基于智能PID的直流电机控制算法仿真分析
2020-05-06罗娜,朱江,李燕
罗 娜,朱 江,李 燕
基于智能PID的直流电机控制算法仿真分析
罗 娜,朱 江,李 燕
(昆明物理研究所,云南 昆明)
近些年来由于连续变焦等新型伺服控制技术在红外成像中的应用,对于直线位置伺服控制系统的要求日益增高,提高其控制速度与控制精度已经成为当前一个热门课题。在直流电机伺服控制系统中,由于被控对象的非线性以及不确定性,传统PID(Proportion Integral Differential)控制在应对不同的工况变化时,其参数调整不及时,自适应能力差。针对这种情况,本文提出一种智能PID控制策略,将前馈与模糊PID结合起来形成复合智能控制,通过仿真实验进行验证,证明了此控制策略具有响应速度快、超调量小、自适应能力强的特点。为直流电机伺服控制系统的设计提供一定的参考。
伺服控制;直流电机;智能PID控制;响应速度;超调量
0 引言
直流电机调速方便并且精度较高,在实际工程中直流伺服电机的闭环控制精度可达到0.01mm,而且在长距离(几十甚至上百毫米)、大负载的直线位置控制应用中加减速度快、有较大力矩、定位精度高,表现良好,因此直流电机的使用越来越多。在控制电机的算法中,国内外相关研究人员采用的最多的方式为传统PID(Proportion Integral Differential)算法,因为传统PID算法具有算法简单、稳定性好和精度较高的优点,但其所能体现的优点建立在被控对象必须具有准确的数学模型的基础上。而在实际工程中被控对象不可能是一个理想模型,伺服系统中的机电扰动和环境干扰是复杂的,难以有具体准确的数学模型,这就导致传统PID在这种工程中不能充分发展其优良性。针对这种情况,近些年国内外专家学者积极研究智能控制算法,如:自适应PID算法、模糊PID算法、神经网络PID算法,并应用在实际伺服控制系统中,但这些算法也存在一些不足,比如响应速度较慢,超调量较高等等。在此背景下,本文研究了一种智能PID算法,将前馈控制算法与模糊PID控制算法结合起来,目的是提高控制算法的响应速度与控制精度,为高精度伺服控制系统的设计做准备。
1 直流电机伺服控制系统的数学模型
直流电机伺服控制系统的组成如图1所示,主要由微控制器、电机、被控对象以及反馈装置组成。
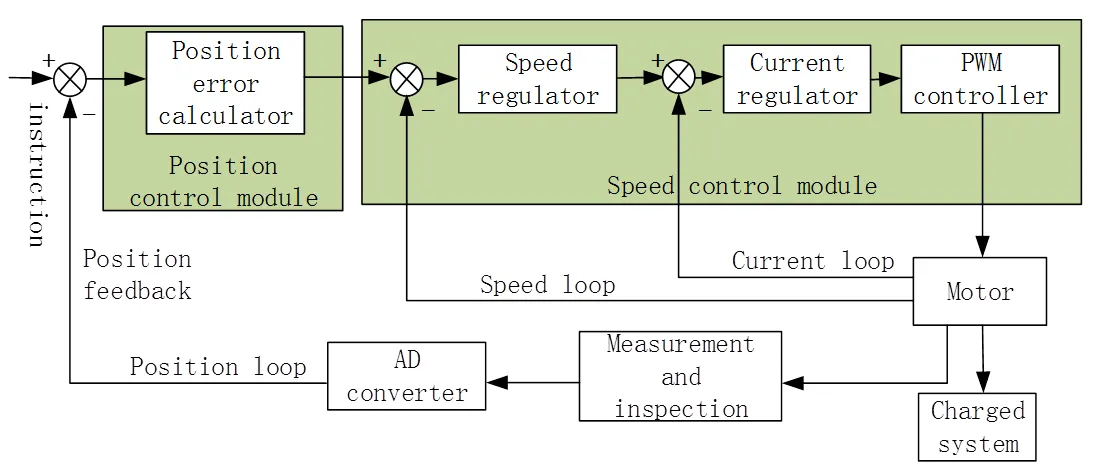
图1 直流电机伺服控制系统结构图
其中电机和负载的等效线性模型如图2所示[1]。
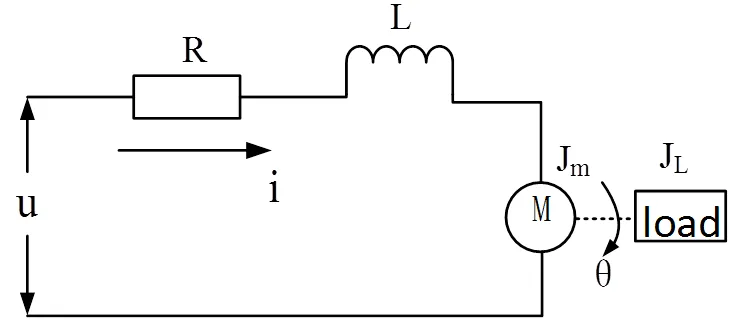
图2 电机与负载等效模型
本文所选电机的主要性能参数如表1所示。
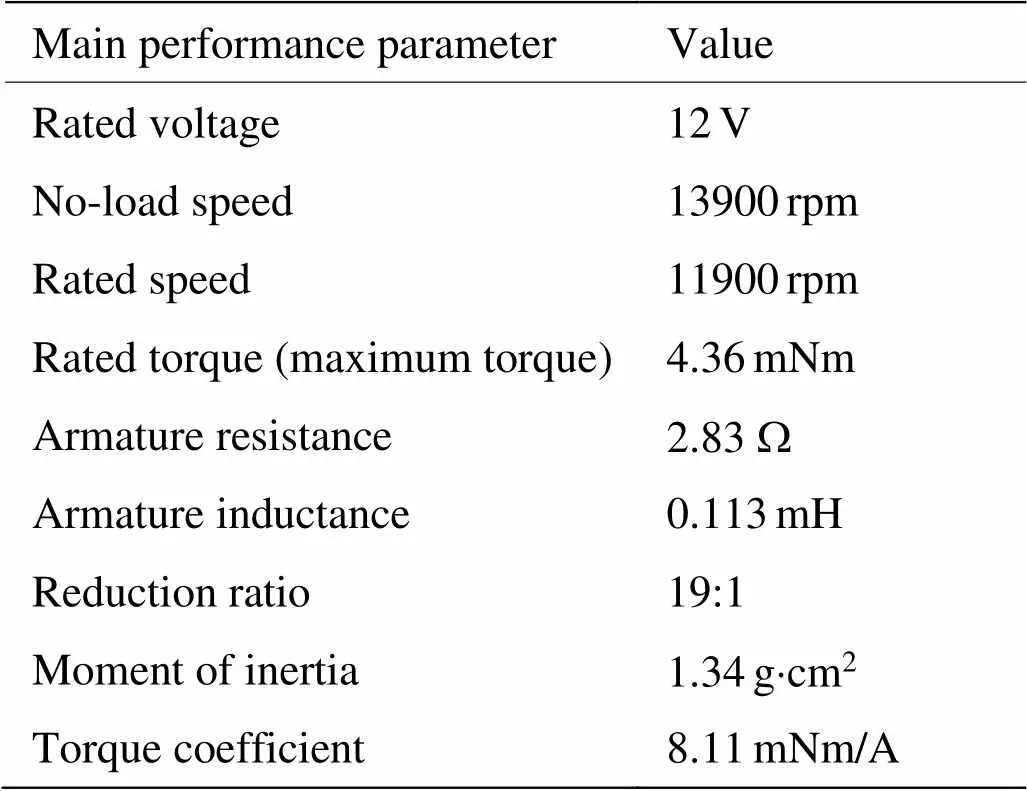
表1 电机与减速头主要性能参数
根据自动控制理论可以求出电机与负载的传递函数为:
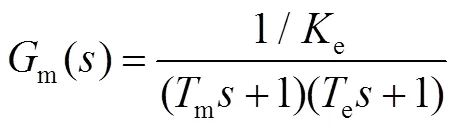
经过计算可以大致得到电机与负载的线性传递函数为:

2 智能PID控制算法研究
2.1 原理分析
在实际控制系统中由于结构加工精度、温度变化、电路噪声等不稳定因素,会给伺服控制系统带来干扰,在干扰的作用下,经典的PID反馈控制系统是在被控量的输出值偏离给定值后才根据偏差值的大小起到控制作用。若扰动始终存在,而系统总是跟在干扰之后作用就不可避免地使系统存在稳态误差,影响控制精度。而前馈控制就是根据扰动量的大小提前进行校正。所以将前馈与反馈控制结合起来既可以同时发挥前馈与反馈的优点,又可以降低系统的稳态误差。
而模糊PID是将模糊控制思路加入到传统PID中,不要求被控对象具有准确的数学模型,只要根据工程及专家经验适当地在传统PID的基础上加入模糊控制规则,就可以根据反馈值与给定值之间的误差值以及误差的变化率自适应地调整PID的3个参数使其达到理想状态[2]。尤其是对控制系统使用过程中遇到的问题有很好的自适应能力,如突然的扰动、温度变化引起变化、器件用久的磨损。
本文将前馈控制与模糊PID控制结合起来就可以同时发挥两者的优点,既可以提高系统的响应速度、控制精度,又可以提高系统的自适应能力。
前馈与模糊PID结合起来的复合控制框图如图3所示。即将模糊PID控制[3]与前馈控制并在一起加在被控对象的前端。
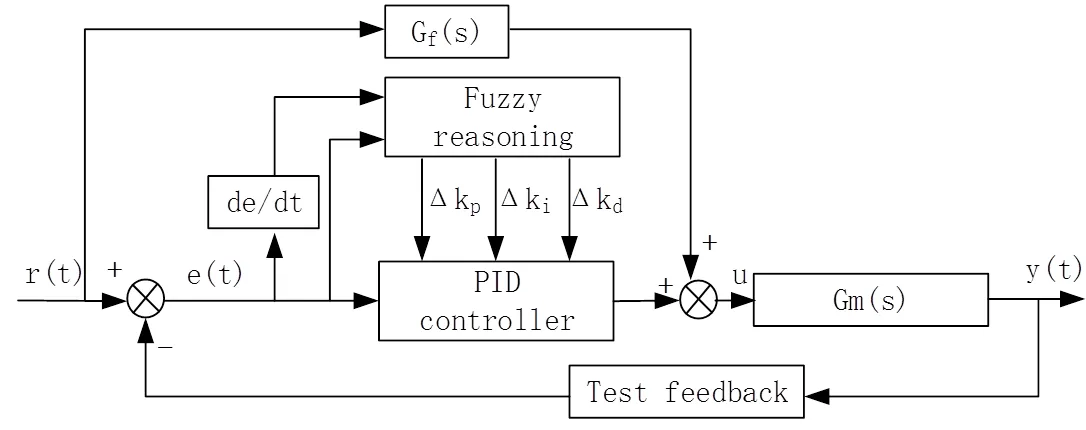
图3 前馈+模糊PID控制算法框图
其中前馈函数如下式所示[4]:
(3)
模糊控制器的输入为误差()与误差变化率c(c=d/d),输出为参数调整量Dp、Di、Dd,其属于7个模糊子集,即PB(正大)、PM(正中)、PS(正小)、ZO(零)、NS(负小)、NM(负中)、NB(负大)[5]。为使系统的性能能够达到最佳状态,根据工程经验制定如下模糊规则,见表2。
模糊PID控制器参数为下式所示:
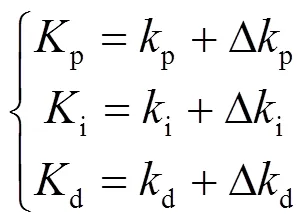
式中:p、i、d分别为PID controller的初始比例、积分、微分参数。
2.2 智能PID直流电机控制系统仿真
根据上一章智能PID的模糊控制规则进行仿真模块中模糊推理模块的设计,其中()与误差变化率c采用gaussmf模型,论域为(6 6)模糊推理器的输出量Dp、Di、Dd,采用trimf模型,论域为(3 3)按if…and…then…的形式建立49条模糊规则[6]。
将设计好的模糊推理模块与PID控制器连接起来,并加上前馈控制。PID控制器的控制参数取值为:p=200,i=175,d=1.7,其复合控制算法的仿真框图如图4所示。
2.3 仿真结果分析
其仿真结果对比传统PID、加入前馈的PID、模糊PID、复合智能PID控制的阶跃响应曲线,仿真结果如图5所示,其中5V处的平行细实线为方波信号,从左至右分别为虚线代表前馈PID的仿真波形、点划线代表经典PID仿真波形、粗实线代表复合智能PID控制的仿真波形、点线代表模糊PID仿真波形。
从图5中可以看出前馈PID控制的响应速度最快,但是其超调量较高,而超调量最低的是复合智能PID控制,虽然其响应速度稍慢一些,但是其响应速度也可以达到0.03s,可以满足一般伺服控制系统的速度需求。
对于控制算法的自适应能力测试,在仿真5s后加入阶跃信号,作为外部干扰,其仿真结果如图6所示。
从图6可以看出,在系统突然有了扰动之后,各控制算法都会有一定的反应,其中传统PID在调整过程中会产生过调,而前馈PID调整时间过慢,模糊PID虽反应时间较短,但其振荡有些严重,效果最好的就是复合智能PID控制,其调整速度较快,无过调,并且自适应过程比较平稳。但是复合智能PID控制存在的一个问题,如图7所示,其仿真中的误差无法很快收敛到0,但是可以在0.03s内收敛到0.003数量级内,仍符合大多数伺服控制系统精度的需求。
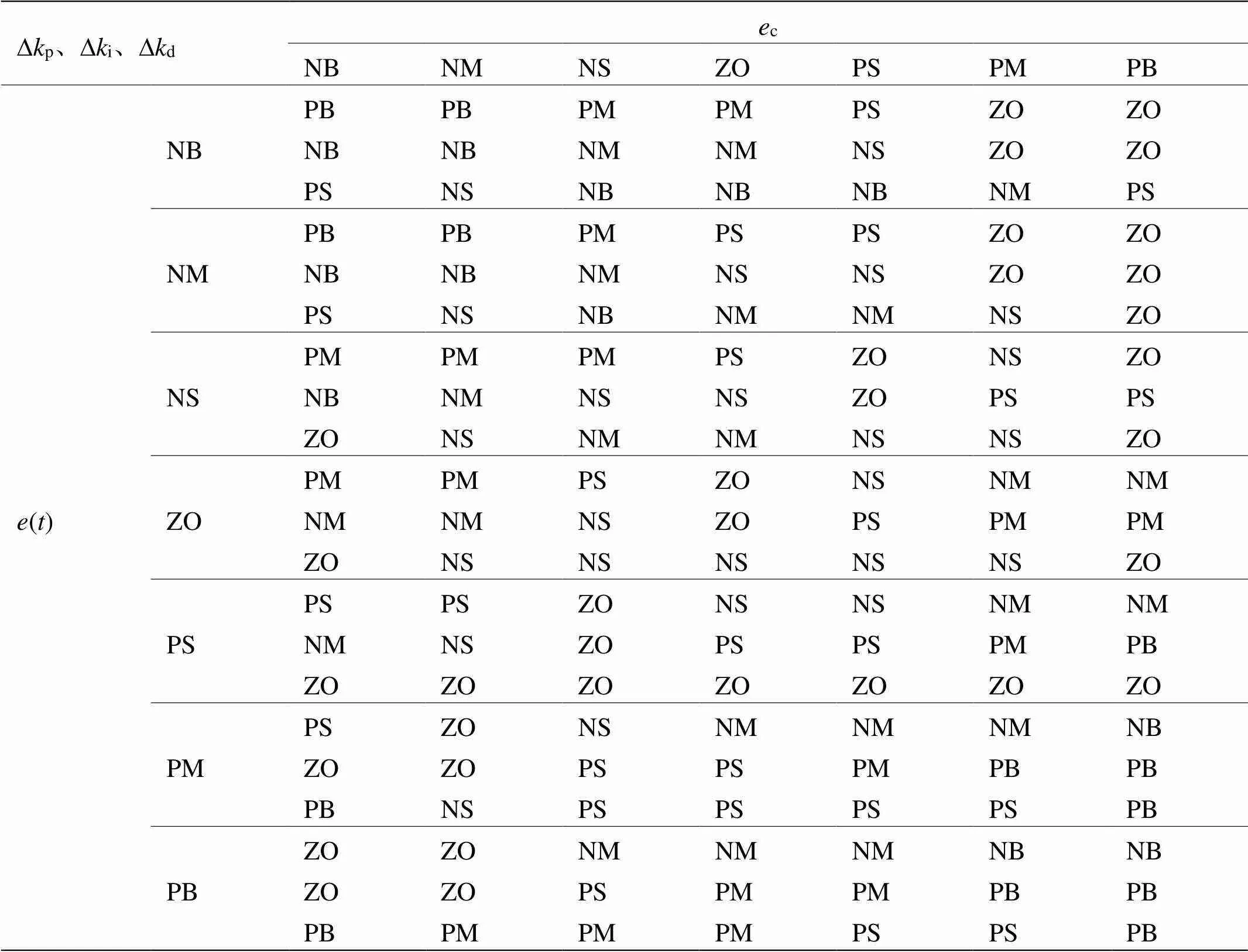
表2 PID模糊规则推理表
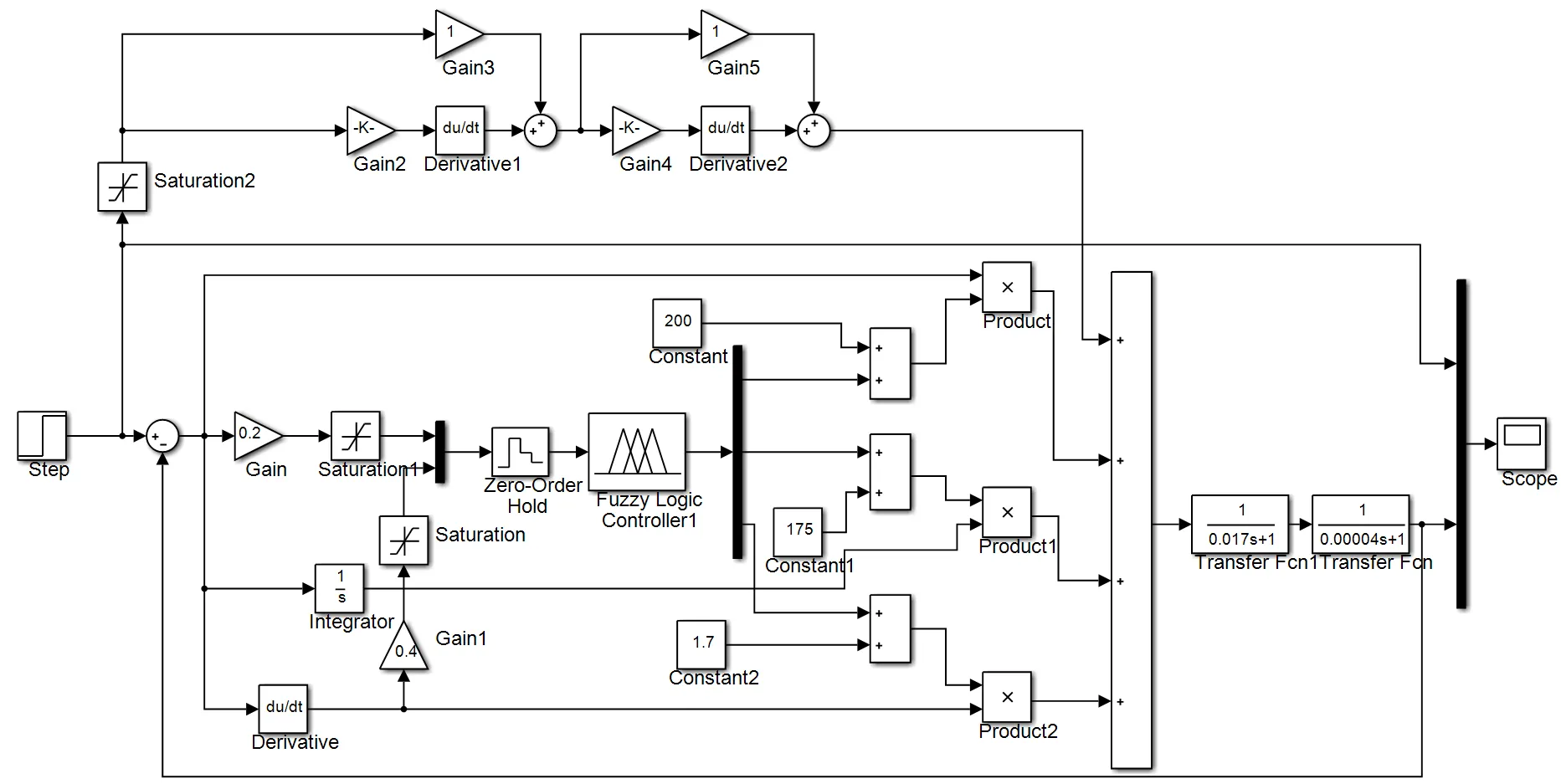
图4 复合智能PID控制仿真模型
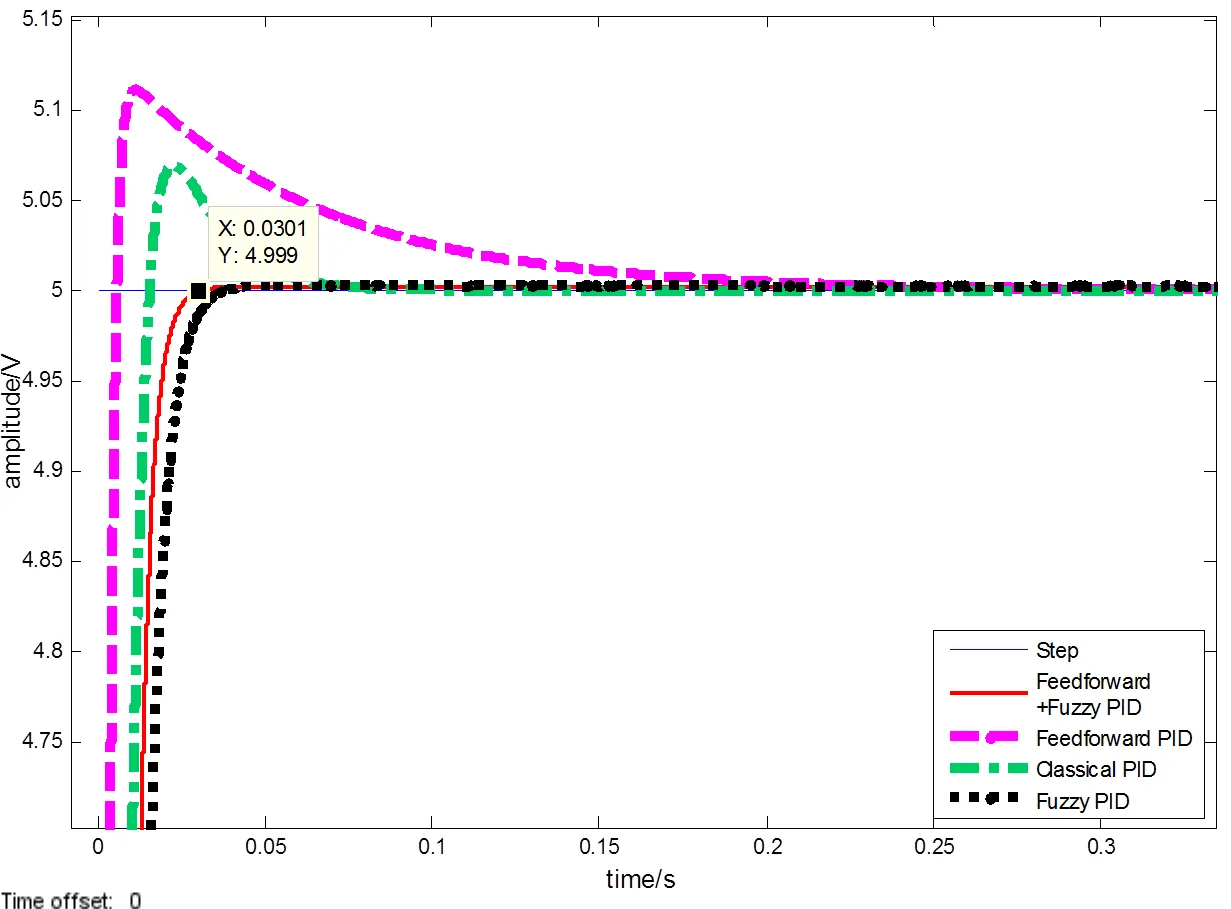
图5 复合智能PID控制仿真结果

图6 5s处自适应仿真结果
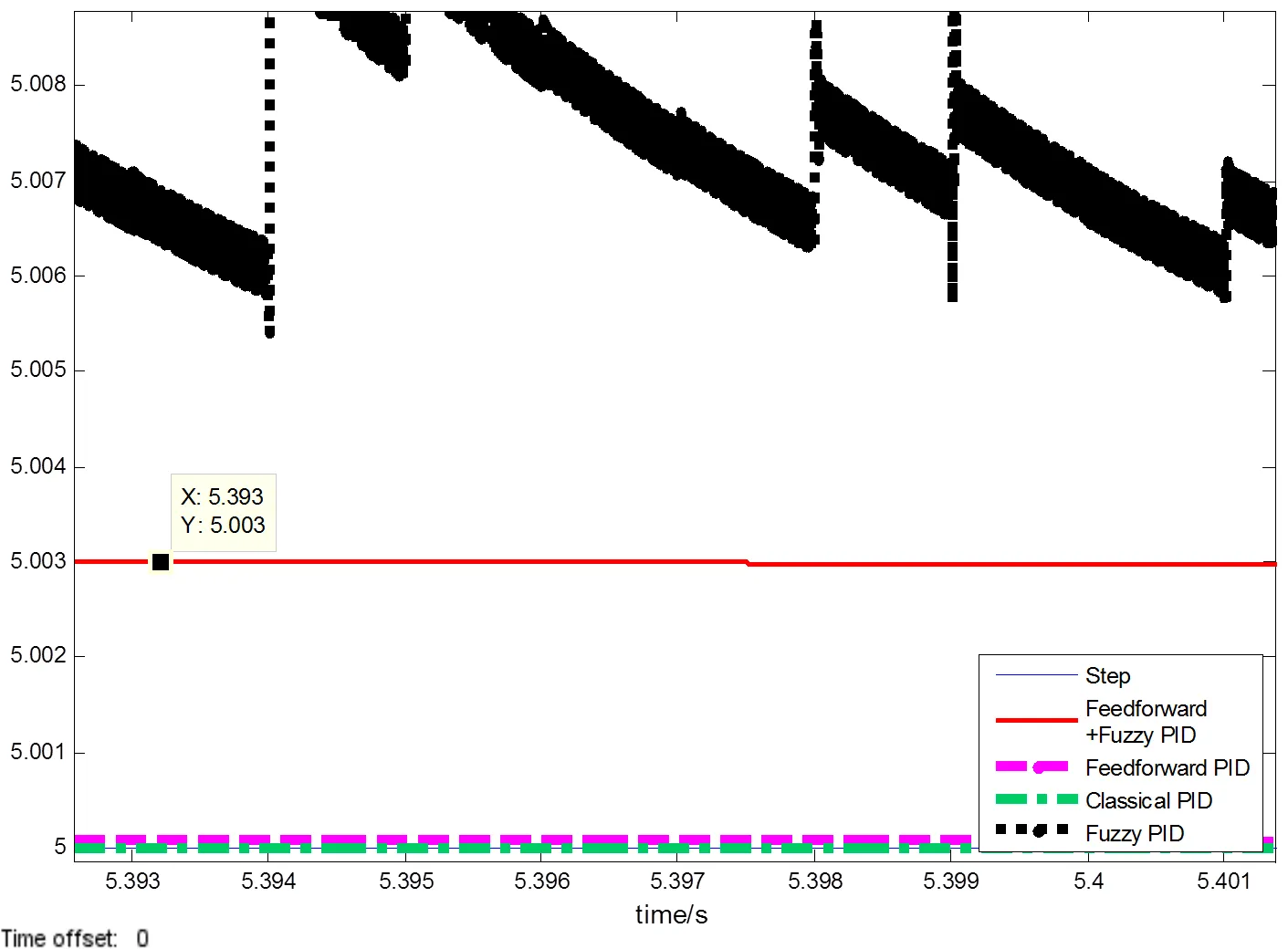
图7 5s后收敛精度仿真结果
3 结束语
本文以直流电机伺服控制系统为实验对象,从传统PID控制算法出发,分析了其优缺点,设计了前馈与模糊PID结合起来的复合控制算法。通过调整模糊推理规则,提高了复合智能PID的响应速度;通过调整PID的参数以及加入饱和限幅模块,其响应速度几乎提升至传统PID,超调量降低到几乎为零。最后将本文设计的算法与其他3种PID控制算法的响应速度、超调量和对扰动的自适应能力这3个特性进行对比,得出仿真结果表明:复合智能PID控制算法在响应速度与超调量方面均满足一般伺服控制系统的需求,并且其针对内部外部干扰,都有一定的自适应能力,适用于复杂的、非线性的、易受环境影响的控制系统。
[1] 马媛. 基于DSP直流伺服系统在调焦系统中的应用[D]. 北京: 中国科学院, 2006.
MA Yuan. Application of DSP-based DC servo system in focusing system[D]. Beijing: Chinese Academy of Sciences, 2006.
[2] 马艳, 韩佳, 刘晓艳. 基于模糊 PID 算法的无刷直流电机转速控制研究[J].自动化与仪器仪表, 2018(3): 35.
MA Yan, HAN Jia, LIU Xiaoyan. Research on Speed Control of Brushless DC Motor Based on Fuzzy PID Algorithm[J]., 2018(3): 35.
[3] 韩团军. 高精度无刷直流电机模糊控制系统的研究及FPGA实现[J].现代电子技术, 2018, 41(9): 176.
HAN Tuanjun. Research on high-precision brushless DC motor fuzzy control system and FPGA implementation[J]., 2018, 41(9): 176.
[4] 周承仙, 富巍. 基于前馈与反馈控制的位置伺服研究[J].火力与指挥控制, 2016, 41(12): 2263-2268.
ZHOU Chengxian, FU Wei. Research on Position Servo Based on Feedforward and Feedback Control[J]., 2016, 41(12): 2263-2268.
[5] 张雪侠. 基于ARM的模糊PID直流电机控制系统设计与实现[J]. 电子设计工程, 2018, 26(17): 81.
ZHANG Xuexia. Design and implementation of fuzzy PID DC motor control system based on ARM[J]., 2018, 26(17): 81.
[6] 张镭, 谢玮, 姜珊. 基于模糊控制的双闭环直流可逆调速系统的设计[J]. 计算机测量与控制, 2018, 26(5): 87.
ZHANG Lei, XIE Wei, JIANG Shan. Design of Double Closed-Loop DC Reversible Speed Control System Based on Fuzzy Control[J]., 2018, 26(5): 87.
Simulation of DC Motor Control Algorithm Based on Intelligent PID
LUO Na,ZHU Jiang,LI Yan
(Kunming Institute of Physics, Kunming 650223, China)
In recent years, owing to the application of new servo control technologies such as continuous zoom in infrared imaging, the requirements for linear position servo control systems have become increasingly high. Improving their control speed and control accuracy has become a widely discussed topic in the research community. In the DC motor servo control system, due to the nonlinearity and uncertainty of the controlled object, the traditional PID control does not adjust its parameters in a timely manner and has poor self-adaptability when responding to changes under varied operating conditions. To this end, this study proposes an intelligent PID control strategy that combines feedforward and fuzzy PID to form a composite intelligent control. The simulation experiments verify that this control strategy has fast response, small overshoot, and strong adaptive ability. We herein provide the reference for the design of the DC motor servo control system.
servo control, DC motor, intelligent PID control, response speed, overshoot
TM33
A
1001-8891(2020)05-0218-05
2020-01-14;
2020-03-06.
罗娜(1994-),女,硕士研究生,研究方向为光学工程(光电信息工程),E-mail:1813931143@qq.com。
