整个控制系统的精确性,以达到使系统在动态过渡过程中系统超调量减小、调节速度加快等目的[6]。模糊自适应控制是将被控量按照人的思维方式和推理习惯进行模糊化处理,根据专家知识库,应用各种推理方法得到最终满足控制要求的控制量[7],模糊控制系统的核心是模糊逻辑控制器,模糊自适应参数整定PID控制器的结构如图5所示[8]。
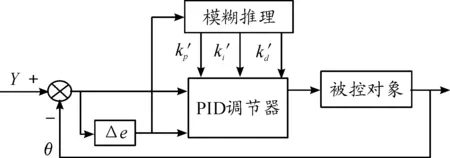
图5 模糊自适应PID控制器结构框图
(6)
此处根据e与Δe的取值,将参数整定分为以下4种情况:
1) 当|e|较大时,为使系统有较好的跟踪性能,应取较大的kp、较小的kd,同时为了避免系统响应出现较大的超调量,必须限制积分作用,可取ki=0;
2) 当e*Δe>0时,此时|e|朝着增大的方向变化。若e较大,此时可让控制器实施较强的控制作用,因此取较大的kp,较小的ki,kd取值不宜太大; 若|e|较小, 可让控制器实施一般的控制作用,只要扭转e的变化趋势, 使|e|朝着减小的方向变化;
3) 当e*Δe<0或者e=0时,说明|e|朝着减小的方向变化,或者已达到平衡的状态,此时不调整控制器参数,保持控制器输出不变;
4) 当e*Δe=0,e≠0 时,表明系统的曲线与理论曲线平行或一致。为使系统具有良好的稳态性能,应取较大的kp和ki值, 同时为了避免设定值振荡,以及提高系统的抗干性能,适当选取kd值[11];
表的模糊控制推理表
表的模糊控制推理表
表的模糊控制推理表
3 实验测试
为了验证模糊自适应参数整定PID控制器的控制性能,首先在Matlab中的Simulink里分别搭建传统PID控制器与模糊自适应参数整定PID控制器的数学模型,对两种控制器输入相同的单位阶跃信号,并在50ms的位置给予二者相同的扰动,用以模拟路况干扰,通过对响应曲线特性的分析,比较两者的优劣。
传统PID控制器的控制参数主要根据当前响应曲线的响应状态结合调试经验手动调试从而使控制器达到最佳响应状态。模糊自适应参数整定PID控制器实时跟随输入量e和Δe,利用模糊隶属函数按照模糊参数整定规则得出可使响应始终保持在最佳状态时的控制参数。两种控制器的阶跃信号扰动响应曲线如图6所示。
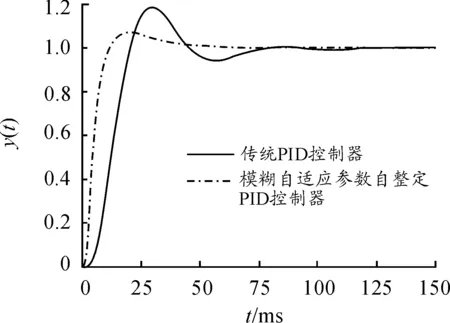
图6 两种控制器阶跃信号扰动响应曲线
通过分析两者的阶跃相应曲线,可以得出后者的响应速度快于前者约50%,超调量降低约70%,稳态误差降低约10%,后者在50 ms扰动位置处基本保持稳定,抗干扰能力显著提高,保证了恒稳弹药运输车的可靠性和安全性。
为了验证一阶滤波控制器在样机实物中的作用效果,在样机的支杆中间位置接高精度位移传感器的应变片,让样机保持在水平无颠簸路面行走,分别对未加滤波和加了一阶低通滤波的控制器进行实验,其振荡幅度曲线如图7所示。
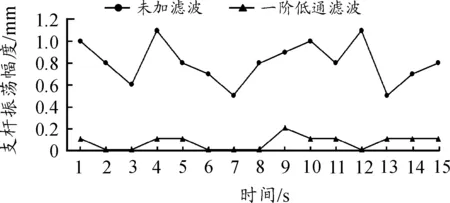
图7 一阶低通滤波作用效果曲线
通过与未加一阶低通滤波控制器的测试数据相比,加了一阶低通滤波控制器的样机在运行过程中支杆振动幅度总体缩小为原来的十分之一,实测削减振荡作用效果明显。
为了测试模糊适应参数整定PID控制方法在样机实物让的控制效果,用直径1~100 cm大小不等的若干石块模拟复杂颠簸路况,在弹药恒稳运输车的电位器上连接串口发送模块,在PC上实时记录电位器的角度响应情况。实际测得两种控制算法的角度响应曲线图如图8所示。
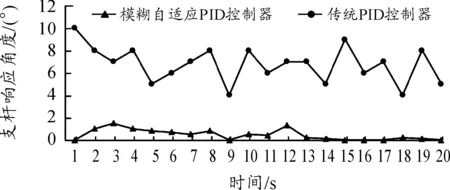
图8 电位器角度响应曲线
通过对实测数据分析可知,与传统PID控制器相比,模糊适应参数整定PID控制器在复杂的路况下可以使支杆在角度出现极小的偏差下就进行恢复控制,角度响应迅速,控制系统实时性好。
4 结论
通过对比分析传统PID控制器和模糊自适应参数整定PID控制器的阶跃响应图,可得出:
1) 后者的响应速度快于前者约50%,超调量降低约70%,稳态误差降低约10%。
2) 在50 ms扰动位置处,后者相较于前者来说基本无波动,100 ms以后传统PID控制器出现了周期性系统振荡。通过样机实测可得出:
1) 模糊自适应参数整定PID控制器中加入的一阶低通滤波算法可以将系统运行振荡减小一个数量级,使弹药恒稳运输车运行平稳基本无振荡。
2) 在复杂路况下,模糊自适应参数整定PID控制器能够保持很高的角度响应速度,很大程度上提高了系统的稳定性。因此,在弹药恒稳运输车上运用模糊自适应参数整定PID控制器可以满足稳定性和快速性的控制要求,鲁棒性提高,保证了恒稳弹药运输车的可靠性和安全性。