基于热感与红外感应的火灾救援路线规划小车
2020-04-30郭智鑫李明坤蔡雁培
郭智鑫,李明坤,蔡雁培,马 苗
(1.陕西师范大学 计算机科学学院,陕西 西安 710119;2.陕西师范大学 数学与信息科学学院,陕西 西安 710119)
0 引 言
随着科技的进步,人类消防隐患的防范措施也越来越完善。例如,消防人员在接到火警电话1分钟内就会出警,自备消防栓等灭火设备的布控也对短期内控制火情起到了至关重要的作用。时间就是生命,消防人员在情急之下进入内部情况不明确的火灾现场执行任务,往往会将自身生命置于危险中,出现救人不成反被困的情况。因此,降低潜在的火灾风险,最大限度地保护火场被困人员和消防救援人员的人身财产安全至关重要。
当今智能小车的发展十分迅速,在许多功能上已经出现了实质性的成果,可以实现循迹、避障、测距、图像传输等功能。文中旨在运用超声波传感器、红外传感器、温度传感器以及类车载录像设备等,设计并实现了一种可用于救火现场环境勘探的智能车原型,使之可以为外部人员提供准确的火场内部信息,在人身安全无法保证及救援时间紧迫的情形之下,实现对低层楼房火灾现场救援路线的快速规划,为救援节约出更多宝贵的时间,更大限度地保证救援人员的人身安全。
1 设计思路与各功能模块的设计
根据研究目的,文中拟设计的火灾现场勘探智能小车应具备循迹、避障、抗高温等基本功能。因此,总体设计思路是将智能车分为三个组成部分,即传感器部分、指令执行部分和CPU。该智能车除了能实现超声波避障和激光测温等基本功能外,还扩展实现了远距离图像传输和WIFI遥控功能。传感器部分增添的摄像头可以清晰感知前方路况,故温度传感器和超声波传感器分别采用了非接触式激光传感器和简单的红外反式传感器。智能小车的指令执行部分为直流电机电源驱动,主要负责调控智能小车的方向与速度以及舵机的转动。为了实现精确调速,故而选择不占用单片机资源,含有PWM功能的单片机。CPU为Arduino UNO单片机,输入代码以实现逻辑运算[1-3]。
智能车的组件清单如表1所示。各主要组成部分的原理及实现分别论述如下。

表1 智能车的组件清单
1.1 红外自动避障
由于物体可以反射红外光线,可以通过光线的反射来判断障碍物的距离远近,所以选用型号为E18-D50NK的红外避障传感器。该传感器是一种红外线反射式接近开关传感器,用于对障碍物的反射式检测,该传感器拥有体积小、耗能低、稳定性强等诸多优点。可直接与单片机的I/O口相连,检测目标时输出信号为低电平,正常状态下则为高电平。检测距离约为50 cm左右,距离可通过电位器调节[4]。
红外传感器原理如图1所示。
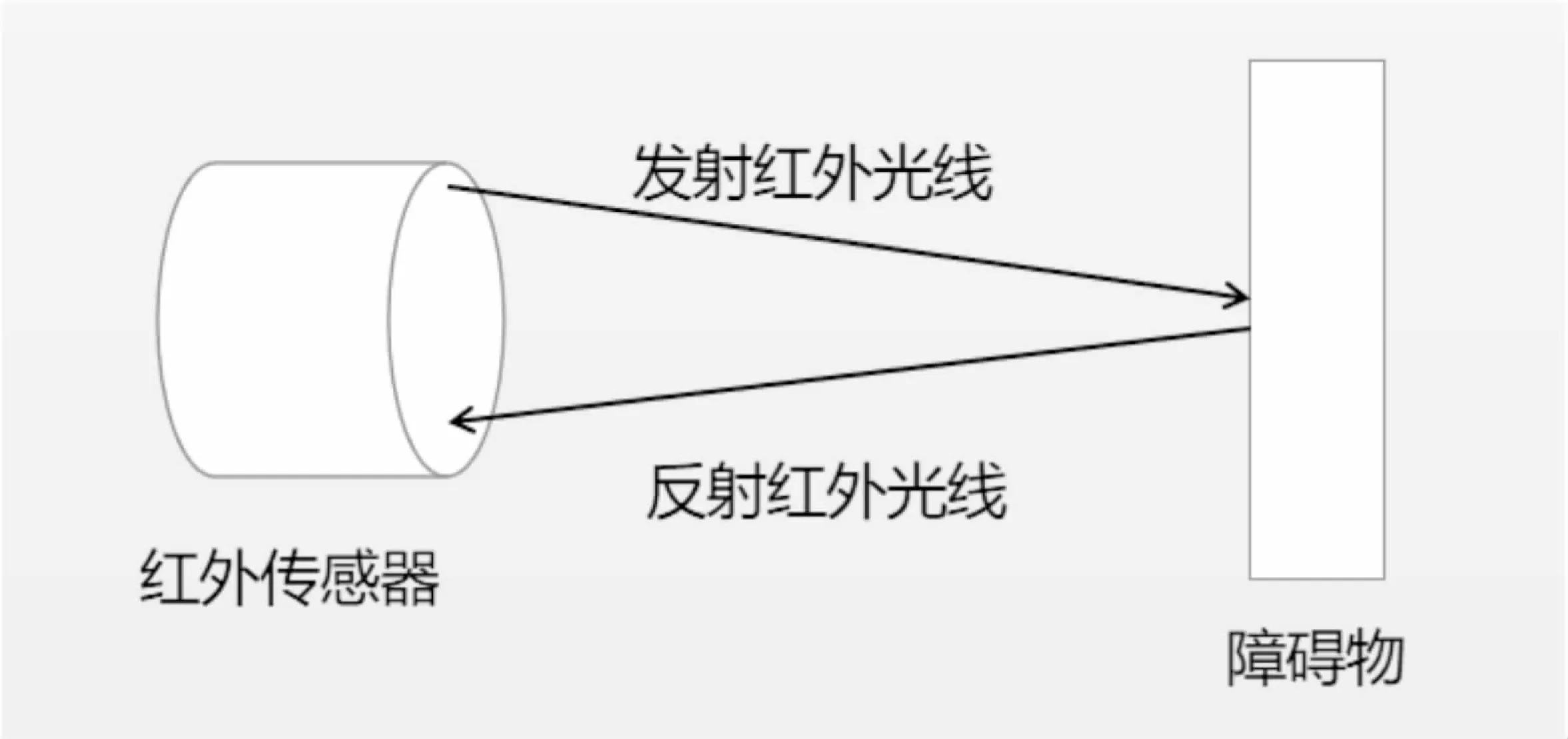
图1 红外传感器原理
E18-D50NK红外开关发射出红外线,被物体阻挡后部分反射;E18-D50NK接收到部分反射回来的红外光线后,会产生一个由高到低的电压变化;E18-D50NK再根据这个电压的变化将输出的数电信号传递给单片机处理。
红外线传感器包括光学系统、检测元件和转换电路,并具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号。当传感器的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到小车CPU,小车利用红外波的返回信号来识别周围环境[5]。
红外避障传感器的优点在于环境适应性强,在夜间和恶劣气象条件下的工作能力优于可见光;隐蔽性好,不易被干扰;红外系统的体积小、质量轻、功耗低;不受电磁波的干扰、非噪声源、可实现非接触性测量。
1.2 温感测温
由于火源会散发大量热量,故而可以期望在相当短的时间内获得较多的温度测量值,另一方面因为测距变化幅度大,温度变化幅度也会因而变大,所以将温度传感器安装在小车上,辅助红外避障系统[6]。
温感测温的工作原理是,通过对周围温度变化的感知,金属在环境温度变化后会产生一个相应的延伸,因此传感器可以以不同方式对这种反应进行信号转换。这种信号转换经过处理之后会返回给小车CPU,并达到辅助行进的目的。
该智能车的温度传感器为PT100型温度传感器,这是一种稳定性和线性都比较好的铂丝热电阻传感器,工作温度范围为-200~650 ℃之间。
传感器的接入非常简单,从系统的5 V供电端仅仅通过一支3 kΩ的电阻就连接到PT100了。这种接法通常会引起严重的非线性问题,但是,由于有了单片机软件校正的缘故,此问题可以被排除,因此就简化了传感器的接入方式。
按照PT100的参数,其在0 ℃~500 ℃的区间内,电阻值为100 Ω~280.9 Ω,按照其串联分压的揭发,使用如下公式可以计算出其在整百℃时的输出电压[7]。
Vcc/(PT100+3K92)*PT100=Vo(mV)
1.3 事先的路线设计与自动行进
虽然智能车拥有自动避障系统,使其可以在运行过程中自行探索出周围环境道路,但是,仍然希望在智能车真正投入使用之前在CPU中导入其所工作环境的具体信息。故实现了线路设计功能,而避障系统仅仅在灾情发生之后导致的环境巨大变化的情况下投入使用,首先可以减少不必要的能源耗费,其次可以提升工作的稳定性[8]。
线路设计的主要目的是,将地图导入小车使小车在不需要开启智能避障系统的情况下便可以进行正常行进。做法是:通过C程序导入周边环境的具体信息,小车执行任务时,通过比对传感器反馈的现实信息与已有的信息,判断是否启动自动避障功能[9]。
1.4 移动拍摄部分的设计
拍摄装置的作用是保证火场内的实时情况得以让外部消防人员及时掌握,以快速制定总体灭火救援行动方案,便于指挥入场救援人员的实时行动。如,本计划由A号楼梯上楼,而在救援人员已经进入火场之后,由小车传回A号楼梯火势已经不适宜强行上楼。此时,指挥人员便可及时更改计划并通知前方人员;在整个行动结束之后,通过对已有视频的再分析,达到总结经验的目的。
文中选择的拍摄装置及信息传输的方式:拍摄装置需要通过PC或Android完成控制、获取视频图像的功能。主要包括TCP通信,Bluetooth通信,Camera的调用[10]。
首先,通过监听button的pressed与released来发送控制指令。
然后,指令发送到Android手机端,继而转发给Arduino,从而控制电机正反转。
最后,通过调用Camera获取图像数据,传输到PC端,将数据转为图像显示ImagePanel。
1.5 远程无线控制部分
通过Arduino、Linux及其延伸的使用,使可自动化的小车同时能够手动控制,受控于手机端/PC端,并能够与手机端/PC端进行信息交互[11]。智能避障系统使小车在遇到任何障碍时选择回避,故而可能会错失一些重要的火场信息。为避免该情况的发生,为小车设置人工操作环节[12-13]。
人工操作时,小车的操作会由本来的双驱变为四驱(适时四驱系统会在后文详解),为人为操作的越障行为给予更大支持。全自动的智能车无法满足外部人员所需信息的收集需求,在消防人员到场的时候,先行获取小车自动行进时获取的信息,分析之后产生对智能车下一步探寻信息的需求指令,通过人为去获取下一步重要信息。
1.6 防火防高温材料的选择
高温防护材料具有阻燃、耐用、绝缘、轻便、使用寿命长等特点,是有效的屏蔽红外辐射热辐射和热传导的材料。在火灾现场的高温环境下,过高的气温与接触到被点燃物品的可能性大大增加,在此情况下,保证智能车内部的正常工作状态是至关重要的。高温防护材料不但能保护智能车内部重要部分在一定限度内不受火场环境影响,而且可以多次使用,其轻便的特点更是控制了智能车本身的质量,让小车的工作能够方便快捷的执行。
通过查阅有关资料,选用建筑所用的耐火硅胶,即20%陶瓷化硼酸锌+50%氢氧化铝(ATH)800 ℃×3h,进行智能车的部分外包装。其中,红外感应装置、火焰传感器、温度传感器以及移动端摄像头不在包裹范围之内。在包裹完成之后,小车的总体体积有小幅增加但并不影响整体运行。
2 实验部分与性能分析
文中的智能车拼装包括以下几个主要步骤,分别简述如下:
(1)底盘部分:使用螺丝和螺帽将左右两侧的履带安装在不锈钢底盘上,并将两个电机固定在履带驱动的两侧[14]。
(2)电子系统部分的安装:包括三个模块,XRbot-link 4.0 WIFI视频数传模块、UNO主板和PWR.AR.D电机驱动模块。首先使用尼龙柱将UNO主板安装在底盘上,并用螺丝固定;之后将电机驱动模块按照引脚对应插在UNO主板的插槽内;然后同样使用尼龙柱将WIFI视频数传模块安装在底盘上,并用螺丝固定;最后用USB数据线将电机驱动板和WIFI视频数传模块连接,并将DBi天线安装在WIFI模块的天线底座上。
(3)电机的接线部分:共有两个大功率电机,由于电机导线不分正负,逐个将电机的两根导线安装在电机驱动模块同组的电机接线孔内,并用螺丝固定。
(4)云台的组装:包括底座、两个舵机和四个舵盘,首先将十字舵盘安装在底座上,并用螺丝固定;之后将舵机和云台连接在一起,检查左右旋转角度是否能达到180°;然后使用舵盘将云台顶盖与另一个舵机连接在一起,最后将两个部分用螺丝连接固定[15]。
(5)云台及摄像头的安装:首先使用螺丝和螺帽将云台底座固定在底盘上,之后将摄像头底盘卡在云台顶盖的凹槽内,然后将舵机的GND、VCC和信号线对应电机驱动模块的接口安装固定,最后将摄像头的USB传输线接在WIFI数传模块的USB接口上。
(6)电池的安装:使用魔术贴将电池粘在底盘的下方,并将输出线安装在电机驱动模块的供电接口上。
(7)传感器的安装:包括一个超声波传感器和一组红外传感器。首先使用杜邦线将超声波传感器的四个引脚按照GND、ECHO、TRHE、VCC对应连接电机驱动模块上的接口;之后将超声波传感器固定在超声波传感器的底座上,并用螺丝将传感器固定在云台的前端;然后使用旋钮将红外传感器尽可能低地固定在底盘上;最后将红外传感器的导线按照GND、VCC和信号线对应接在电机驱动模块上[2]。
经过硬件安装后(如图2所示),进入性能测试环节。发现:(1)WIFI视频数传模块及摄像头在WIFI信号的传输极限在空旷地带大约在80米,在有阻挡的情况下大概在60米;(2)摄像头的分辨率为480×360,调焦效果较差;(3)关于云台的测试结果是其左右各可旋转90°,上下可旋转180°;(4)舵机控制并未出现卡顿或停滞,比较灵敏。

图2 智能车的原型
在拼装过程中遇到的问题主要有:(1)云台的上下旋转舵机在旋转到接近0°时会挤压到左右旋转的舵机造成锁死。解决方法:在未用螺丝锁死之前,手动调整舵机旋转的角度,使其旋转角度能到达0°,再重新固定舵机并用螺丝锁死。(2)电机的接线无法对应控制端的信号。解决方法:在控制端更改对应信号所驱动的电机。(3)智能车选材的耐火性质优于普通阻燃硅胶。在周边有可见火焰的情况下,小车的运行未收到影响。
在远距离测温实验中,PT100型温度传感器在智能小车所构建的电路中采用了恒压法连接,并通过欧姆定律所计算出PT100型温度传感器的实时电阻值,将所计算出的阻值传输至智能小车的主控板,并通过数据进行比对计算,进而求出智能小车周边的实时温度,显示在远程超控面板上。
在自动避障环节的测试中,发现在小车的转弯时间方面,由于地面摩擦力的不同,小车在不同路面上的转弯时间可能会有所不同。于是分别在光滑瓷砖和水泥路面上进行了转弯实验。经测量得,小车在光滑瓷砖上的转弯时间约为0.4 s,而在水泥路面上的转弯时间约为0.7 s。但由于火灾现场情况复杂,路面摩擦力甚至会更大,进而通过调整电机的转速,最终实现了小车在两种路面上的转弯时间都在0.5 s以内。
在检测障碍物的距离方面,分别用黑色障碍物和白色障碍物进行了避障实验。经检测,当前方放置白色障碍物时,小车在距离障碍物20 cm~25 cm时可实现自动避障,而当小车遇到黑色障碍物时,小车的避障距离却仅有5 cm~10 cm,若此时车速过大,可能会造成小车的损毁状况,所以为了避免这种情况,辅助安装了一个超声波避障装置,进一步改善小车的避障功能。
在远距离拍摄方面的性能测试时,将小车放置于距离操作安卓系统约200米处,操作手机使小车移动,并转动舵机使摄像头进行全方位拍摄。
3 结束语
文中设计的智能车以Arduino UNO单片机为核心,通过WIFI通信控制单片机与摄像头,以达到对行进方向与视频信号传输的操控,初步实现了在手机或PC端对小车的远程控制及其运动时捕捉周边环境图像视频信息的实时监控。该原型系统融合了以人为本的思想与物联网的新型“类消防栓式”思想,对争取火灾现场的勘探设计及研发新型的智能产品具有一定的现实意义和参考价值。