基于时差定位线性算法和Geiger迭代算法的某铁矿声发射源定位精度分析
2020-05-11陈俊智
瞿 靖,陈俊智,李 云
(1.昆明理工大学,昆明 650032;2.新平鲁电矿业有限公司自走铁矿,云南 玉溪 653401)
声发射源定位是通过声发射监测手段对矿山岩土体灾害监测预警的关键步骤,矿山的灾害预警对于现实生产过程起着越来越重大的现实意义。声发射监测信号中包含众多的岩土体内部变化的信息,对于这些信息的有效处理和运用可以帮助工程中了解岩土体内部能量的变化、结构的变化、位置等信息并以此来更好地指导安全生产。很显然此项技术运用的效果很大部分取决于对于接收到的信息处理运用的准确程度。而声发射源定位算法和精度方面的工作一直以来就是热门的研究内容。
MOGI[1]早在1962年就开始了二维声发射源定位的研究;SCHOLZ[2]在1968年采用一组声发射探头阵列做了三维声发射源定位的研究。随后国内外众多学者对此方面进行了大量的研究工作,BYERLEE等[3]开始采用迭代算法进行源定位求解并就此算法提出相关的标准。何先龙,康玉梅等[4-5]分别就基于小波变换方法和花岗岩巷道岩爆声发射信号研究了信号时间差时的定位来提高定位精度。
1 时差线性定位和Geiger迭代定位算法原理
1.1 声发射源时差线性定位算法原理
时差线性算法是一种代数方法的求解,基于声发射事件中待求解参数构建线性方程组。此方法的优点是求解过程较为方便,可使用计算机辅助计算,求解思路易理解。缺点是线性方程组的求解结果可能会是无解,此时在此基础再使用其他数学计算方法可能就会出现误差,从而影响定位结果。
采用最小二乘法来构造残差平方和,设第i个传感器坐标(xi,yi,zi)(i=1,2,…,n),声发射源坐标(x0,y0,z0),第i个传感器接收到声发射源信号时间Ti,此地质条件下速度设为恒定v,根据时差线性定位原理可得到如下:
(1)
用Ti,Ti+1线性运算可得参数θ(t0,x0,y0,z0)是下一组n-1个线性方程的最小二乘解,即:
Aθ=r
(2)

线性定位法在获得的数据准确性较高、数据误差较小的前提下算是一种比较可靠有效的定位方法。但在工程实际应用中,可能会因为数据存在误差而影响求解精度。
1.2 Geiger迭代定位算法原理
Geiger迭代定位算法作为定位算法的一种,在地震学领域数据分析有广泛应用。方法原理是通过对选取的初始迭代值进行多次迭代最后收敛逼近我们所要得到的最后结果。每次的迭代都是通过最小二乘法求取修正量Δθ=(Δx,Δy,Δz,Δt)T加至前一次的迭代结果,得到新的迭代值,多次迭代直到最后结果满足精度要求即为要求的定位结果。相比于时差定位方法实际情况中参数选取理想化对定位结果的影响,Geiger迭代算法能更好地减小误差。
迭代结果由方程式(1)-(3)推导而来
(3)
式中:(x,y,z)为声发射源位置坐标,(xi,yi,zi)为第i个传感器位置坐标,v为波速,ti为第i个传感器接收到声发射信号的延迟时间,t为事件发生的时间。
可以通过对试验点传感器接收到信号的时间微分偏导求解来求取信号到达每个传感器的时间。
(4)
式中:tci为实验点信号到第i个传感器的时间差值。
式(4)各未知参数计算如下:
(5)
式中:R表示信号源到各传感器距离。
对于多个传感器,列出矩阵的方程为:
AΔθ=B

求解此矩阵可得:
ATAΔθ=ATB
Δθ=(ATA)-1ATB
以此步骤多次迭代直至得到满足要求的定位结果即可。
2 工程现场实例分析
为验证时差线性定位和Geiger迭代定位两种方法的效果,特结合云南某铁矿的地压监测系统采集的2019年5月的数据进行对比分析和误差分析。该套地压监测采用加拿大ESG公司的地压监测系统,传感器类型为加速度传感器,地压监测系统包含监测软件,波形可视化功能,事件定位功能,波形数据分析处理等功能。
本文就地压活动较为活跃的一个月内选取监测数据进行分析。因为井下环境较为复杂,人员设备车辆等等都会对信号的识别接收产生影响,因此从所有传感器接收到的数据中选择了受影响较小,数据较为完整的8组传感器数据作为分析使用,为描述方便,此处编号为1—8号传感器。表1为此8组传感器坐标。
因为声发射事件的随机性,上面8组传感器监测到的数据每天从几组到几百组不等,从试验的随机性和结果的代表性考虑,从当月随机抽取十天每天随机抽取一组数据进行分析研究。
声发射信号在岩体之中的传播类似于地震波,里面包含P波和S波,其中P波的传播速度更快,波形信号损失较小,也更容易被传感器识别到。所以选择P波作为信号分析的研究对象,因此时差线性算法和迭代算法中的波速也以P波为准,信号到达时间依据小波变换的算法来换算。
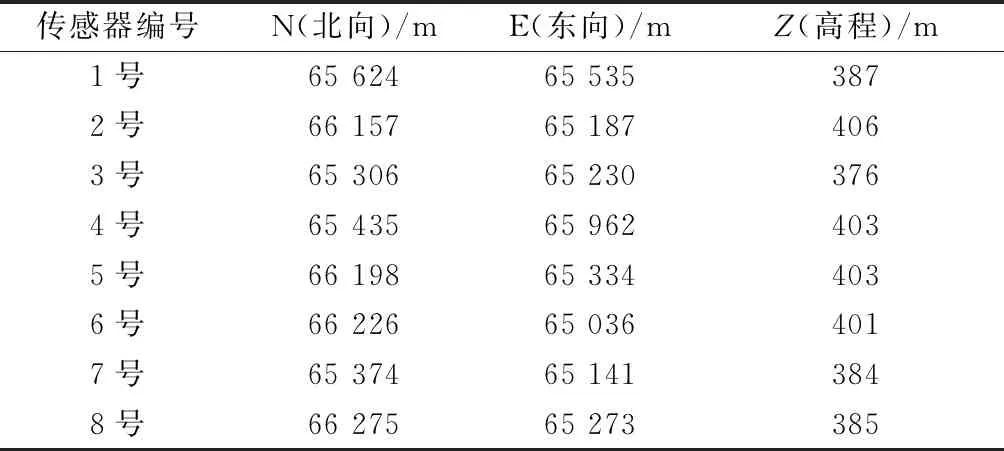
表1 传感器位置坐标
2.1 时差线性定位实例应用
时差线性定位的计算原理和过程较为简单,将所需参数输入后即可带入求解定位结果,见表2。根据矿山地质资料和地压监测系统布置情况,所需参数P波波速、P波到达时间和传感器位置坐标,波速设为6 000,P波到达时间见表3。
相关参数带入计算得到定位结果如下表:
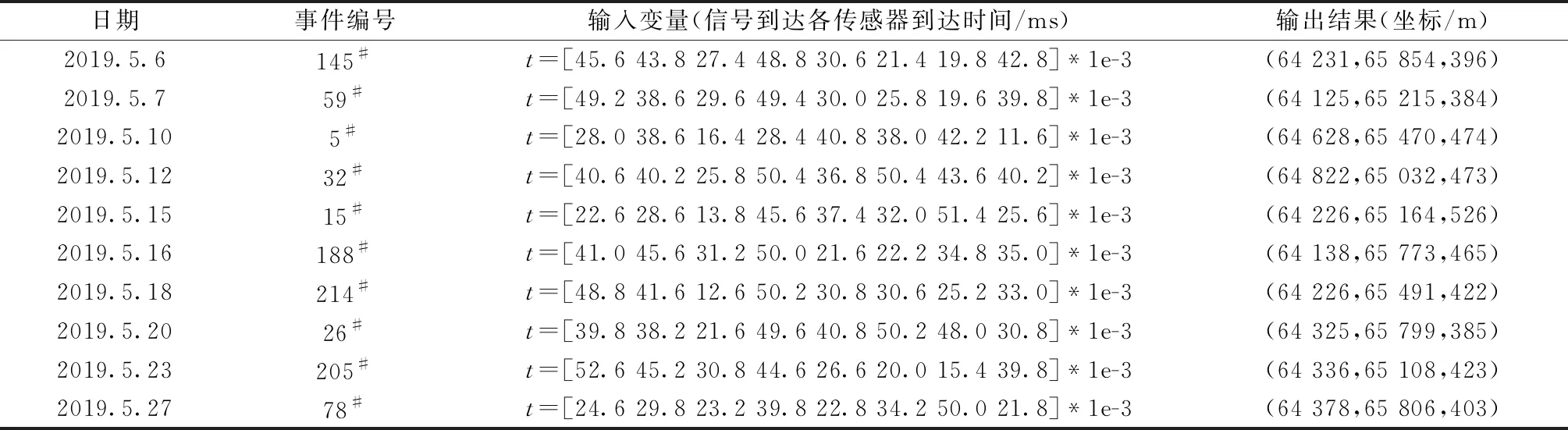
表2 时差线性定位计算结果
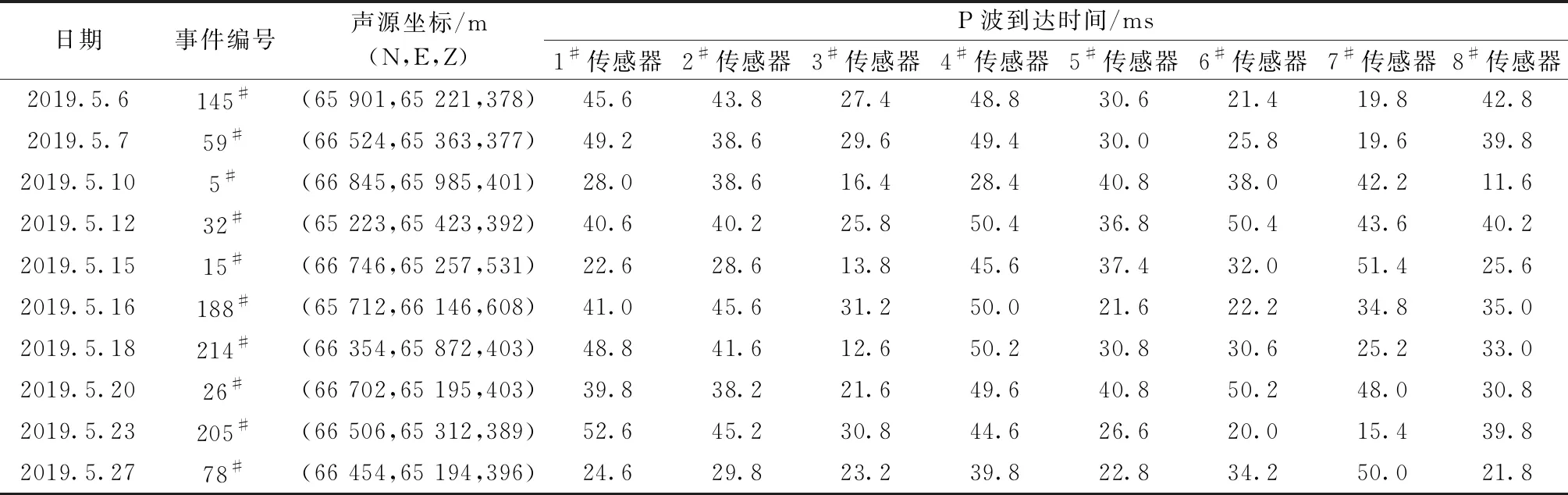
表3 声发射事件定位坐标和到达时间表
2.2 基于时差定位选取迭代初值的Geiger迭代定位实例应用
Geiger迭代定位算法的一个关键点是初始迭代点的选取,该方法是在一个合适的迭代初始点基础上一步一步地迭代直至找到满足条件的结果。所以,初始迭代点的选取将会影响后面整个过程,选取不合适可能会造成迭代求解过程的无法继续甚至错误。
因此,尽管时差线性定位算法中参数选取会理想化考虑处理,定位结果有一定的偏差,但是时差线性的结果并不是无效的,因此采用时差线性定位的结果作为初始迭代点进行后续的迭代计算。迭代过程输入为传感器接收到信号的时间差,初始迭代点坐标,最后输出结果,见表4。

表4 Geiger迭代定位计算结果
2.3 定位结果对比及误差分析
在通过两种定位算法分别计算得出定位结果后,可以把两种方法的定位结果和原始坐标进行对比来评判两种方法的效果,见表5。
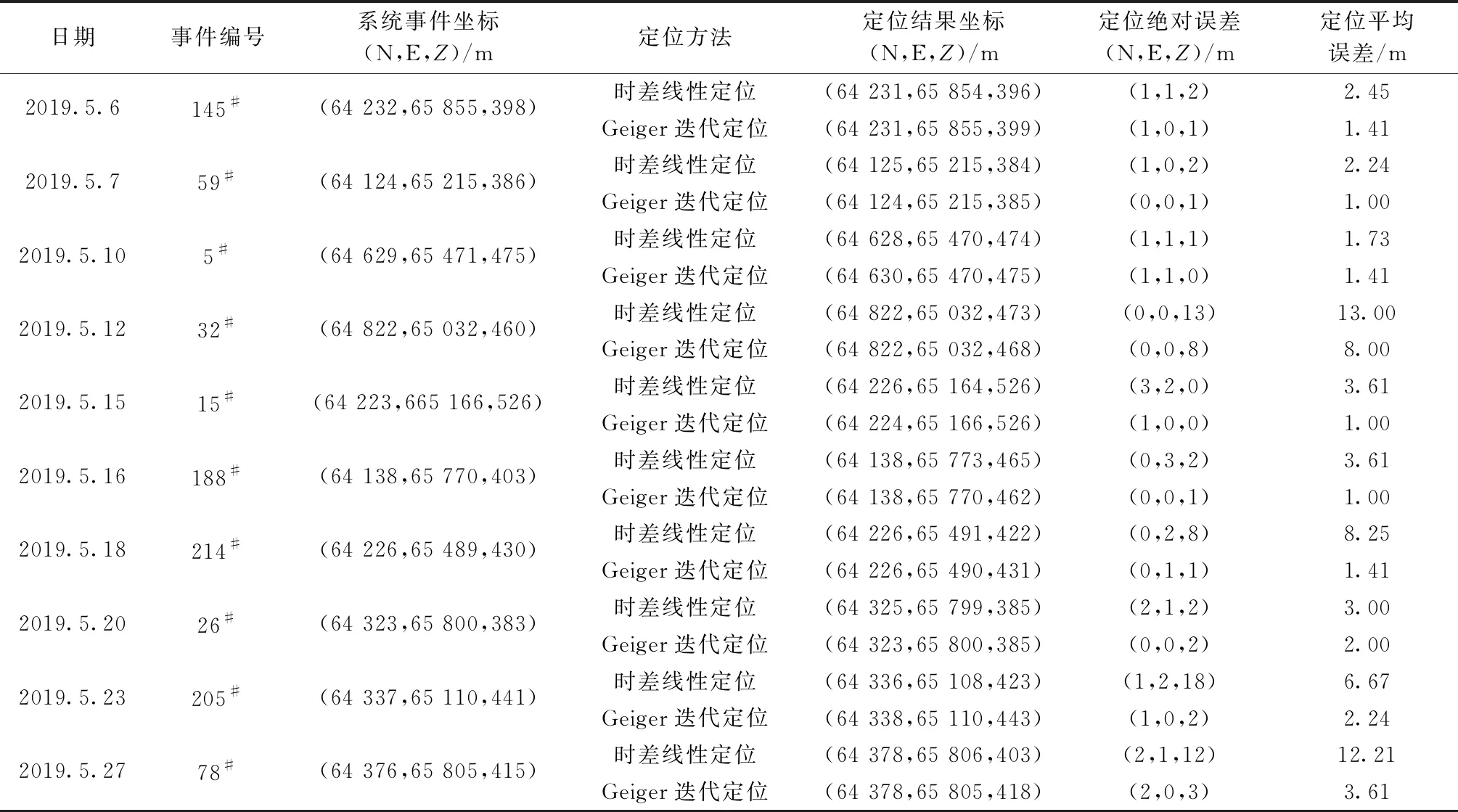
表5 时差线性定位与Geiger迭代定位结果对比
通过对两种方法结合实际工程情况的应用,最后对比两种定位方法的定位结果和误差分析,可以得知,时差线性定位和Geiger迭代定位都能有效地进行声发射事件的定位,但都与实际声发射源位置有不同程度的误差,时差线性定位平均误差为5.57 m,Geiger迭代定位平均误差为2.3 m。
3 结论
1)两种定位方法定位结果对比,明显Geiger迭代定位比时差线性定位的精准度更高,误差相对而言更小。
2)时差线性算法简单类似于“一步到位”可能会出现无解的情况,而Geiger迭代算法每次引入修正量则类似于一步步地探索前行,直至结果满足允许误差范围才停止。
3)时差线性定位虽然易出现较大误差,但是其结果可作为一个理想的Geiger迭代定位的迭代初值。
