悬臂式双回转智能立体车库创新设计研究
2020-05-13王亮何坤王新锋曹明明毛昱昆
王亮,何坤,王新锋,曹明明,毛昱昆
(中煤科工集团西安研究院有限公司,陕西 西安 710077)
机械式立体车库是通过搬运、提升、回转等机械装置或设备系统,采用机械方法存取、停放车辆的特种设备停车库。机械式立体车库的组成主要包括钢结构框架、载车板、升降装置、传动装置、回转装置、安防系统和电气控制系统等。近几年来,随着科技水平的飞速发展,在已有的立体车库设备基础上,结合机械、电子、光学、计算机和信息技术等领域的先进技术,国内外发展了技术创新的智能立体车库,并不断向高智能化、多元化、艺术化和绿色环保等适应时代要求的方向发展。本文提出了一种创新型悬臂式双回转智能立体车库,并从车库整体结构设计、车库系统装备设计、车库工作原理以及存取车效率等方面,对新型智能立体车库的可靠性和适用性进行评价。
1 智能立体车库整体结构设计
在充分考虑场地条件、地面行车交通组织的基础上,通过分析用户停车需求、周边建(构)筑物、地下管线、车库使用频率以及周边环境等条件,初步设计为地下立体车库,其截面大致呈椭圆状,长轴约30.2m,短轴约27.2m,占地面积约670m²。车库设计为10 层,每层18 个泊车位,总停车泊位180 个,提升存取系统为2 套,设置6 个存取车出入口。地下立体车库标准层平面图、剖面图分别如图1、2 所示。

图1 地下立体车库标准层平面图

图2 地下立体车库剖面图
该地下立体车库围护结构采用钢筋混凝土灌注桩+环形支撑支护,主体结构为钢筋混凝土结构,利用主体结构和围护结构一体化的设计方法,在满足规范和设计要求的同时,节约成本,提高建设工程的经济性。车库基坑坑底采用反拱结构设计,提高基坑底部结构强度和稳定性;内部采用钢结构和混凝土结构交叉设计,利用钢筋混凝土板的刚度抵抗基坑侧向土压力,降低工程造价,缩短施工周期。
2 悬臂式双回转智能立体车库系统装备设计
2.1 智能汽车搬运器设计
传统机械式立体车库汽车搬运器的主要采用链传动,其结构形式相对简单,成本相对较低,但传动效率及传动速度较低,链条易磨损,维护和更换频率高,运行过程中机械碰撞和工作噪声较大,行程开关较多,导致整库故障率较高。
本文提出新型智能汽车搬运器为梳齿式汽车搬运器,采用全电四轮驱动方式,实现搬运器前进与后退的动作。该汽车搬运器主要分为主架体和升降车架两部分,利用8 台伺服电机和减速机实时控制,实现搬运器梳齿升降、梳齿伸缩以及停车摆正等功能,满足轴距2400 ~3200mm 的轿车、SUV等乘用车的存取要求,载重能力不小于2500kg。智能汽车搬运器结构设计如图3 所示。
2.2 悬臂式双回转升降系统设计

图3 智能汽车搬运器结构设计
悬臂式双回转升降系统主要包括回转托盘、升降框架、滑靴等三部分组成,运用2 套提升设备分区控制,大大提高了立体车库的存取车效率。回转托盘可进行360°全方位旋转,实现车辆掉头功能,确保待存取车辆直进直出。升降框架为回转托盘的基础,通过立轴、齿轮与滑靴连接,可绕中心立柱180°回转,通过伺服电机控制,实现待存车辆的停车泊位对位选择。悬臂式双回转升降系统原理图如图4 所示,悬臂式回转升降结构设计如图5 所示。
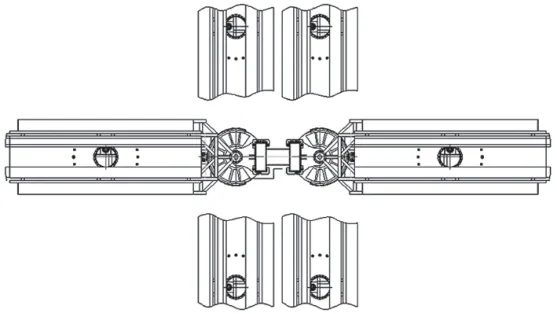
图4 悬臂式双回转升降系统原理图
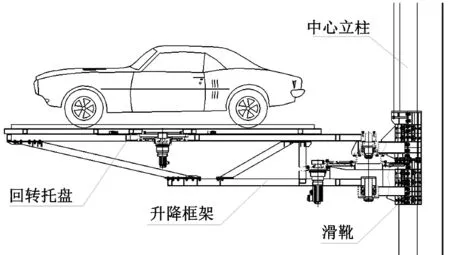
图5 悬臂式回转升降结构设计
2.3 智能控制系统设计
智能立体车库是通过控制系统自动分配和刷卡来完成车辆存取工作的。控制系统设计主要包括PLC 可编程控制器选用、升降回转系统电路设计、搬运器系统电路设计、PLC控制器连线设计和控制流程设计等。选用松下PLC FP-XH M8N16T 型可编程控制器,其具有抗干扰强、结构模块化、稳定性强、系统可靠等优点,实现智能汽车搬运器驱动系统、梳齿伸缩、回转机构和升降机构的实时控制。
控制系统主要分为输入端、计算元件、驱动元件和输出端四个部分。输入端为曳引机传感器输入、出入口车辆检测、泊车位车辆有无检测、旋转平台车辆检测、搬运器运动限位检测、搬运器梳齿动作限位检测、升降平台上下限位检测等。输出端为曳引机正反转、旋转平台电机正反转、搬运器电机正反转等,并设置有急停开关及故障检测元件。PLC 智能控制连线设计如图6 所示。
3 悬臂式双回转智能立体车库工作原理

图6 PLC 智能控制连线设计
悬臂式双回转智能立体车库通过PLC 控制系统完成汽车搬运器、升降机构、回转机构及运行状态检测和存取车控制。存放车辆时,可通过IC 卡、按钮或APP 下发存车指令,控制系统自检是否存在故障,若有故障则停止下一步动作,否则,汽车搬运器接受指令,搬运器梳齿伸出、抬升,将待存车辆运送至回转平台;搬运器到达回转平台指定位置后,升降系统下降,同时回转平台完成180°旋转,实现车辆掉头;PLC 控制系统检测传感器信号,回转平台到达指定层位后,曳引机停止转动,旋转机构通过形成开关控制进行精确定位,使回转平台与待泊车位精准对接;搬运器前进,并将梳齿降下、缩回,返回至中间旋转平台,此时车辆已停放至泊车位。取车流程与存车流程设备动作相逆。智能立体车库存取车流程如图7 所示。
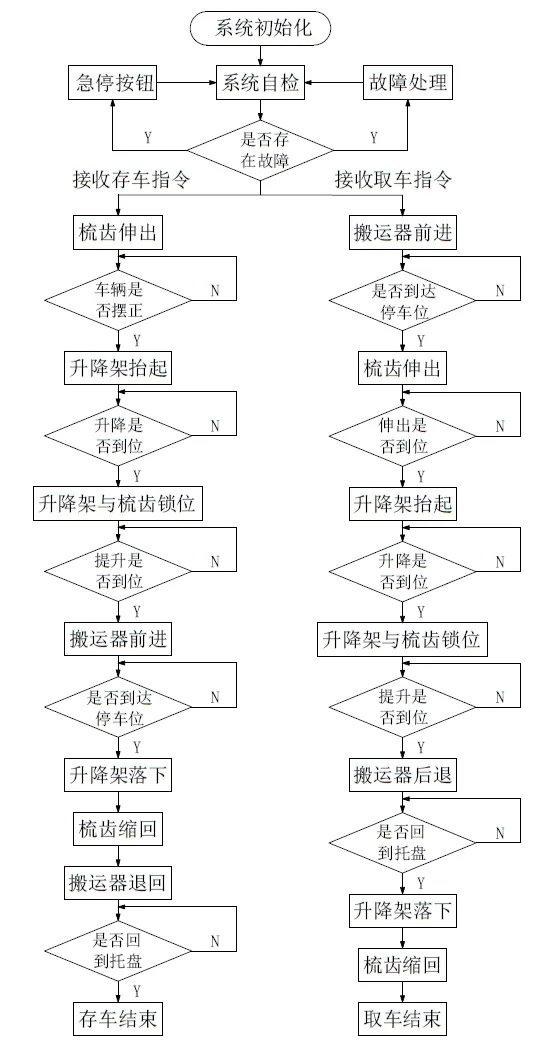
图7 智能立体车库存取车流程图
4 智能立体车库存取车效率分析
为了充分发挥机电设备能效,提高立体车库的存取车效率,实现存取时间及能耗最优。本文采用排队理论方法对智能立体车库存取车时间进行了分析。以存车为例,分别对立体车库最远端、最近端存车时间进行计算。
根据设计层数为十层的地下立体车库,总停车数量为180 辆,最远端存车是指将车辆从出入口输送至最底层(第十层)1 号或9 号泊车位后,搬运机构空载状态返回至出入口。整个存车的过程包括搬运器到出入口接车,升降系统动作,大回转悬臂系统动作,小回转转盘动作,搬运器将回转结构载车板上待存车辆运送至停车泊位,搬运器退回至载车板,大回转机构回位,升降系统将旋转机构运送至停车出入口,完成最远端存车。通过对系统各驱动器、伺服电机、传感器、行程开关等动作反应时间分析,最远端存车的短用时为58s。
最近端存车是指将车辆从出入口输送至最高层(第一层)中间泊车位后,搬运机构空载状态返回至出入口。最近端存车流程与最远端相同,通过计算分析,最近端存车的最短用时为44s。
5 结语
本文提出了一种悬臂式双回转智能立体车库的创新设计,介绍了智能立体车库的工作运行原理,并给出了地下立体车的建筑结构设计方案,该方案可充分利用深层地下空间,平面布置灵活,节约占地面积。对汽车搬运器系统、悬臂回转系统进行了结构设计和控制研究,利用排队理论方法对立体车库的存取车效率进行了分析,通过计算得出了悬臂式双回转智能立体车库单次存车时间介于44 ~58s 之间。随着我国城市化的快速发展,汽车保有量持续增长,对停车位的需求急速增加,本文提出的创新型悬臂式双回转智能立体车库具有占地面积小、空间利用率高、停车效率高和智能化水平高等特点,可有效解决城市停车难题。
