Design and dynamic analysis of the micro-suspended monorail
2020-05-10JiangYongzhiWuPingboZengJingWeiLaiWangXingHeQinglieWangShuai
Jiang Yongzhi Wu Pingbo Zeng Jing Wei Lai Wang Xing He Qinglie Wang Shuai
(1State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031,China)(2National Institute of Measurement and Testing Technology, Chengdu 610021, China)
Abstract:A 20 degree of the freedom model of the micro-suspended monorail is established to analyze a new type of the vehicle system named micro-suspended monorail. The formula of the tire is established by using the magic formula. Through the modal analysis of the vehicle, the modes of the vehicle are obtained, and resonance has little effect on the vehicle. When the vehicle moves in a right turn curve, it yaws in the clockwise direction. Under the action of the guidewheel (stable wheel) force, the front bogie yaws clockwise but the rear one yaws counterclockwise. Moreover, the two bogies and the car body roll during the curve passing process of the vehicle. When the vehicle speed is high enough, the left drive wheel will derail and the anti-overturning moments are provided by the stable wheels. Then, the car body yaws in the counterclockwise direction when it moves out of the curve. In the simulation of the vehicle passing the curve, the clearance between the guide wheel and rail surface will lead to a fatal impact on the bogie. At the same time, the dynamic response of the vehicle under the crosswind is tested. The vehicle will not overturn due to the crosswind. Finally, the collision of adjacent vehicles is analyzed. The results show that there is an intermittent collision force between two vehicles due to the vehicle’s non synchronous pitch motion.
Key words:micro-suspended monorail; dynamic model; magic formula; shock; coupler force
Besides solving the problem of serious traffic jams in daily life[1-4], the monorail transportation has many advantages, such as a low turning radius and low noise[5-6]. There are two types of monorail: the suspended monorail with the car body suspended under the girder and the straddle monorail with the car body moving above the track beam. These two types of suspended monorail are widely used in the world. The Japanese bogie is more like the railway vehicle bogie; however, the German bogie is like an automobile. When solid tires are used in the German monorail, the suspension system is more complex. These days, China is devoted to the design of a new type of tour suspended monorail, namely the micro-suspended monorail, in which the bogie is as small as a toy.
The vehicle bridge coupling method, which is widely used in the world, can also be used in the dynamic simulation of the monorail[7-26]. Naeimi et al.[27]proved their assumption that the vehicle speed can affect the dynamic forces with the method of vehicle-bridge coupling dynamics. Meisinger et al.[28-29]studied the dynamic response of the vehicle-bridge system under the periodic excitation. As for the dynamic simulation of monorail, the dynamic deformation of the track beam is always ignored where the dynamic properties of the vehicle system are concerned[30-44]. Simulink can also be a good choice to set up the dynamic model for the advantage of manual modification[43-44]. With the method of multi-rigid body dynamics, a model of a 20 degree of the freedom micro-suspended monorail is set up in this research.
1 Tire Models
To benefit both calculation speed and accuracy, in this research, the Pacejka formula is used to construct the tire model[37].
(1)
whereY(x) denotes the longitudinal forceFx, side forceFyor aligning momentMz;Xdenotes the longitudinal creep ofFxor the sideslip ofFyandMz; andγis the camber angle.
The coefficients are functions ofFzand the camber angleγ.
As for the longitudinal forceFx, the coefficients of Eq.(1) is given as

As for the side forceFy, the coefficients of Eq.(1) is given as

As for the aligning momentMz, the coefficients of Eq.(1) is given as

The coefficientsa0,...,a15,b0,...,b10,c0,...,c17fitted with the test data is given asa0=1.3,a1=-22.1,a2=1 011,a3=1 078,a4=4.902,a5=0.022,a6=-0.354,a7=0.707,a8=0.029,a9=0,a10=0,a11=14.8,a12=0,a13=0,a14=0,a15=1.82;b0=1.65,b1=-21.3,b2=1144,b3=49.6,b4=226,b5=0.069,b6=-0.006,b7=0.056,b8=0.486,b9=0,b10=0;c0=2.4,c1=-2.72,c2=-2.28,c3=-1.86,c4=-2.73,c5=0.11,c6=0.03,c7=-0.07,c8=0.643,c9=-4.04,c10=0.03,c11=0.015,c12=0,c13=0,c14=-0.066,c15=0.945,c16=0,c17=0.
2 Track Irregularities
Like the traditional suspended monorail, the micro-suspended monorail’s track beam is also the box girder with an opening bottom, and the driving wheels and the guide wheels move forward along the inner wall of the box beam. In order to analyze the vehicle’s characteristics, the track beam is considered as a rigid body. The road irregularities are generated by the power spectral densityS(n) according to the following equations:
(2)
where Δsdenotes the step size, m;Nis the number of harmonics;nis the spatial frequency, cycles/m; Δnis the step size of frequency;n0is the minimal frequency;φiis the stochastic phase uniform distributed in [-π,π].
S(n) is the PSD function,
S(n)=Cnw
(3)
whereCandware constants.
The road irregularities of the micro-suspended monorail can be scaled by that of the level A road:
Z(sk)=az(sk)
(4)
3 Model Establishment
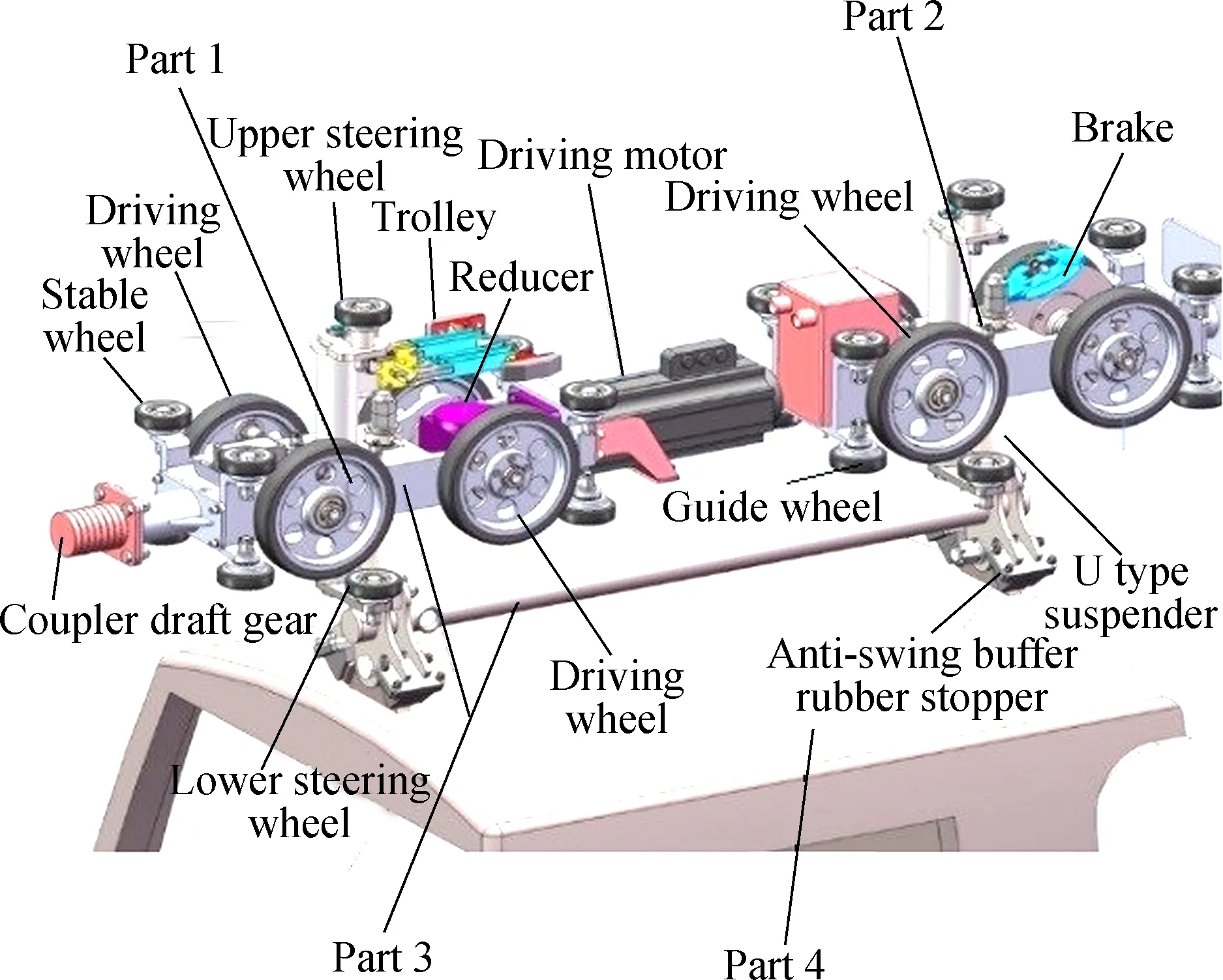
The dynamic model of the micro-suspended monorail consists of the track beams, two bogies, U type suspender and a car body. As shown in Fig.1(a), the power bogie is treated as part 1; the non-power bogie, part 2; the U type suspender, part 3; and the car body, part 4. Then, a 20-degree-model is established, as shown in Fig.1(b).
(a)

(b)
We can only verify the model theoretically due to the fact that this vehicle is still under the process of manufacturing. Two steps are required to verify the model. First, the static equilibrium of the model is calculated. If the vibration converges rapidly, it means that there is no error in the dynamic model. Secondly, the online simulation in Simpack is carried out. No strange vibration of this vehicle means that there is no error in this model.
Our simulation result is consistent with the design of the manufacturer, which means that our simulation is precise enough.
4 Analysis of Resonance Impact
The dynamic model is linearized. By solving characteristic roots, the natural modes of the vehicle can be obtained, as shown in Tab.1.
Tab.1 Vibration modes of the vehicle system

Mode of vibrationAW0AW3Frequency/HzDamping ratioFrequency/HzDamping ratioYawing mode of the rear bogie0.820.999 7481.400.999 247Yawing mode of the front bogie20.160.566 07720.160.566 079Floating mode of the front bogie62.080.466 44562.070.466 754Floating mode of the rear bogie74.800.661 97074.720.661 891Floating mode of the car body108.800.018 53883.570.013 589Pitching mode of the car body139.880.003 349103.360.000 311Yawing mode of the car body140.620.000 782103.660.000 783Rolling mode of the car body273.020.016 166209.830.012 342
According to the standard DBJ51/T099—2018[45], the Sperling index is the only index to judge the stability of the suspended monorail. The Sperling index, which is used to evaluate the vehicle’s ride comfort, can take into account vibration at different frequencies. Therefore, the Sperling index of a certain frequencyfican be obtained.
(5)
whereWidenotes the riding index;A(fi) is the vibration acceleration amplitude;fiis the vibrational frequency; andF(fi) is the weighted value of the Sperling index in the frequency domain
According to the standard[41], when the frequency is within the range of 1 to 10 Hz, the value of weight function of the Sperling indexF(f)/fis large, which means that the vibration in these frequencies can greatly affect the ride comfort of the vehicle. However, the natural modal frequencies of the micro-suspended monorail are not within that range, which indicates that the resonance will not have a great effect on this vehicle.
5 Analysis of the Vehicle Motion in a Curve
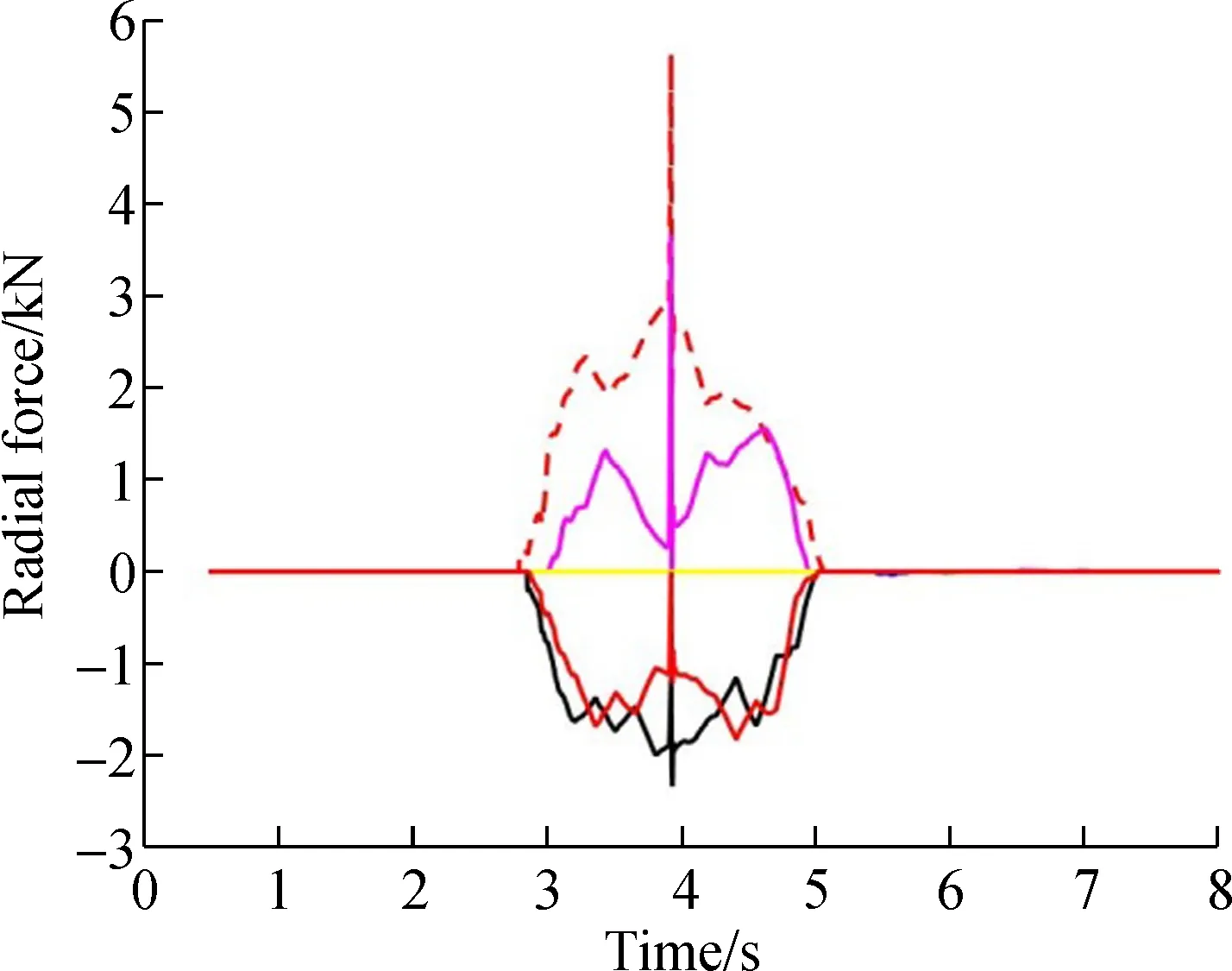
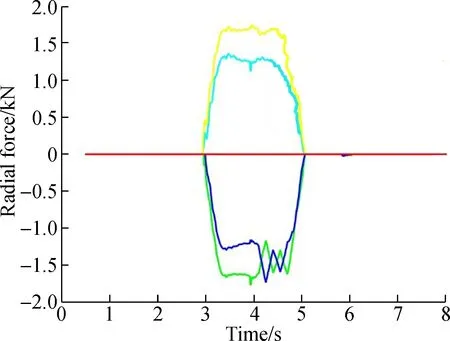
Through simulation, dynamic forces of the micro-suspended monorail can be obtained. The time domain responses of the tire forces when the vehicle passes aR12m curve at the speed of 10 and 15 km/h are shown in Figs.2 to 5, respectively. The radial maximum/minimum forces of the driving wheels are shown in Tabs.2 and 3, respectively. It is known that when the speed increases, the radial maximum force of the driving wheels also increases. As for the rear bogie, it can be noticed that, when the speed increases from 10 to 15 km/h, the maximum radial force of the driving wheels in the left of the rear bogie reduces a little and the maximum radial forces of the driving wheels in the left of the rear bogie increase.
Tab.2 Radial maximum force of the driving wheels
N

LoadAW0AW3PositionFront bogieRear bogieFront bogieRear bogie10 km/h15 km/h10 km/h15 km/h10 km/h15 km/h10 km/h15 km/hFront left619.91663.95512.24501.47933.705933.018857.830857.332Front right986.871 024.21730.12900.171 235.8101 388.940969.5411 229.350Rear left694.45735.69687.47682.311 072.9601 073.1801 089.5901 090.230Rear right979.231 093.69837.331 028.041 238.4501 447.2801 108.1601 439.730
Tab.3 Radial minimum force of the driving wheels
N

LoadAW0AW3PositionFront bogieRear bogieFront bogieRear bogie10 km/h15 km/h10 km/h15 km/h10 km/h15 km/h10 km/h15 km/hFront left000057.233 3060.492 90Front right265.078211.301126.661123.09681.063 781.081 960.722 760.668 6Rear left00103.494046.991 9066.949 60Rear right305.588301.482354.163315.07085.442 885.460 967.179 467.124 2
It can be demonstrated that, when the car passes a curve, the front bogie uplifts in the front left position and the left driving wheels derail. As for the rear bogie, the front left driving wheel hangs in the air when the vehicle speed increases from 10 to 15 km/h. However, the rear left wheel does not hang until the vehicle speed increases up to 15 km/h. It can also be learned from the figures that the forces of the right driving wheels increase but the forces of left decrease when the vehicle passes a curve, which shows that there is a rolling motion in the bogie.
As can be seen from Figs.2 to 5, when the vehicle passes a curve, the maximum radial force of the guide wheels and stable wheels in the front left and rear right of the front bogie increases, but the maximum radial force of the guide wheels and stable wheels in the front right and rear left of the rear bogie increases. The rest of the guide wheels and the stable wheels hang in the air for a long time, which means that there is also a yawing motion of the bogies.
The working condition of AW3 is similar, as shown in Tab.2 and Tab.3. This work is carried out to ensure the tire forces under different loads are not either too strong or too weak. The variation for driving wheel forces are larger than that of AW0 which means that the rolling motion is stronger. Besides, weaker minimum forces mean that the vehicle under this condition more easily derails.

(a)

(b)

(a)

(b)
(a)

(b)
(a)

(b)
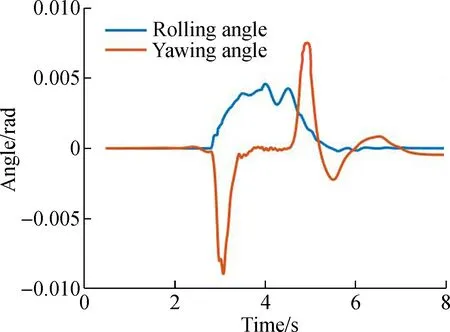
The stability of the vehicle when it passes through different curves is shown in Tab.4. When the radius of the curve becomes larger, the lateral stability of the vehicle improves. However, the vertical vibration of the vehicle does not change much. In order to prove the above speculation, the deflection angles of the vehicle when it passes a curve are also calculated, as shown in Fig.6. It can be learned from the figures that when the vehicle moves in and out of the curve, the yawing angle increases. When the speed increases from 10 to 15 km/h, the change of the car body’s yawing angle is not obvious. The vehicle’s rolling angle increases when the vehicle enters the curve. When the speed increases from 10 to 15 km/h, the maximum rolling angle of the car body increases greatly, which means that the car body rolls when the vehicle enters the curve. The higher the speed is, the more obvious the rolling motion is.
Tab.4 Sperling index under different working conditions

Working conditionAW0(R12m)AW3(R12m)AW3(R20m)10 km/h15 km/h10 km/h15 km/h10 km/h15 km/hLateral1.881 9593.123 2981.856 2633.131 4231.642 5012.726 874Vertical1.651 6281.162 1811.720 9581.199 3681.724 9611.152 487
(a)

(b)
When the vehicle moves in a right turn curve, it yaws in the clockwise direction. Under the action of the guidewheel (stable wheel) forces, the front bogie yaws clockwise while the rear one yaws counterclockwise. Moreover, the two bogies and the car body rolls during the vehicle passing a curve. When the vehicle speed is high enough, the left drive wheel will derail and the anti-overturning moments are provided by the stable wheels. Then, the car body yaws in the counterclockwise direction when it moves out of the curve.
6 Vibration and Shock Analysis
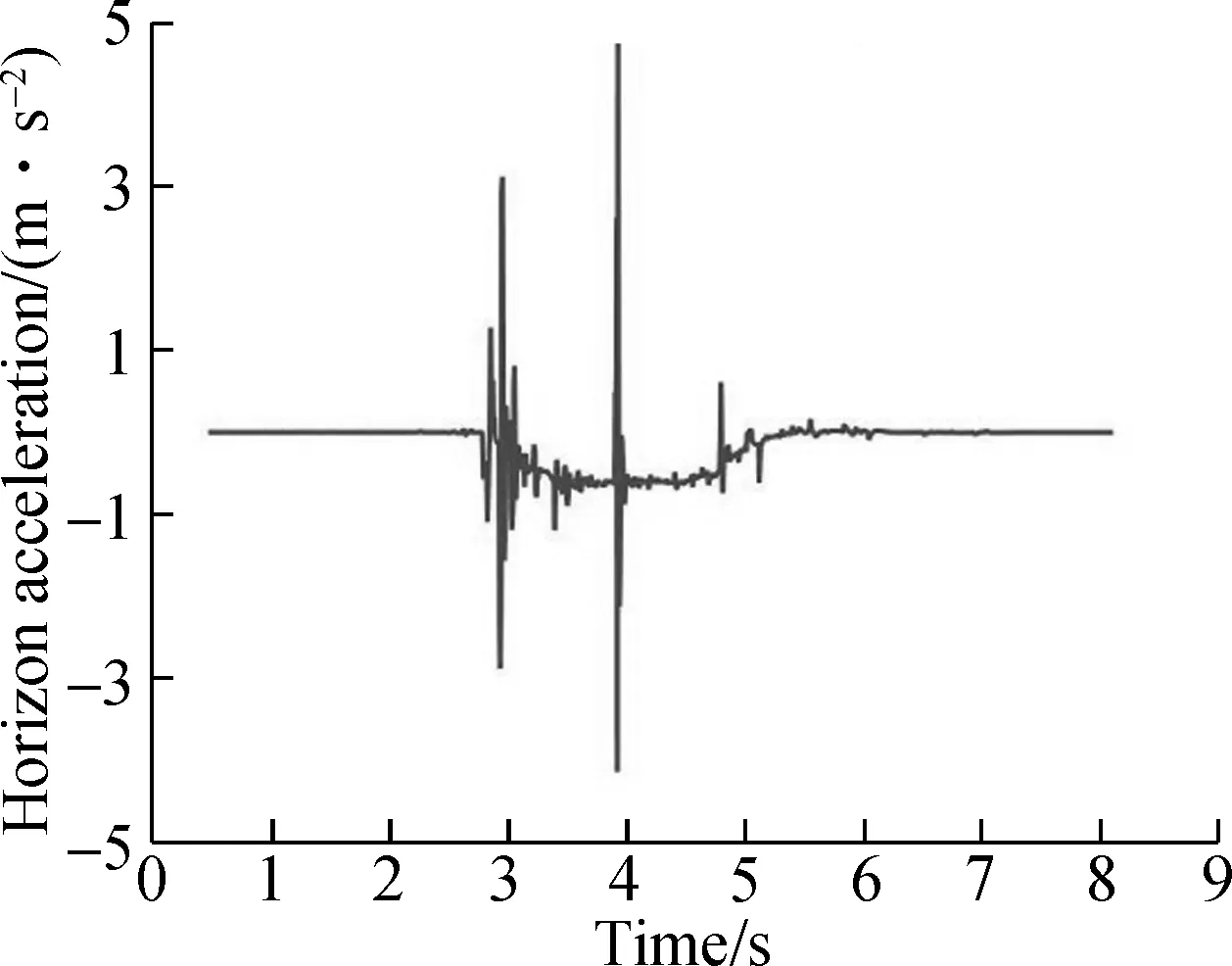
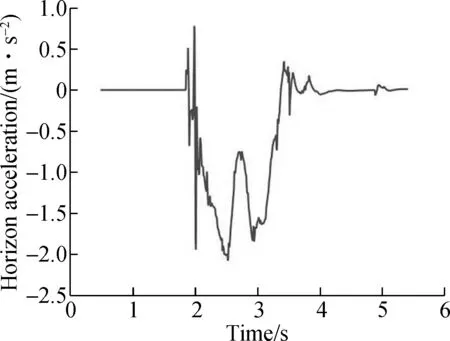
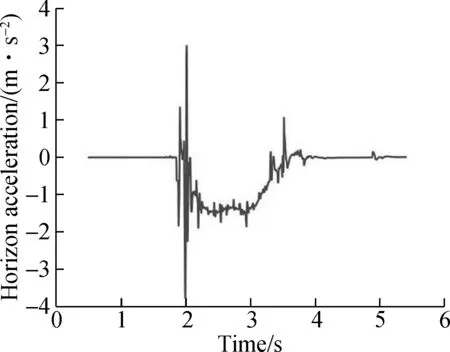
The simulation results of the accelerations are shown in Figs.7 and 8. The first/second positions denote the front/rear bogies, respectively. When the vehicle runs for about 4 s at the speed of 10 km/h, there is a lateral shock to the system. Due to the damping of the suspension system, the shock decreases when the micro suspended monorail travels from the frame to the U type suspender and then to the car body.
It can be seen from Fig.5 that the lateral acceleration increases when the vehicle speed is 15 km/h but the acceleration shock disapears.
It is known from Fig.3 that there is also a shock to the guide wheel forces when the vehicle speed is 10 km/h, which is caused by the wheel-rail collision. It is common in the running process of a traditional suspended monorail since there is a clearance between the guide wheel and guide rail surface. However, for the micro-suspended monorail, the shock will be fatal since the bogies are too light and easily overturned.
7 Detection of the Vehicle’s Crosswind Resistance
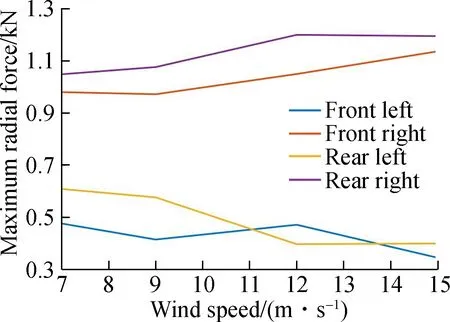
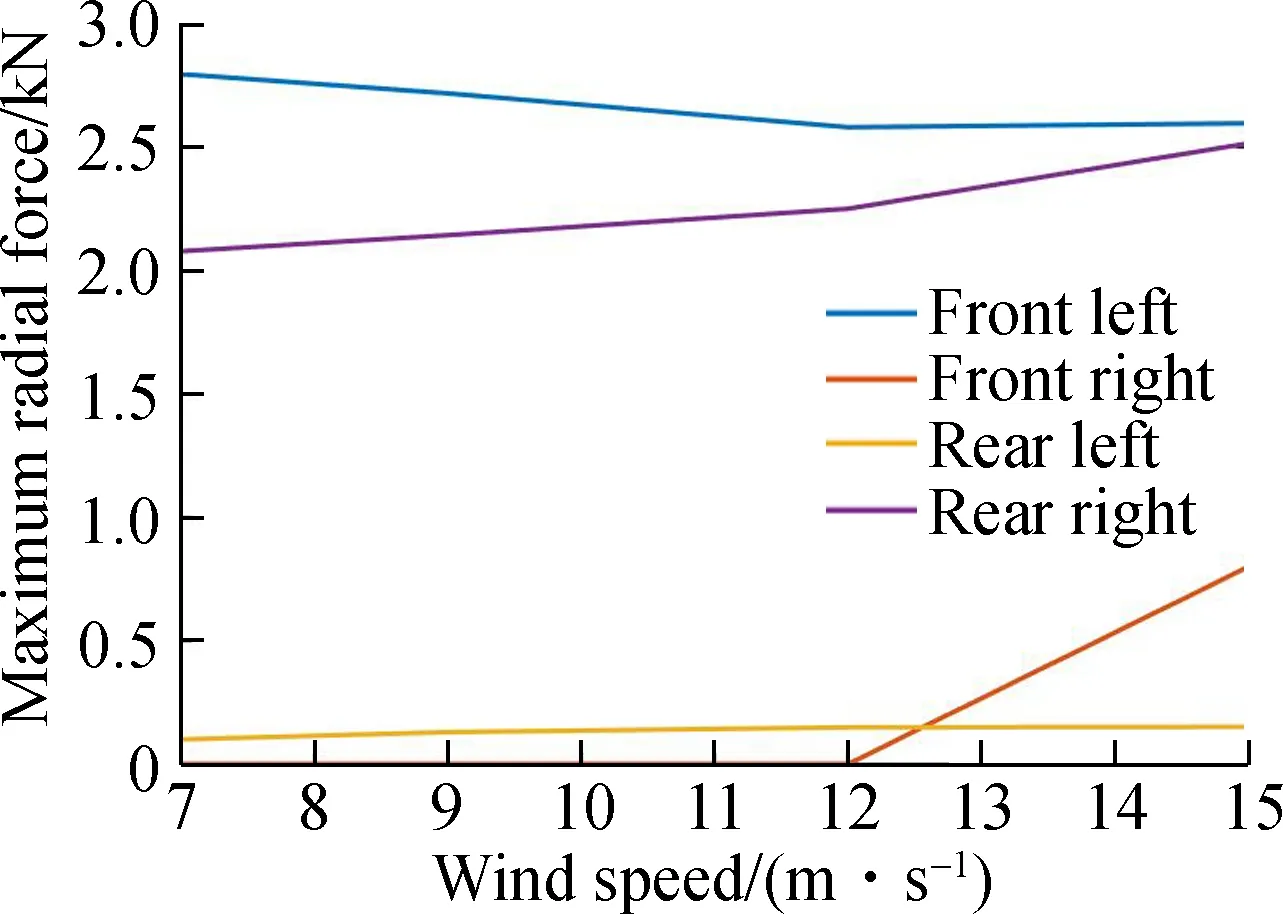
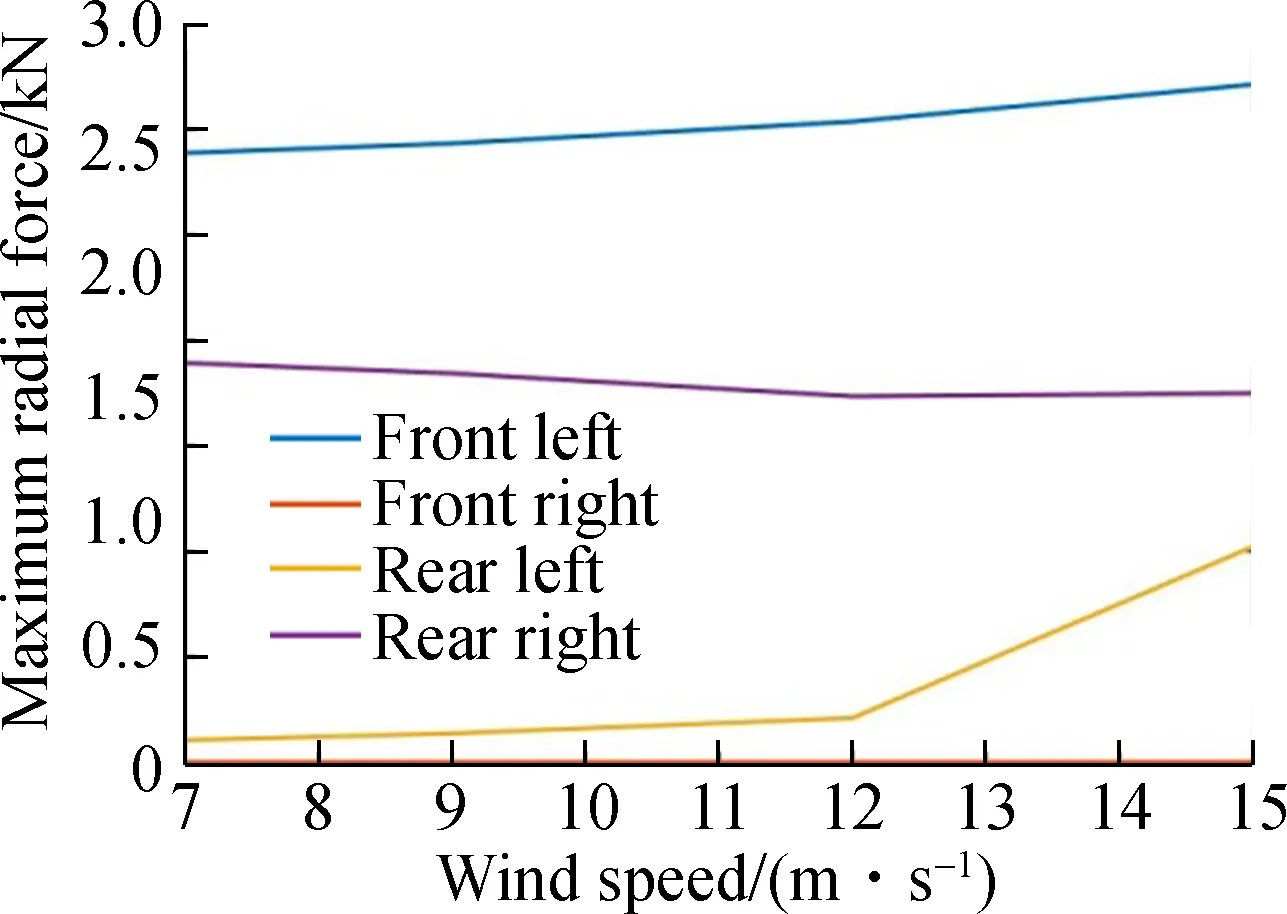
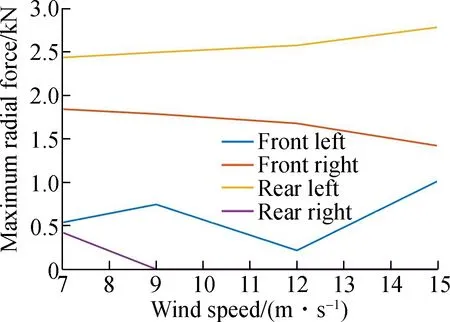
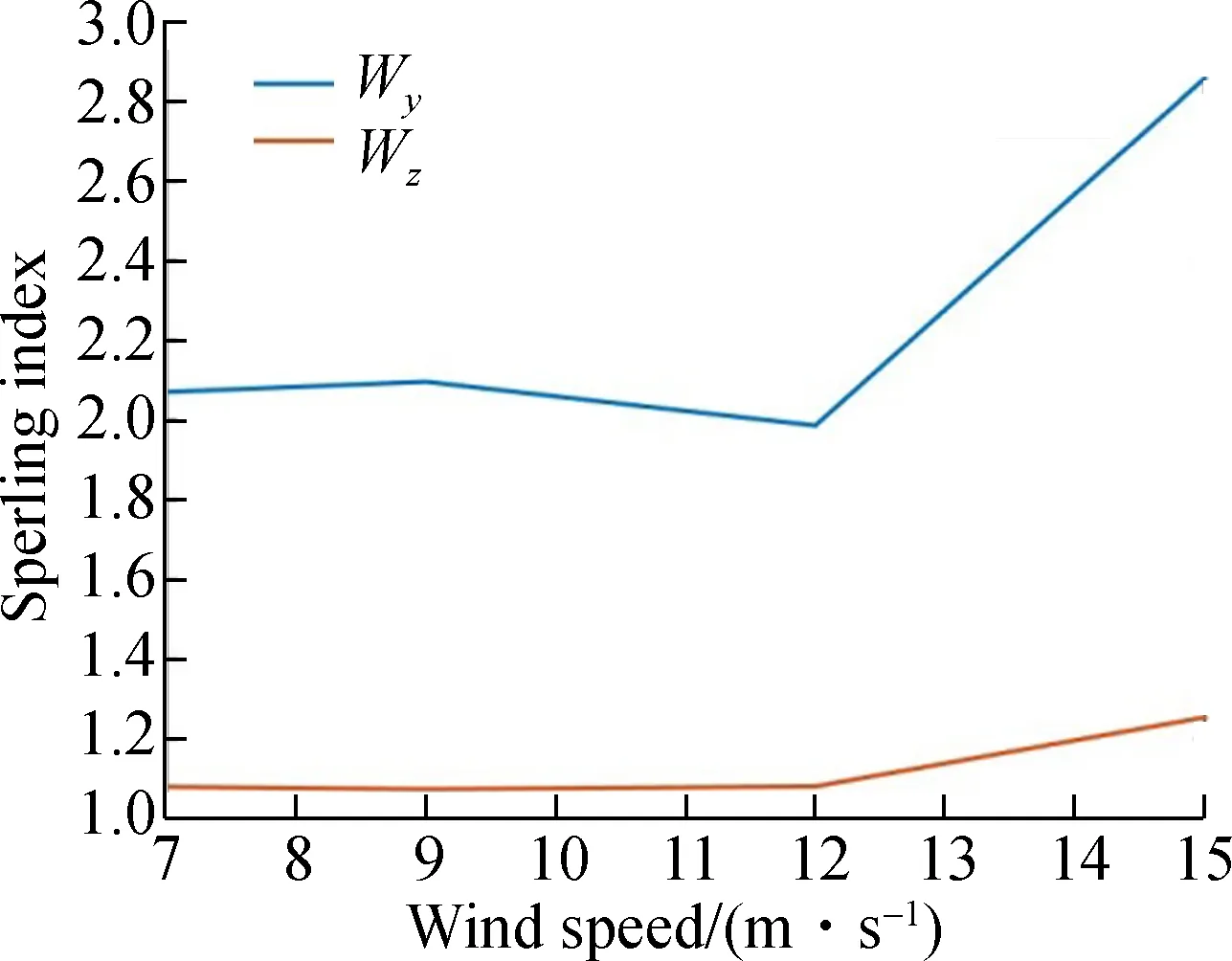
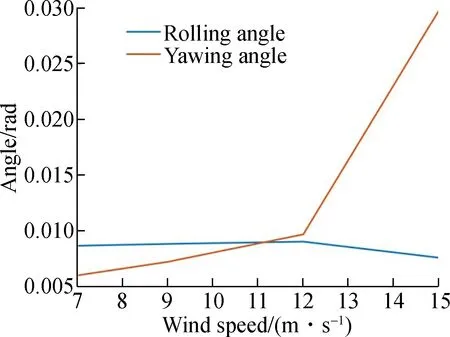
According to the Chinese standard GB 8408—2008, the micro suspended monorail vehicle cannot run when the wind speed is higher than 15 m/s. The simulation value of the crosswind wind speed ranging from 7 to 15 m/s is selected for simulation. According to the Chinese national standard CJJ96—2003, the wind load can be calculated. The maximum radial forces of tires under different wind loads can be checked when the vehicle passes theR12m curve at the speed of 15 km/h. The result is shown in Fig.9.
It can be seen from Fig.9 that the driving wheels will not derail under the action of the crosswind. It is known that the rear right guide wheel and front right stable wheel on the front bogie will make contact with the rail surface when the wind speed is above 10 km/h, but the rear right guide wheel and the front right stable wheel will derail. We also find that when the wind speed increases, the ride comfort index and the rolling angle generally increases, but the yawing angle decreases slightly. It can be known from Figs.9(c) and (d) that when the wind speed increases, the vehicle moves right and the guide wheels in the front right begin to make contact with the rail surface, resulting in some differences in ride comfort and deflection angle from previous ones. The yawing movement increases due to the new excitation from the guide wheel in the front right. It can also be learned from Fig.9(f) that when the wind speed increases, the stable wheel of the rear bogie derails due to the increase in the yawing movement.

(a)
(b)

(c)
(a)
(b)

(c)
8 Collision Simulation Between Two Cars
In order to analyze the collision between the two vehicles, we let the front car remain stationary and let the rear car hit the front car at the speeds of 10 and 20 km/h, respectively. The impact parts are the respective couplers.
This complicated process can be simplified as a coupling model of two vehicles. It is assumed that there is a force between the two vehicles, shown as follows:
(6)
wherexfdenotes the longitudinal coordinate of the rear coupler joint of the front vehicle;xris the longitudinal coordinate of the front coupler joint of the rear vehicle; andKcis the coupler stiffness.
(a)

(b)
(c)

(d)
(e)
(f)
(g)
(h)
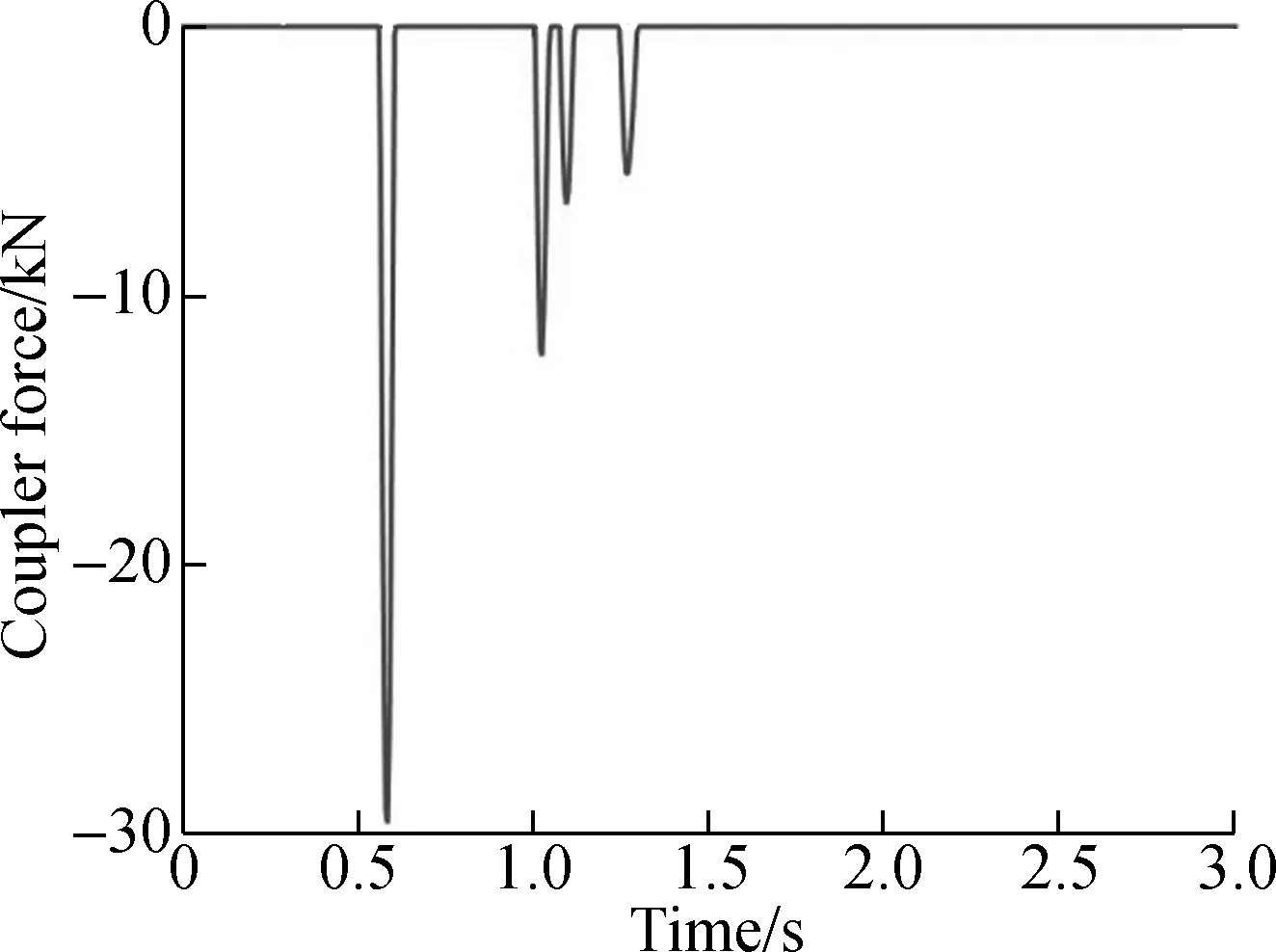
The results of the coupler force and pitching angle of the cars are shown in Fig.10.
It can be inferred from these figures that the coupler force is not a transient force but an intermittent force. When the two cars collide in one moment, pitching motion occurs in both cars. Both the rear parts of the front car and the front part of the rear car tilt up. The pitching motions of these two cars continue for a period asynchronously, making the couplers of these two cars collide several times. Then, the intermittent coupler forces are produced.
As is shown in the figures, when the rear vehicle hits the front one at the speed of 10 km/h, a 29 561 N coupler force is produced and the energy is dissipated by 3 times collisions. When the rear vehicle hits the front one at the speed of 10 km/h, a 44 474 N coupler force is produced. The pitching angle and coupler force of these two cars are much greater. Then, the energy should be dissipated by 4 times collisions.
9 Conclusions
1) Resonance can be avoided by avoiding external excitation at the main frequencies of every component. When the frequency is within the range of 1 to 10 Hz, the value of the weight function of the Sperling indexF(f)/fis large, which means that the vibration in these frequencies can greatly affect the ride comfort of the vehicle. However, the natural modal frequencies of the micro-suspended monorail are not within that range, which means that the resonance will not affect the vehicle greatly.
2) When the vehicle moves in a right turn curve, it yaws in the clockwise direction. Under the action of the guidewheel (stable wheel) force, the front bogie yaws clockwise but the rear one yaws counterclockwise. Moreover, the two bogies and the car body roll during the curve passing process of the vehicle. When the vehicle speed is high enough, the left drive wheel will derail and the anti-overturning moments are provided by the stable wheels. Then, the car body yaws in the counterclockwise direction when it moves out of the curve. However, the ride comfort of the vehicle is good. It must be noticed that the shock to the guide wheel forces caused by the clearance between the guide wheel and rail surface will be fatal for this type of vehicle since the bogies are too light. However, this type of vehicle will not be easily overturned by the crosswind.

(a)
(b)

(c)

(d)
3) The collision simulation of two vehicles shows that there is an intermittent coupler force between two vehicles. When the two cars collide in one moment, pitching motion occurs in both cars. Both the rear parts of the front car and the front part of the rear car tilt up. The pitching motions of these two cars continue for a period of time asynchronously, making the coupler of these two cars collide several times. Then, the energy should be dissipated by the collisions.
4) This paper is merely a preliminary analysis of this kind of monorail and much research concerning the improvement of the dynamic properties of this monorail type is needed in the future.
杂志排行

Journal of Southeast University(English Edition)的其它文章
- The walking distance decay law of amenity selection based on binary logistic model
- Evaluation of rutting and low-temperature cracking resistancesof warm-mix recycled asphalt bindersunder the secondary aging condition
- Effects of curing age on compressive and tensile stress-strain behaviors of ecological high ductility cementitious composites
- Dispersion of graphene in silane coupling agent aqueous solutions
- An explicit representation and computation for the outer inverse
- The cause of human fatigue and scenario analysisin the process of marine transportation