一种新型水泥库清理机器人设计与优化
2020-05-11包卿希张照益王建强b
包卿希 张照益 王建强b

摘 要:传统水泥库清理大多采用人工作业的方式,效率低下且容易发生事故,是一种高劳动强度、高危险性的特种作业。在水泥库顶开口较小而水泥库的体积又很大的情况下,如何保证清理范围覆盖面广且更安全高效快速,成为了亟待解决的核心问题。文章针对水泥库清理现状,提出了一种新型机器人,对其工作环境及功能要求进行分析,完成了机械结构设计并进一步优化,旨在实现水泥库清理作业的智能化,提高水泥库清理的工作效率和安全性。
关键词:水泥库清理;清库机器;机械设计;结构优化
Abstract: Traditional cement silo cleaning is mostly done manually, which is inefficient and prone to accidents, so it is a special operation with high labor intensity and great danger. The primary problem that needs to be solved urgently is how to ensure that the cleaning area covers a wide area, while maintaining safety, efficiency and speed, in the case of a small opening at the top of the cement silo and a large volume of the cement silo. This paper proposes a new type of robot for the current situation of cement silo cleaning. It analyzes its working environment and functional requirements, completes the mechanical structure design and further optimizes it. It aims to realize the intelligence of cement silo cleaning operations, improve the efficiency of cement silo cleaning, and provide workers with a safe working environment.
前言
在清理水泥库的过程中,由于水泥粉料与水泥库库壁贴合紧密、难以移除,以及现有水泥储存结构存在可操作空间非常小等问题,给水泥储存清洁人员带来了严峻的挑战[1],大多数水泥生产企业和社会企业还没有充分认识到水泥储存清洁项目的难度和危险性。
现如今,市场上专门针对清库的装备研发依旧处于初级阶段,所研发的产品也仅仅局限于简单的协助人工清理。伴随着水泥和矿场企业生产效率的提高和国家对工人安全健康的高度重视,自动化取代人工清库会逐渐成为市场的导向,满足企业和水泥库清理工人对高效自动化清理机器的迫切需求。
针对上述问题及背景,本文提出了一种新型水泥库清理机器人,具备更高效安全的作业形式,更可靠稳定的机械结构,对实现水泥库清理的智能化、高效性、安全性具有重要的工程意义。
1 水泥在水泥库中的积料形式
水泥粉料在水泥库中的流型大体分成整体流、漏斗流、管状流、扩散流四种情形,主要是由于水泥库内水泥长期以来粘结变质,导致水泥库容积变小,在库内生成了多种不同类型的积料形式[2]。
水泥粉料在水泥库中的主要积料形式有依附性、鼠洞型、拱型、堵塞型等。其中,鼠洞型和依附型是水泥库中较为常见的情况,也是比较容易清理的状态。而拱型和堵塞型处理起来比较复杂,是在前两种情况下的进一步演化,在实际生产中也会遇到。
2 机械结构设计
水泥库清库机器人主要由底座支架、旋转机构、卷筒提升机构、工作臂机构组成,如图1所示。
2.1 末端执行机构动力系统设计
水泥库内壁清理机器人中的动力输出主要有以下几个,一是卷筒系统动力源电机;二是固定平台的360度旋转驱动电机,三是末端执行机构的旋转驱动电机。
由于末端执行机构电机决定了水泥库清理的效率和质量,根据其性能需求,确定使用伺服电机作为驱动电机。选用南京埃斯顿自动化有限公司生产关于EMG型号电机。
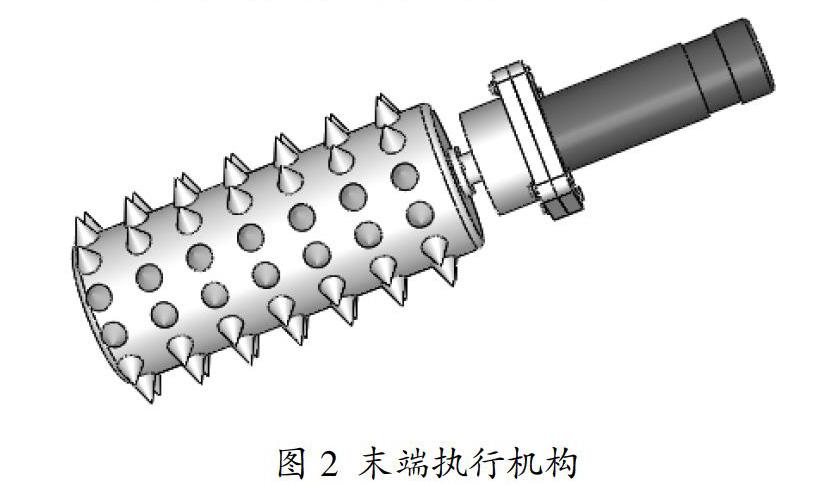
2.2 末端执行机构设计
末端执行部分是清理水泥库壁粘料的重要载体,它清理的好坏直接影响库壁整洁。目前,主要的驱动方式有电驱动和液压及气压驱动。液压驱动可以提供驱动压力和动力。具有响应速度快、定位精度高、刚度高等特点。由于液压油系统多变,工作性能受环境影响较大,工作性能较低,容易发生卸油现象。它通常用于提供更大的驱动力矩和移动性能。气压驱动结构简单、性能稳定等优点,但驱动力矩不易控制0。电机驱动具有操作简单、精度高、控制准确、响应快等优点。通过以上比较,提出了电机驱动的旋转破碎法。电机驱动末端执行机构三维图形如图2所示:
2.3 卷筒提升机构设计
卷筒提升机构是实现工作臂可自由升降的机械装置。卷筒提升机构主要由驱动装置、传动装置、绕组装置系统和制动装置组成。除此之外,还可装连接各种辅助的限位装置,如升起高度限位器,力矩限制器等保护系统安全。驱动系统多采用电机驱动,易于布置、安装和维修。传动装置包括减速器、弹性联轴节和传动轴。缠绕装置主要包括卷筒和钢丝绳滑轮组。卷筒系统如图3所示:
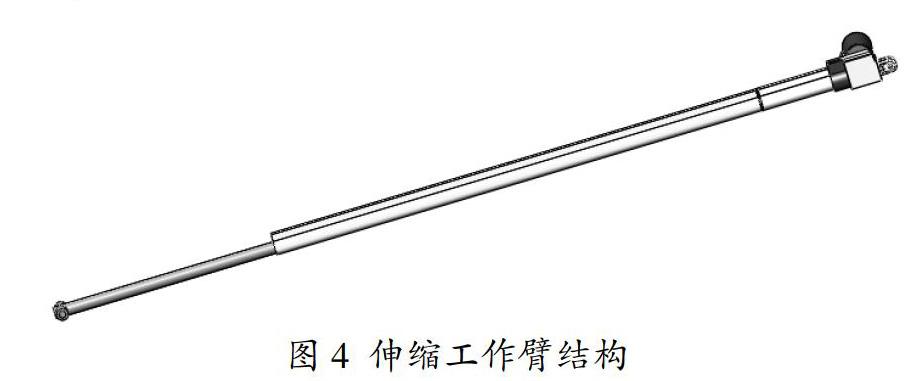
2.4 工作臂结构设计
工作臂的主要形状直接决定了整个清洗装置的范围,因为水泥仓库是中心下料和顶部偏移开孔的情况。根据实际工作情况,动力头不需要工作在水泥库内的所有位置,需要与水泥库内壁保持一定的距离。针对这种偏心情况,选用电动伸缩推杆来使末端执行能够达到库壁料的指定位置,并清理。电动推杆工作臂如图4所示:
3 力学分析
在清库装置中,根据工作情况及经验分析可知,最薄弱的环节为工作臂部分,其中带伸缩臂的小臂以及大臂与小臂间的连接轴是主要的受力部件。因此,将对这两部分首先进行静力学分析。对已建立的模型进行分析如图5所示。
可以看出,伸缩臂的应力主要集中在与轴连接的端部,其最大应力接近铝合金材料的最大许用应力,应注意保护。其次,直径变化处也较为集中,可通过焊接加强筋等方式来加固。
4 结束语
在我国,传统的水泥库作为水泥的主流储存方式,不仅数量巨大,而且多会出现库壁挂料和积灰的状况。传统的水泥库清理方法不仅清理时间长,影响了企业的正常生产,而且清库导致的安全事故频发,企业很难找到合适的清洁工人来完成工作。因此,开发自动化的库仓清理机器人系统而非人工作业显得尤为迫切,具有重要的社会意义。
参考文献:
[1]王卫恒,闫青,朱旭.水泥库结块的原因及处理措施[J].水泥技术,2016(2):88-89.
[2]張琳.水泥库粉料粘接机理及清库系统的研究[D].河北:河北工业大学,2012.
[3]焦洪涛.料仓清堵技术及气压旋转式清堵装置的研究[J].粉煤灰,2014(1):11-12.
