基于线激光的鱿鱼扫描系统与分割算法研究
2020-05-12徐志鹏谢代梁
徐志鹏,刘 魁,谢代梁
(中国计量大学 计量测试工程学院 浙江省流量计量技术研究重点实验室,浙江 杭州 310018)
提高鱿鱼分割效率是各水产企业生产过程中亟待解决的问题,而鱿鱼表面性质限制了生产人员对于分割重量的掌握。依赖智能化设备获取鱿鱼表面轮廓和分割是智慧渔业的重要组成部分,对鱿鱼表面轮廓进行测定是分割前的必要步骤,无损测定轮廓可为后续精准分割提供数据支持。
目前并无对鱿鱼表面轮廓测定的有效方法,多数水产企业依靠工人的熟练度对鱿鱼进行分割。然而,人工分割方式对工人熟练度要求较高且效率和精度达不到企业的要求,因而利用三维线激光扫描获取数据成为测定鱿鱼表面轮廓的新方向。
国内对于鱿鱼自动分割仍处于空白阶段,冰岛的Marel公司可根据尺寸要求对三文鱼进行自动分割切片。目前常见的三维点云获取设备主要有:基于双目相机的立体视觉系统,利用结构光来获取对象深度信息原理的Microsoft Kinect,基于激光扫描原理的FastScan、Vivid9i等。但是双目立体视觉系统使用前需人工校正相机,基于结构光的深度图像系统对光照环境的要求较高。
基于多点激光量测的新型自动化量测方式在国内外逐步发展,先进的三维线激光技术因其具有高效能、高精度和高密度的优点被广泛应用于各个行业,适用于不规则物体的检测。目前,比较成熟的线激光扫描仪生产厂商比如基恩士、LMI等公司,可根据实际需要提供不同型号的扫描仪。本文提出一种利用LMI线激光扫描仪平台获取图像,对鱿鱼表面3D表型信息进行提取的方法。
该方法通过运动平台的移动使鱿鱼通过线激光扫描区域,获取点云数据,并针对点云数据处理问题,采用高度特征阈值分割算法实现点云去噪;针对不同规格大小的鱿鱼,根据其分割要求,采用分割算法实现点云分割,结合鱿鱼密度将体积结果转化为质量结果,实现鱿鱼等质量分割。
1 材料和方法
1.1 分割要求
原材料鱿鱼通常为去掉头部和尾部、两侧平齐的块状产品。为保证鱿鱼产品标准化包装,企业的分割要求为:将片状产品分为若干片侧边对角线长度和质量相等的条状产品,以进行包装出口,要求每片质量误差为±1 g。
每片分割鱿鱼的长度即为块状鱿鱼的宽度,本次实验选取的鱿鱼产地为浙江舟山,长约160 mm,宽110 mm。分割产品规格对角线长度为35 mm,质量为32 g,选取两组。
1.2 基于线激光扫描仪的点云获取
本文使用的图像采集平台为Gocator 2150系列产品。该产品可以满足设备需要较高扫描速度、获取点云数据的需求;有足够大的视野范围,以保证在鱿鱼表面较为粗糙、起伏较大的情况下,能够获得较为完整的数据;同时,线激光设备可以抵御一定的光照影响。
从图1可以看出,净距离和测量范围决定了传感器的架设高度,每条轮廓点上的激光点数及各个方向的分辨率与重复性可综合表征为激光传感器的分辨率与稳定性指标,分辨率及重复性越高,获取的激光点数据越精准。
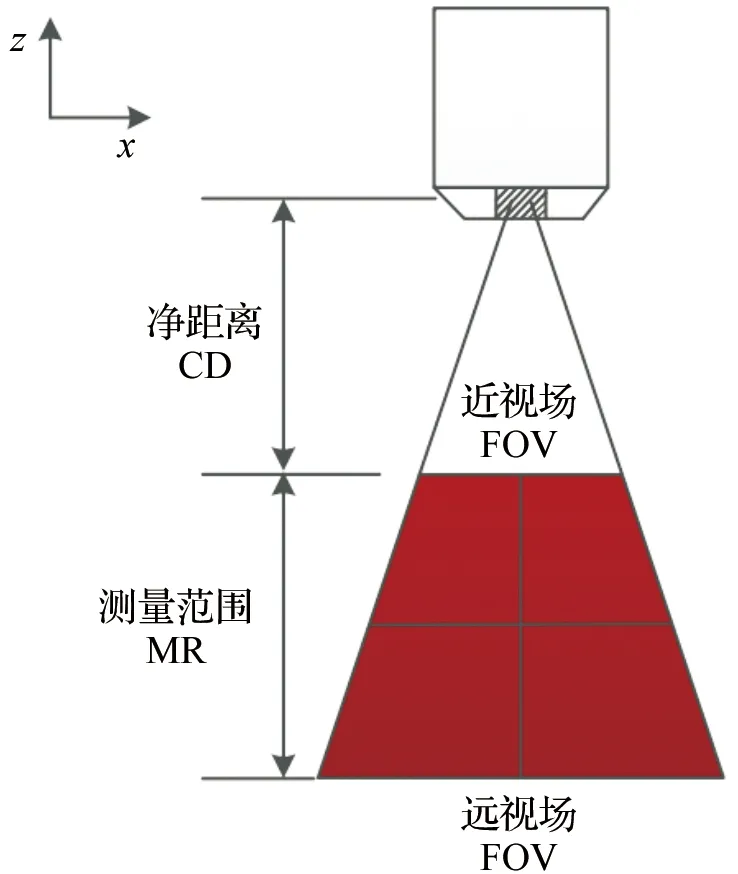
图1 Gocator 2150系列传感器产品示意图Figure 1 Schematic diagram of Gocator 2150 series sensor products
在其他条件相同的情况下,X方向最高与最低分辨率每100 g可产生3~5 g质量误差,为保证运算精确度,X方向分辨率精度设为最高即0.3 mm。考虑到数据的连续性,并能获取足够多的数据量进行分析,点动频率为50 Hz,即每秒获取被测鱿鱼50个断面的数据。
1.3 分割计算
处理点云数据实现鱿鱼分割的过程如下:1)分割背景点云;2)基于高度差值使用阈值分割法去除鱿鱼表面的噪点,相邻数据差值大于4 mm认为点云数据存在噪点,需要剔除;3)根据实际需求对点云的三维坐标矩阵进行分类,实现鱿鱼片点云的分割;4)基于分割模型,借助密度将体积转化为质量,计算分割出的每片鱿鱼质量。
1.4 背景点云分割
针对密集点云数据繁杂,识别鱿鱼轮廓的问题,将其中相邻两点高度差大于10 mm的点云数据视为鱿鱼边缘,由此可提取鱿鱼的整体轮廓,用于下一步计算。
2 分割算法
为保证扫描模块与分割模块工作协调性,将距鱿鱼一侧5 cm处作为基准线,其中与基准线对应点云数据作为参考数据,提取该行数据将其作为计算参考侧面,图2为该行点云数据对应的鱿鱼侧面示意图。
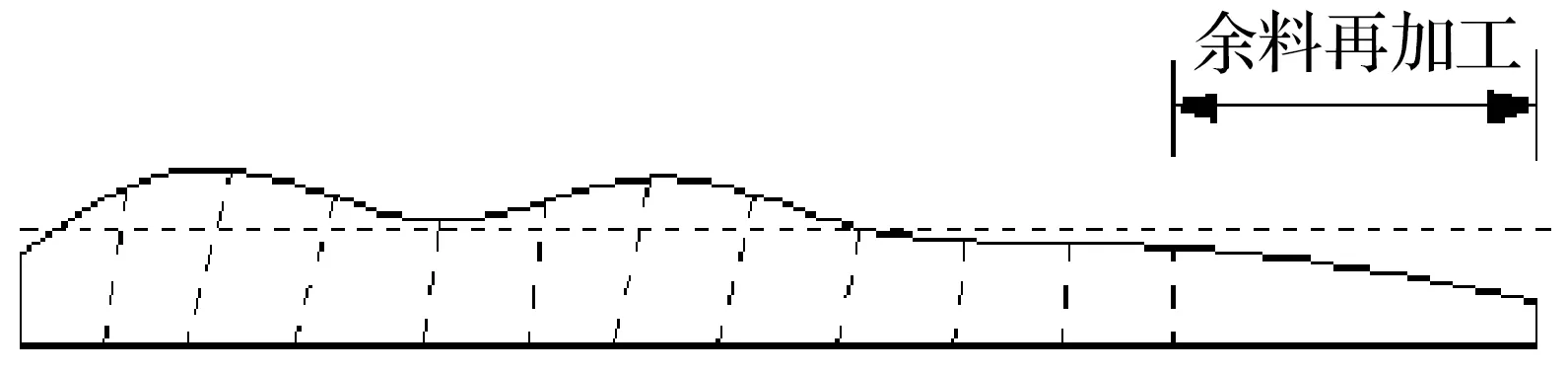
图2 侧面示意图Figure 2 Side view
产品是否合格以最后的称重为准,由于待切鱿鱼的底面平整,整体呈弧形,本文采用积分计算方法得出单片鱿鱼的质量。
分割算法切分鱿鱼的运算步骤如下。
1)确定第0分割点。鱿鱼表面厚度分布不均匀,点云矩阵内高度不足整体高度的2/3部分视作废料,继而从满足该条件的位置作为第0分割点,通常初始角度设为45°,可根据实际情况进行调整。
2)确定第n分割点。如图3,建立侧面平面坐标系,横坐标为X轴,纵坐标为Z轴,A点为坐标原点。θ0为第0分割角,刀面与上表面交点为B点,以A点为圆心,侧边对角线L为半径作圆周运动进行搜索,当侧边对角线L与上表面相切时停止搜索,切点记为C点,即第n分割点。
3)确定第n分割角度。将A点与B点连线视作直线方程,记作f(x1)。分别过B点与C点作垂直辅助线,与底边交点分别记为D点和E点。B点与C点之间数据点通过线性拟合得到曲线方程,记作f(x2)。以点E为起点向前搜寻,该搜寻点记为F点,C点与F点连线视作直线方程记作f(x3)。A点至D点距离记作xn,D点至E点距离记作xn+1,E点到F点的距离记作xn+2。
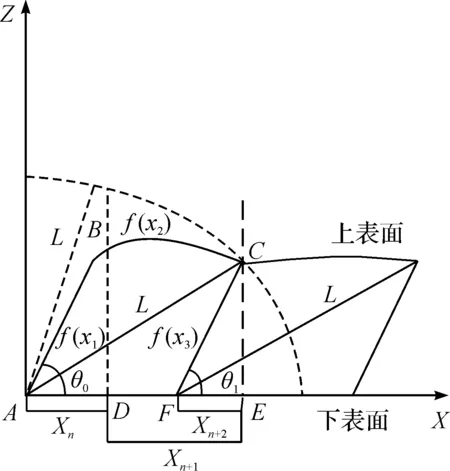
图3 分割示意图Figure 3 Segmentation diagram
最终所需分割侧面由A、B、C、F四点围成,其面积设为S,单位为mm2。A、B、D三点围成图形面积记为Sn,B、D、E、C四点围成图形面积记为Sn+1,C、F、E三点围成图形面积为Sn+2,三组面积有其对应的函数积分得出,公式总结如下:

(1)

(2)
(3)
Sn+Sn+1-Sn+2=S。
(4)
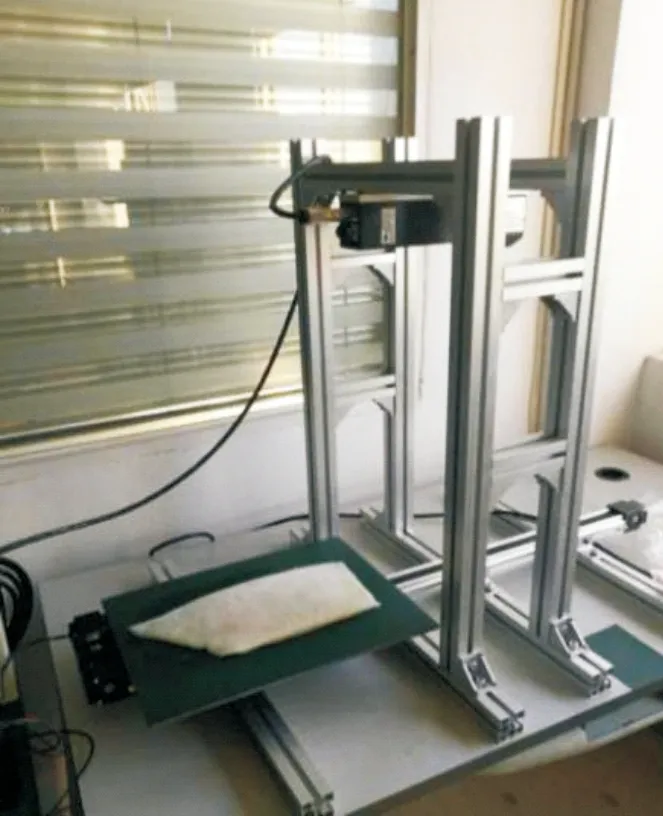
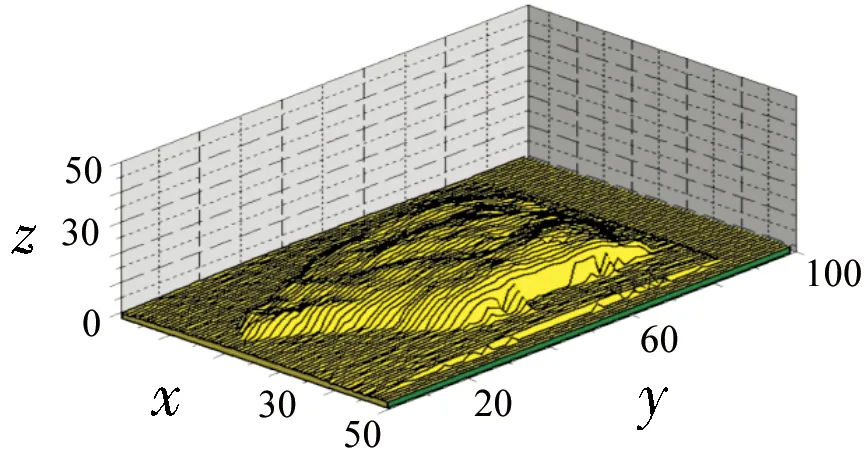
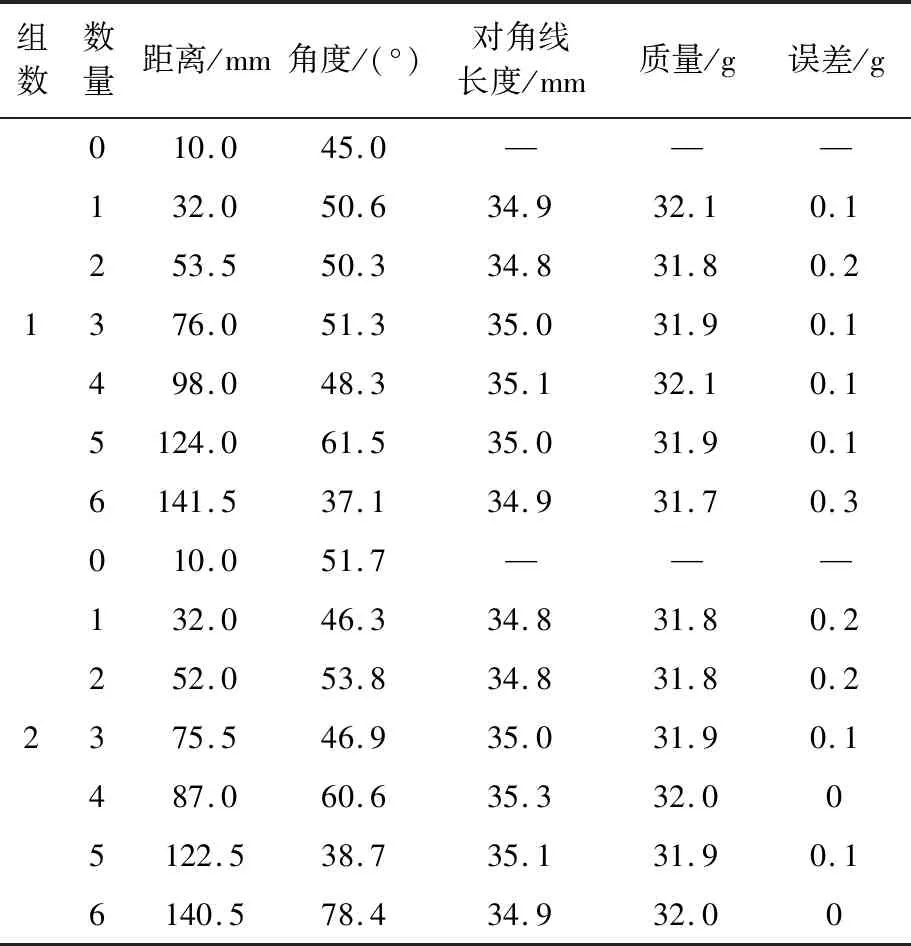
如果Sn+Sn+1 4)确定第n+1分割点。重复上述步骤2,直至无法满足条件即停止搜寻。结合每片鱿鱼的长度可得出该片鱿鱼的体积。 将得出体积值与鱿鱼密度结合,最终输出为每片产品质量,分割计算程序流程图如图4。 图4 程序流程图Figure 4 Program flow chart 系统程序由上位机程序和下位机程序组成。 上位机程序采用LabView软件编程,通过人机交互界面控制,程序由以下几个模块组成。 1)参数设置模块。输入目标鱿鱼的侧边对角线长度,所需质量等信息。 2)扫描控制模块。由OPC通信控制扫描模块运动,协调扫描模块中运动部件的作业,记录原始数据。 3)数据优化模块。为保证计算的准确性,对无效数据进行剔除,保留鱿鱼表面有效轮廓数据,输出优化后点云数据。 4)结果计算模块。得出分割点位于基准线的位置及分割角度,显示每块鱿鱼可切片数及每片重量。 该装置分为扫描模块和分割模块,扫描装置由支架主体、LMI Gocator 2150线激光扫描仪、欧姆龙CP1H型PLC、汇川IS620N系列伺服、传动皮带、人机交互界面组成。其中支架主体为铝合金材质,具有较高的强度,抗变形能力强。传动皮带负责搭载鱿鱼,线激光扫描仪通过端面连接板固定在皮带上方500 mm处,方向与传动皮带方向一致。伺服电机由PLC控制,PLC通过串口连接到人机交互界面,通过OPC标准使用LabView软件控制电机启停。扫描装置如图5。 图5 扫描装置Figure 5 Scanning device 分割模块由分割刀具、固定条、伺服电机、气缸和传动皮带组成,伺服电机控制分割刀具的角度。气缸控制分割刀具的下切,固定条用来分割时固定鱿鱼,保证精确度。通常鱿鱼采用冷冻储存的方式,保鲜的同时利于切割,选取刀具带有一定弧度,以保证作业时刀具不会粘连鱿鱼,影响产品重量和工作效率。 对点云数据进行分析,原始数据共1 049×563点云数,行列差值与分辨率和激光点动频率相关。首先采用阈值分割法去除其中噪点,去噪前的点云数量为590 100,去噪后的数量为536 148。去噪处理后,噪声减少,点云更加平滑。 去噪后鱿鱼表面重建结果如图6,得到更精确的鱿鱼表面模型。 图6 鱿鱼模型重建Figure 6 Squid model reconstruction 经上述方法计算得出鱿鱼的分割位置及最终分割质量,输出最后计算结果。表1为单片鱿鱼输出结果。 从表1可以看出,原材料鱿鱼的规格较为一致,算法计算出的切分位置和切分角度较为接近。为了满足对角线长度和重量的要求,最后一刀的角度与前面的切割角度相差较大。 表1 单片鱿鱼分割结果Table 1 Results of single slice squid segmentation 分割对角线长度的最大误差为0.3 mm,即0.86%;最大质量误差为0.3 g,即0.94%。可满足企业实际生产需求。结果表明,在不直接接触鱿鱼的前提下,本方法成本低,实现了鱿鱼的精确分割,符合企业的生产需求,为鱿鱼生成自动化提供了技术支持。 文中研究了基于三维点云的鱿鱼分割算法,针对鱿鱼表面不平整,不利于自动化分割的问题,采用阈值分割法进行去噪,得到更为精确的鱿鱼重建模型。根据鱿鱼侧边对角线长度和质量要求,采用积分法确定每次分割点的位置。 相对于目前普遍的人工分割鱿鱼的方法,本文鱿鱼片分割质量最大误差0.3 g,满足实际生产需求,保证了算法分割鱿鱼的准确性。本方法解决了人工分割效率低与精度低的问题,为企业实现产业自动化提供了技术支持。 同时,由于水产通常采用冷冻储存的方式,不同鱿鱼的含水率不同,同时,点云矩阵数据受扫描分辨率影响,与实际结果存在偏差,计算结果与实际重量仍有一定的误差,后续需要根据实际情况加以改进,进一步缩小误差。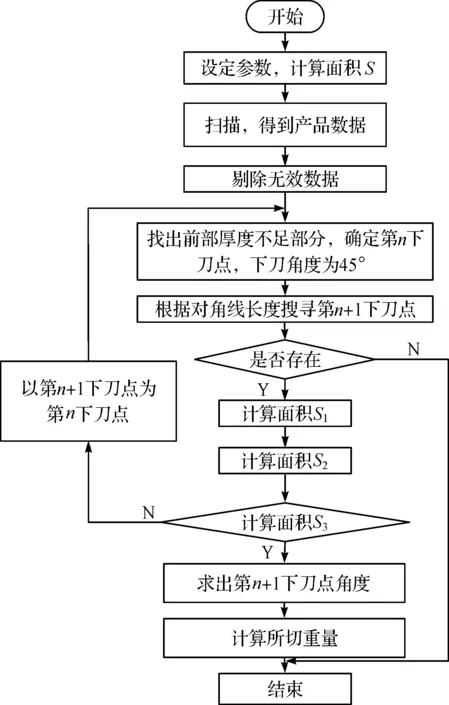
3 程序结构
4 实验结果分析
4.1 装置介绍
4.2 鱿鱼模型重建
4.3 结果分析
5 结 论