基于STM32单片机智能伺服型黑板擦
2020-05-06张家源王其申常雪娇马惜平
张家源 王其申 常雪娇 马惜平
摘 要:本设计基于STM32单片机,设计了自动伺服黑板擦。系统由信息控制处理模块、驱动设计单元模块、电路电源模块、粉尘收集模块等,使擦黑板环节更高效,环境更洁净,师生更健康。随着计算机网络科学、多媒体、人工智能等相关技术的出现与普及,为了满足广大师生对于教学设施更为符合人性化设置的高端教学需求,众多与教育相关的教学设备例如智能黑板等进而被发明和产生, 这是新技术发展的趋势及方向所致。但是现有的高端教学设备有着成本高,智能性差的缺点,特别是还存在工程量较大的问题,难以进行普及,为此我们从体积小巧的黑板擦入手,进行改进与创新。
关键词:黑板擦 STM32单片机 伺服驱动 激光识别 粉尘收集
1 产品研究内容
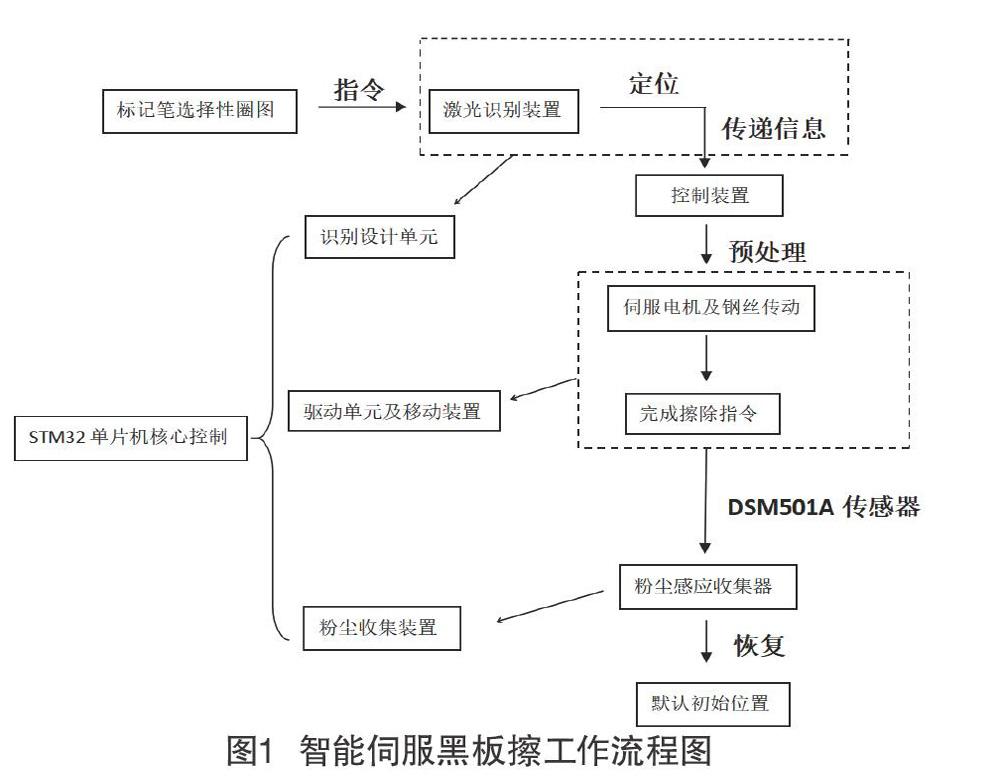
智能伺服型黑板擦主要是由驱动装置,控制装置,粉尘收集装置,激光识别控制装置四部分组成。系统以STM32芯片为控制核心, 采用DSM501A传感器测量PM2.5、DHT11传感器测量温湿度、伺服驱动器驱动伺服电机控制黑板擦运动,各装置模块分行其职,配合紧密,共同完成擦除工作(见图1)。
使用者只需用特定的标记笔在黑板上的擦除区域进行选择型圈图,系统通过激光识别装置在黑板上定位,会将擦除区域信息传送至信息控制处理模块进行预处理,再将处理好的信息通过主控电路传送至驱动装置模块,然后便对黑板的特定区域进行擦除,工作的同时粉尘收集装置会对杂质粉尘进行收集。擦拭结束后,智能黑板擦能根据预先设计的程序恢复到黑板左上角的默认初始位置。
2 系统硬件设计
2.1 识别设计单元模块
黑板边缘处的X,Y轴能将黑板分割成无数个云点,用于识别设计单元模块进行定位。运用测距原理测量光往返目标所需要时间,然后通过光速c=299792458m/s和大气折射系数n计算出距离D。激光光束通过黑板边缘处特定装置的调制经过电子装置发射出来,遇到高速率旋转的粒子时能在光学棱镜表面发生反射,最后以一个特地的角度α返回黑板表面,这样就通过光学信息完成了对黑板表面的实况采集。
2.2 信息控制处理模块
STM32微控制器是一款集成电路芯片, 包括一系列结合高性能以及低功耗和低电压操作的32位产品, 具有高集成度和易于开发的特性。STM32具有集成嵌入式闪存SRAM存储器和ARM Cortex-M3内核, 可与所有ARM工具和软件兼容。信息控制处理模块以STM32芯片为控制核心, 能够高效精准地完成所有信息输入的处理以及指令的输出,兼顾保持信息的完整性。
2.3 驱动设计单元模块
驱动设计单元模块通过接收STM32单片机中信息控制处理模块处理过的信号信息,传至伺服驱动器组中完成对黑板的擦除等工作。模块中伺服驱动机组由三个驱动机组成,分别控制着黑板擦在黑板这个三维空间上的每一个动作,X,Y轴方向的伺服电机主要负责在黑板平面上确定运动在要擦除的点,而Z轴上的伺服电机则负责在对应擦除的区域放下黑板擦粉尘收集装置,对定点擦除区域进行擦除和粉尘的定点收集。之后通过激光识别设计单元对擦除区域的识别,将信息传送至信息控制处理模块,若判断已经擦除干净,则返回在黑板左上角的默认初始位置,否则对擦除区域进行二次擦除和粉尘的收集。
2.4 电路电源模块
电路电源模块能够针对不同去向的电能通过接入出口端的智能伺服变压器变压,其中激光定位装置,伺服驱动装置,粉尘收集装置经过变压后,可以达到对应装置的额定电压,从而使整个智能黑板擦系统有一个完整的能源动力。智能伺服变压器的工作原理可以归结为利用伺服系统的闭环和半闭环控制,通过智能传感元件对负载进行动态跟踪,自动监测伺服驱动器的功率、电压、电流,实现伺服电机需要多少能量,伺服变压器就输出多少能量,进而达到节能降耗。
2.5 粉尘收集模块
粉尘收集模块由DSM501A传感器和特制的黑板擦头两部分组成。DSM501A传感器利用激光散射原理连续采集数据 (每隔1 s采集1次) 并计算单位体积空气中浮物颗粒的个数, 再将其换算为浓度, 然后将浓度的数字信号转换为电信号输出, 实现对空气中物质浓度的监测,从而检测是否完成擦除指令。黑板擦头采用四个“U”型设计的小擦头来配合灰尘吸收器完成擦除吸收灰尘等工作,小擦头使用滚筒海绵清尘技术,灰尘吸收器则应用纳米级过滤器。它不同于传统的平面擦头,四周多采用胶垫内嵌式设计,从而缓轻噪音过大和灰尘扬起带来的问题。此外,在整个装置的中央底下还放置有一个粉尘感应收集器, 用它和单片机相互协同配合,能够高效完成灰尘的收集与清除,使黑板面更洁净。
3 应用及特色
本智能伺服黑板擦的特色显著,具体体现在:第一,产品主体中心运用STM32作为其处理器,并兼用激光定位装置,对于问题处的识别能变得更加高效,且相对于摄像头来说成本占优;核心芯板体积小巧,功能强大,具有容错率和可操作性,同时易于更换。第二,动力方面依靠伺服驱动和钢丝绳传动为核心的机械系统:电源电路模块通过变压能够确保黑板擦的伺服电机稳定在额定工作电压,从而提供完整的动力支撑;机械传动装置的辅助作用保证了产品运作的精确性,零件之间的配合协调能使整个流程更加流畅。第三,传统黑板擦带來的灰尘扬尘往往会给师生附加健康隐患,污染教室环境。本产品内设的灰尘吸附模块,能及时清理擦拭过程中产生的粉笔灰尘,从而最大限度地减少灰尘对师生健康的影响;擦板能够用于储尘的容量大,因而不需要频繁更换,通常一周更换2~3次即可。
本产品定位更加准确、成本更加低廉,且使用更为方便,可在大中小学实现普及,有一定的推广意义。
4 结语
对于智能课堂的完整实现,我们一直在考虑如何从较小的细节方面入手,黑板擦虽不是舞台的主角,但它也在这场“演出”中扮演了举足轻重的角色。大可不必实现类似全自动智能教学那样满含技术高度的效果,这样反而会暴露出工程量浩大,推广时间冗长等现实问题,一个小小黑板擦,便能为教学过程带来该有的便捷。
参考文献
[1] 范春平,涂继亮.基于51单片机的全自动黑板檫粉尘清除装置设计与实现[J].科技广场,2016(7):176-178.
[2] 何晓飞,叶小飞,楼剑阳,等.电动吸尘黑板擦的设计与研究[J].电子制作,2016(12).
[3] 刘凌,王恒,周少勃.智能黑板擦控制系统研究 [J].微型电脑应用,2018(9):14-16.
[4] 吕晓彬,王志凌,梁贵龙,等.基于STM32控制器的智能黑板擦系统设计[J].盐城工学院学报:自然科学版,2018(1):37-41.
[5] 张圆月,罗吉安.自动定位无尘黑板字迹清除系统[J].内江科技,2019(6):32-33.
