巡检机器人机械结构设计探究
2020-05-12孙元元
孙元元
(山东金惠新达智能制造科技有限公司,山东 济南 250000)
1 综合管廊巡检机器人国内外现状
早在21世纪初(2005年),美国、日本以及欧洲等发达国家就已经创建了服务城市管廊建设的“巡游者”地下电缆检测机器人,它正式开启了综合管廊巡检机器人的技术先河。2010年后,我国也开始深入研究综合管廊巡检机器人,对其内部精密结构进行有效设计,目前,我国设计出的机器人在结构上更为紧凑,运动上更为灵活且稳定,是符合国家综合管廊巡检要求的先进机器人技术类型。下文就结合我国的综合管廊巡检机器人结构设计展开相关案例分析。
2 某管廊环境分析
某城市有综合管廊,它集约度较高,且科学性表现强,属于城市中的综合管线工程。伴随着城市化建设脚步的不断加速,综合管廊数量也在逐渐增多。为了保证该管廊建设安全稳定性,确保其未来运行安全可靠,需要对其综合管廊的铺设、排水、通信、电力线路设计应用展开分析。考虑到城市综合管廊环境复杂多变,为保证其管廊安全运行,就必须展开严格监测工作,例如,对管廊中的温湿度、有害气体成分变化等进行监测。如果采用传统人工巡检方法,不但危险系数颇高,且容易出现各种疏漏。如果采用综合管廊巡检机器人,则可以利用它的高清摄像头与传感系统,采取全天候不间断的设备巡检计划展开综合管廊巡检工作,随时随地将巡检异常报告数据结果呈报给后方中心,配合运维人员、消防系统人员、通风系统人员,及时快速地消除管廊中的所有安全问题隐患。
3 综合管廊巡检机器人的结构设计分析
3.1 基本工作原理
巡检机器人的基本工作原理复杂,它主要通过不同机构不同的原理完成不同的运动动作。当机器人在轨道上悬挂行走时,其行走动力就会为行走轮提供滚动动力,同时,考虑到工作环境需要,机器人要兼顾小转弯、大爬坡、直线快速行走,大扭矩减速爬坡行走、机器人需要在轨道任意位置取下等多种功能。
为了防止发生火灾,管廊内有很多的防火分区,而一台机器人的巡检任务不止一个防火分区,因此,需要机器人能够有精准穿越防火门的能力。而且要保证防火门自动关闭后,满足管廊防火要求。
在高管廊应用中,为了全方位无死角地巡检,红外摄像头与高清摄像头需要有伸缩要求,伸缩行程往往要求在1.8m以上,同时,还要保证比较小的基础高度。
防护性能要求,管廊内阴暗潮湿环境恶劣,内部电气设备都需要满足防护等级IP65以上的要求,同样,巡检机器人也不例外。机器人外壳设计时,需要全方位考虑防护性能。
3.2 结构设计思路
针对巡检机器人的结构设计,需要围绕以上这4个方面展开:首先,是针对巡检机器人的行走驱动结构展开设计;其次,是针对巡检机器人探测设备伸缩性能展开设计;再者,是机器人的外壳防护设计;最后,是机器人总体模型设计。结合这4种设计形成一套完整的思路,就以巡检机器人的驱动结构设计与防护结构设计为例。
(1)驱动结构设计。驱动结构设计要求所设计的巡检机器人其主要行走功能依附于轨道,除常规的直线行走功能外,也要求机器人能够实现大爬坡与小转弯,所以,这一总体结构设计过程相对复杂,需要结合巡检机器人的不同结构功能展开分析,驱动结构设计如图1所示。
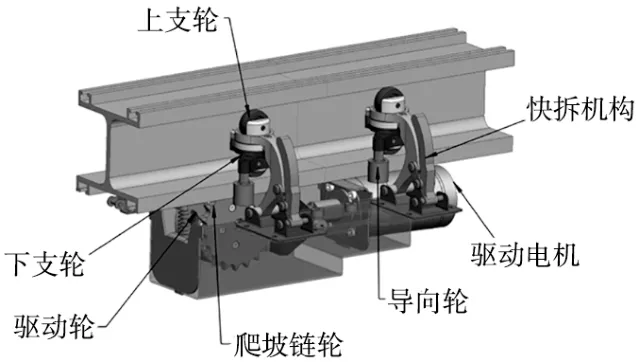
图1 巡检机器人轨道驱动机构总体设计
第一步,要求巡检机器人的总体设计满足机器人正常行驶、跨越等要求,保证机器人在直线运行轨道上能够高速行驶。驱动电机为驱动轮提供滚动动力,滚动动力通过驱动轮与轨道之间通过弹簧压力而产生的摩擦力实现机器人的行走运动。
第二步,要求机器人实现小的转弯半径,通常要求能够达到的最小转弯半径为R300mm,满足管廊内紧凑的空间环境。如图1所示,轨道两侧分别有4个导向轮,两个导向轮是可以沿着一定的中心轴旋转的,从而适应轨道不同的弯曲半径,实现小转弯运行。
第三步,通过链轮链条实现大扭矩减速爬坡行走,驱动电机将驱动动力传递给驱动轮的同时,驱动轮与链轮之间经过一定的行星减速结构,使其链轮速度减小的同时驱动力加大,满足爬坡慢速大扭矩的需求。爬坡的同时,上支轮与下支轮夹紧轨道,保证机器人姿态稳定,从而实现90°爬坡。
最后,实现在轨道任意位置满足机器人的快拆功能,轨道在整个管廊内的路径会很长,首尾跨度能达到4~5km,在这么大的跨度下,如果机器人出现故障,机器人无法从轨道上取出,将会给后续的施工与检修带来不便。图1中的自锁式快拆机构,机器人正常运行时,由于重力的受力方向,快拆机构处于死点状态,下支轮能很好地起到支撑作用。当只有拨动快拆机构的把手时,死点状态解除,机器人即可从轨道上卸下。
(2)机器人防护结构设计。机器人防护结构设计,如图2所示。迷宫式的防水槽,能够减缓水流的冲击压力。内置车用防水胶条,提供了更大范围的压缩量,为防水设计提供了双重保障。
图2 迷宫式防水结构设计

图3 巡检机器人总体模型
(3)机器人总体模型设计。当各个控制部件、各个机械模块功能设计完成后,需要对其进行组装,进入对机器人的总体模块设计阶段,在这一阶段,需要考虑机器人的重心、各应用模块布局与走线以及重要零部件的检修性能。此时,工业设计工程师根据其检修性与布局,开始对机器人进行外观设计。以上构成了巡检机器人总体模型,如图3所示。
3 管廊巡检机器人应用分析
考虑到综合管廊环境具有一定的特殊性,需要结合巡检机器人的本身固有特征结构展开分析。首先,明确城市综合管廊的基本长度、有多少防火分区、考察机器人的长距离巡检能力,以及所需要的安装的巡检防火门的个数。由于采用轨道式挂载结构,因此,轨道在管廊内的路径布局以及施工是要着重考虑的,以下结合该巡检机器人的轨道结构设计及技术展开分析。
巡检机器人本体可以达到300mm的转弯半径,但是,城市管廊一般长度跨度大,因此,轨道采用R2m转弯轨道拼接即可。另外,轨道施工路径一定不能妨碍管廊内吊装口、下料口、通风口、人员出入口以及出线口的正常使用。考虑综合管廊巡检机器人挂载在轨道上,整个机器人的重量由轨道承担,同时,需要考虑设计轨道力学特性是否满足要求,必要时要展开仿真验证。在经过初步的仿真验证测算后,发现管廊机器人的本体重量应该可控制在25~30kg,可选取30kg最大值,保证每根轨道吊装间距在1.5~2m,如此可以保证巡检机器人在轨道中点行驶时轨道上出现的最大应力形变,满足轨道强度的设计要求。
4 结语
对于城市建设而言,综合管廊巡检机器人的设计与应用是非常必要的,而通过全文所论述的一系列设计,可保证机器人在轨道运行上稳定有效,同时,满足作业强度要求。无论是直线轨道或是弯道,要确保设计到位,使机器人能够胜任各种巡检任务,体现机器人精确的检测能力,提高其城市化建设实用价值。
