基于光电感应传感器的AGV控制系统的研究与探索
2020-05-07李琳
李 琳
(鹤壁职业技术学院, 河南 鹤壁 458030)
0 引言
AGV是Automated Guided Vehicle的缩写,意即“自动导引运输车”。AGV是装备有自动导引装置,能够沿规定的行驶路线,具有自我保护功能,自动准确的与装卸机构对接,具有各种移载功能的运输车[1]。
第一辆AGV诞生于1953年,AGV扮演物料运输的角色已经60多年。但随着物流系统的迅速发展,AGV的应用范围也在不断扩展,本AGV系统研究设计了一种基于光电感应传感器的无人驾驶小车系统方案。通过实际硬件实验,系统能够达到预期设计要求,能够广泛运用于工业、军事、交通运输、电子等领域,具有良好的环境适应能力,很强的抗干扰能力和目标识别能力。
AGV系统相对于传统的运输系统很好的解决以下几个问题:
1) 柔韧性问题得到解决
传统的磁导航、色带导航的柔性比较差,路径的改变需要重新铺设磁条、粘贴色带,人力成本就会增加,后期还需要一系列的维护费用。AGV控制系统很好的解决了柔韧性问题,维护费用也大大降低[2]。
2) 成本预算问题得到解决
制造业的核心问题是降低成本,赚取利润,而成本主要来自于人工、材料、制造费用。AGV控制系统可以很好的控制成本,使利润最大化,因此对企业来说性价比很高。
3) 精度要求问题得到解决
高科技行业对精度要求很高,单靠人力无法与自动装卸机构完美对接。AGV控制系统很好的解决了精度问题,因此有很好的应用前景。
1 基于光电感应传感器AGV的设计要求
AGV系统不仅为了解决柔韧性、成本、精度三个问题,同时也为了解决传统制造业技术落后的问题,设计的AGV系统要求实现以下功能:
1) AGV从流水线收到货物(行程开关检测)-仓库-人工卸货-按开始按钮-返回到流水线等待;
2) 来回路程:90 m,时间要求130 s,两个拐弯处;
3) 要求放二个工件,每个30 kg,共60 kg;
4) 速度、加速度等指标可以设置;
5) 充电由人工推到指定地点充;
6) 光电式检测,地下用胶带粘贴感应条。
2 基于光电感应传感器的AGV总体设计方案
基于光电感应传感器的AGV总体设计方案如图1。

图1 AGV总体设计方案
2.1 传感器
要想实现AGV的智能化,传感器的信息传递至关重要,传感器主要包括导向、速度和避障三种传感器[3]。各传感器在运行过程中执行各自的传感任务,其在AGV车中装配的位置和类型如图2所示。
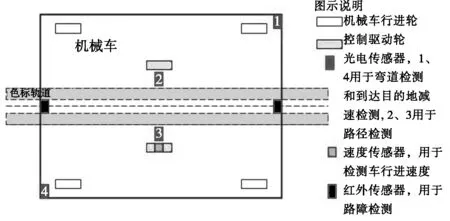
图2 AGV中传感器的配置和类型
2.1.1 速度传感器
在AGV整个控制系统中,主要测量旋转的运动速度,如果需要测直线速度一般通过旋转速度间接测量,输出电压与转速保持线性关系。
2.1.2 导向传感器
在本方案中导向传感器为光电传感器。光电传感器把变量转换成光信号,通过光电元件把光信号转换成电信号。光电检测具有速度高、抗干扰、非接触等优点,多参数同时测量,因其优势明显,光电传感器在自动化控制中得到广泛应用。
2.1.3 避障传感器
在本方案中采用红外避障传感器(以下简称红外)。红外具有一对收发器,发射器发射信号,当遇到障碍物信号反射,被接收器接收,传递到AGV主控模块,AGV主控模块经过分析处理,即可利用红外波的返回信号来识别周围环境的变化。该传感器对环境光线的适应能力比较强。
2.2 电源
电源单元实现5V/24V直流输入,通过电压转换满足硬件电路中所需的各级电压需求,为AGV的各个模块提供所需的不同电压的电源。
2.3 在线可编程与调试接口
该接口用于网络时间服务器开发阶段的编程与调试以及以后的软件升级。
2.4 警报
在AGV运行过程中,播放音乐用于避障提示等。
3 控制系统的设计
本设计的AGV主要使用红外线、转速和光电传感器。控制系统包括AGV的速度控制、导向控制与避障自我保护三个部分。下面对三个控制部分及所需传感器作简单介绍。
3.1 速度控制
AGV运行的速度靠电机的转速检测结果来推算。为了确保系统速度的稳定,采用电机调速控制。当速度不可控时,PID控制技术就成为首选,通过经验和调试来确定系统控制器的结构和参数,PID调节可用于直流电机控制器的算法[4]。(如图3)。

图3 控制原理框图
3.2 转向控制
工作过程中的AGV , 会因为外界的干扰产生运动路径的偏离, 因此必须通过转向控制保证运行方向的正确性。轨道检测方法欲采用有线式导向方法中的光电传感器,目前预选用FR 20 RG-PSM4。通过差速对小车进行转向控制。通过两个光电传感器的监测结果,可以对两个直流电机进行增减速切换控制,但如果切换频繁会导致单位时间内进行纠偏转向控制的次数和幅度过多,引起AGV摆动, 甚至转向振荡。因此,本设计在转向控制当中欲采用Fuzzy模糊控制的手法,通过对调控量与震荡频率的传递函数的学习,来生成能够进一步保证AGV稳定性的控制器。在转弯处,通过光电检测来预先进入转向状态,通过预测前馈控制与转向反馈控制的结合来保证AGV按轨道转向[5]。
3.3 定停控制
在货物搬运过程中, AGV 应能在所要求的工位或货位上与装卸机构自动准确对接。装配的配合精度是一项很重要的参数,而装配精度取决于定停精度,定停精度受控于导向和相关控制技术。本设计当中的定停将采用光电传感器来检测出停止标志,开始执行停止命令,同时辅以转速传感器的数据反馈来推测制动距离,从而完成高精度定停控制[6]。
3.4 避障保护
安全避障模块用于识别障碍物并通过躲避对自身进行保护。本系统要求小车在距离障碍物90cm的位置开始减速或停车,躲避障碍物。前面提到的红外传感器作为避障传感器,在AGV的前部和后部各安装一个。通过电压信号辨别距离的远近,电压信号输入主控制模块,当检测到距离障碍物90 cm时速度减慢同时报警,当距离小于35 cm时小车停车。
4 主控板设计
主控板结构如图4所示主要由转速传感器接口、电机驱动接口、红外线传感器接口、光电传感器接口、波形整形单元、显示驱动单元、液晶显示屏、音乐单元、扬声器接口、矩阵键盘、键盘接口单元、启动停止按钮和微控制器(MCU)等组成[7]。
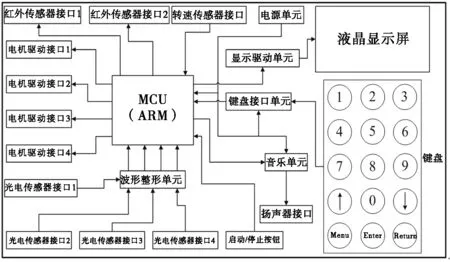
图4 主控板结构
◆电机驱动接口:设计中提供了四个电机驱动接口,两个供目前使用,另外两个供以后扩展功能使用。
◆显示驱动单元:显示驱动单元负责为显示系统提供驱动信号。
◆液晶显示屏:液晶显示屏显示人机交互的相关信息。
◆音乐单元:音乐单元负责产生提示音乐。
◆扬声器接口:扬声器接口负责连接扬声器。
◆矩阵键盘:矩阵键盘提供0-9的数字键和相应的操作按键,方便用户进行参数设置等人机交互。
◆启动/停止按钮:启动停止按钮负责启动和停止小车工作。
◆微处理器(MCU):微控制器主要处理传感器信号、控制算法、按键的信号处理等。
5 软件体系设计
5.1 人机交互设计
人机交互的软件部分主要负责对用户的按键进行识别并作相应的处理、同时在液晶显示屏上显示相应的提示。在用户进行参数设置时,可以显示相应的参数设置菜单和参数的设置值、用户可用上下箭头按键移动、用Enter键进入相应的菜单、用数字键设置相应的参数。设置完之后可通过Menu键使设置的参数生效。
5.2 控制算法设计
控制算法主要根据各传感器感知的信号采用PID控制算法,控制两个驱动电机的转速以及启动停止等工作状态,同时在检测到障碍物时能够停止并进行报警。
6 结束语
本文提出了一种基于光电传感器的AGV系统的设计思路,通过该设计实现相关功能。伴随着工业4.0时代的到来,AGV行业发展前景光明,尤其是对人体有害的工作环境。AGV技术已经渗入到我们的日常生活中,凭借其自身的优势,将会得到越来越广泛的应用。
