基于时变轨迹的信号交叉口变道行为危险性识别研究*
2020-04-29徐良杰郝艳萍
徐良杰 陈 琦 郝艳萍
(武汉理工大学交通学院 武汉 430063)
0 引 言
信号交叉口不当的变道行为易引发交通事故.相关统计结果表明[1],车辆变道产生的碰撞事故占总碰撞事故的4%~10%,多是驾驶员对自车与周围车辆的相对位置、速度关系判断失误导致的.为提高变道安全性,减少信号交叉口变道碰撞事故,越来越多的学者开始研究变道行为的特性[2-5]、对交通安全的影响[6]、变道模型[7-10]等.在变道过程中,变道车辆与周围车辆在每一时刻的运动状态都有差异,因此,通过行车轨迹对变道行为进行分析及判定显得尤为重要.
Park等[11]基于轨迹上起始车道和目标车道中的主车辆与相邻车辆之间的车辆相互作用,提出车道变换风险指数(LCRI)来评估变道车辆的碰撞风险;史颖[12]基于视频检测获取变道轨迹,通过车辆轨迹与车道分隔线的距离的方差判断变道行为的危险性;张颖达[13]基于NGSIM轨迹数据,用博弈理论解释拥堵路段车辆变道决策过程,并构建BP神经网络模型对变道时间进行预测.
总体而言,目前基于时变轨迹对变道行为危险性的研究较少.基于此,将基于变道车辆时变轨迹,分析轨迹上各点的危险程度,从而实现对信号交叉口变道行为危险性识别.同时,分析危险变道行为的相关特性,总结规律,实现对信号交叉口变道行为危险性的量化分析.
1 变道行为分析
1.1 变道安全性分析
在不干扰原始车道和目标车道车辆运行速度的情况下,变道行为能够提高车道占有率,充分利用道路空间,减少交通流中慢速车辆对快速车辆的影响,提高道路整体运输效率,此时变道行为是安全的;但在其他情况下,由于驾驶员操作不当或其他原因扰乱了原来有序的交通流,原始车道或目标车道交通运行效益下降,车辆间冲突增加,交通安全系数降低,此时变道行为较危险.在危险变道行为过程中,容易产生三种类型的冲突,分别为车辆追尾、车辆角碰、车辆侧刮,见图1.

图1 变道冲突类型
1.2 变道状态分析
以双向4车道为例,车辆变道环境模型见图2.

图2 车辆变道环境模型
在常规变道情况下,M车需要变道,将以侧向加速度,从原始车道前车Lo和后车Fo之间移动到目标车道前车Ld和后车Fd之间,因此,在整个变道过程中,这四辆车对M车的安全变道产生最直接的影响.
在变道过程中,变道车辆M与周围车辆可能发生几种情况的碰撞,如表1所示.

表1 碰撞可能性
1.3 变道阶段划分
根据车辆与车道线的相对位置,可将变道行为分为变道准备、变道执行和变道调整三个阶段,见图3.

图3 车辆变道阶段划分示意图
1) 变道准备阶段 从车辆开始横向移动,到车辆首次到达车道分隔线的过程.该过程易与原始车道后车Fo发生追尾,与目标车道后车Fd发生角碰、侧刮.
2) 变道执行阶段 从车辆首次到达车道分隔线,到车辆整体越过车道分隔线的过程.该过程易与原始车道前车Lo发生角碰、追尾,与原始车道后车Fo发生追尾,与目标车道后车Fd发生角碰、侧刮,与目标车道前车Ld发生角碰、侧刮.
3) 变道调整阶段 从车辆离开车道分隔线,到车辆驶入目标车道稳定跟驰的过程.该过程易与目标车道前车Ld、目标车道后车Fd发生追尾.
2 变道行为调查
2.1 数据采集
物理实验视频分析软件Tracker是一款详细分析视频内物体运动规律的免费软件,常用于分析质点和质心轨迹运动,尤其适合于高空航拍的顶视视角,便于建立均匀无需处理的坐标系.软件可获取轨迹追踪物体的速度、加速度、角速度,以及自定义的任意运用指标,并可建立相对坐标分析两个物体的相对运动.
本研究选择位于武汉市青山区的友谊大道与工业路信号交叉口进行交通调查.调查方法为视频调查法和人工调查法.调查时段为2018年4月11—13日早晚高峰(07:30—09:00;17:30—19:00)及平峰(09:00—10:30;14:30—17:00)的代表时段.用Tracker视频分析软件处理调查视频,提取的主要特征参量为时间、帧数、坐标、x和y方向的速度、瞬时速度与x方向的夹角(注:平行于行车道为x方向,垂直于行车道为y方向),分析示意图见图4.

图4 Tracker分析示意图
2.2 数据预处理
1) 变道车辆最小安全距离分析 为初步判断周围车辆对变道车辆的安全性影响,分析变道车辆在变道过程中与周围车辆的车辆间距,引入基于车头时距的安全距离模型.
S=v0·td+d
(1)
式中:S为最小安全距离;v0为后车制动前的速度;td为制动迟滞时间,取值为1.2~2.0 s;d为车辆停止后与前方车辆的安全距离,取值为2~5 m.
随机选取视频中50辆变道车辆,统计在其时变轨迹上各点对应的与周围四辆车的实际距离,计算相应速度下的最小安全距离.若实际距离小于安全距离,则认为该点两车处于危险状态;反之,则安全.统计变道车辆M与周围四辆车处于危险状态的轨迹点占总数的百分比,结果见图5.
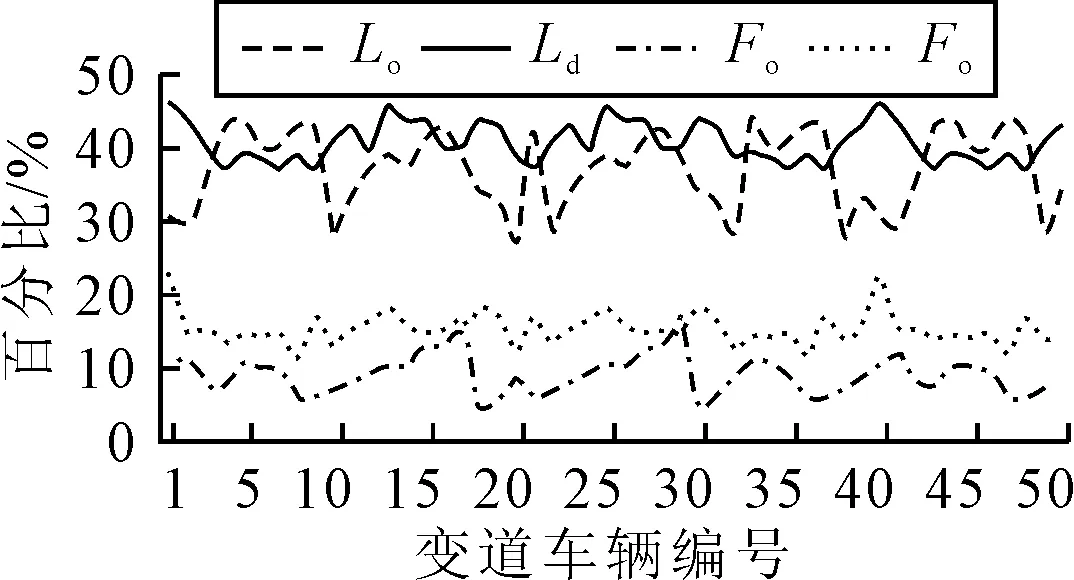
图5 危险轨迹点所占百分比
由图5可知,变道车辆M与原始车道前车Lo、目标车道后车Fd的实际距离小于安全距离的轨迹点所占的比例远大于目标车道前车Ld、原始车道后车Fo.变道车辆M与原始车道后车Fo处于危险状态的轨迹点所占百分比最小,约为10%.这是由于变道车辆M与原始车道后车Fo处于跟驰行驶状态,后车Fo会根据安全车距调整自身速度与两车间距,以免与前车M发生碰撞.变道车辆M与目标车道后车Fd处于危险状态的轨迹点所占百分比最大,约为40%.这是因为变道车辆M在驶入目标车道的过程中,对后方车辆Fd的判断需要借助后视镜完成,同时存在视觉盲区,易判断不准确,发生冲突的概率较大.因此,为简化研究,选取对变道车辆M安全性影响更大的两辆车为研究对象,即原始车道前车Lo以及目标车道后车Fd.
2) 变道车辆速度时变特性 提取视频中所有变道车辆,共计210辆,以变道车辆M、原始车道前车Lo以及目标车道后车Fd的车头中心点为标记点,以变道起点为标记的第一个点,变道终点作为标记的最后一个点,导出它们每隔10帧(30帧为1 s)在x,y方向上的速度大小,计算变道车辆M与周围车辆的速度差绝对值Δvx,Δvy,见图6.

图6 变道车辆的Δvx和Δvy时变特性
由图6可知,在x方向上,变道车辆M与原始车道前车Lo的速度差呈先增大后减小的趋势,1~3 s时间段内在最大值附近波动;与目标车道后车Fd速度差呈逐渐减小的趋势.在y方向上,变道车辆M与原始车道前车Lo及目标车道后车Fd速度差均呈先增大后减小的趋势,2~4 s时间段内在最大值附近波动.基于变道车辆与周围车辆的速度差,初步判断在变道开始后1~4 s时间段内,变道车辆M与原始车道前车Lo发生碰撞的概率较大;在2~4 s时间段内,变道车辆M与目标车道后车Fd发生碰撞的概率较大.
3) 变道车辆位置时变特性 导出变道车辆M与原始车道前车Lo及目标车道后车Fd在轨迹上各点对应的x,y坐标,计算变道车辆与周围车辆的相对距离Δx,Δy,见图7.

图7 变道车辆的Δx和Δy时变特性
由图7可知,在x方向上,变道车辆M与原始车道前车Lo的相对距离呈逐渐减小的趋势;与目标车道后车Fd的相对距离呈先减小后增大的趋势,2~4 s时间段内在最小值附近波动.在y方向上,变道车辆M与原始车道前车Lo的相对距离呈逐渐增大的趋势;与目标车道后车Fd的相对距离呈逐渐减小的趋势.基于变道车辆与周围车辆的相对距离,初步判断在变道开始后2~4 s时间段内,变道车辆与目标车道后车Fd发生碰撞的概率较大;在0~1 s时间段内,变道车辆与原始车道前车Lo发生碰撞的概率较大.
3 基于时变轨迹的变道行为危险性识别模型
3.1 I的基本原理
传统的碰撞时间TTC模型是针对单车道跟驰模型中前后跟驰行驶的车辆提出的,即速度只在x方向上分布.而变道过程中变道车辆的速度在x,y方向均有分布,即在垂直于行车道的方向也存在位置及速度的改变,因此,传统TTC模型不适用于变道过程碰撞危险性的研究,本研究提出变道碰撞时间的概念,用I表示,单位为s.
3.2 建立模型
基于时变轨迹的变道碰撞时间模型包括x方向的变道碰撞时间Ix以及y方向的变道碰撞时间Iy.假定整个变道过程中只有变道车辆在y方向上有速度分布,分析变道车辆与原始车道前车Lo及目标车道后车Fd的冲突,模型原理见图8,其中i-1车为前车;i车为后车.

图8 基于I的变道冲突示意图
(2)
(3)
式中:xi-1,xi,yi-1,yi分别为某时刻前后车在x,y方向上的坐标;vi-1(x),vi-1(y),vi(x),vi(y)分别为某时刻前后车x,y方向上的分速度;L为前车的车辆长度;ρ为变道车辆速度与x正方向的夹角.
变道车辆与周围车辆在x或y任一方向上先发生碰撞,即认为两车发生碰撞.因此,基于两车在x,y方向上的变道碰撞时间,建立变道车辆与周围车辆在时变轨迹上各点对应的变道碰撞时间模型:
I=min{Ix,Iy}
(4)
式中:I为变道车辆与周围车辆在轨迹上某点对应的的变道碰撞时间.
由于变道过程包括变道准备阶段、变道执行阶段以及变道调整阶段,为识别完整变道行为过程中原始车道前车Lo与目标车道后车Fd的危险性,基于时变轨迹上变道车辆与周围不同车辆的变道碰撞时间I,建立变道行为的危险性识别模型:
Ro=αo1·Io1+αo2·Io2+αo3·Io3
(5)
Rd=αd1·Id1+αd2·Id2+αd3·Id3
(6)
式中:Ro,Rd分别为变道车辆与原始车道前车及目标车道后车碰撞的危险度;Io1,Io2,Io3分别为变道车辆与原始车道前车在变道准备、变道执行、变道调整阶段的变道碰撞时间平均值,s;Id1,Id2,Id3分别为变道车辆与目标车道后车在变道准备、变道执行、变道调整阶段的变道碰撞时间平均值,s;αo1,αo2,αo3分别为Io1,Io2,Io3的权重;αd1,αd2,αd3分别为Id1,Id2,Id3的权重.
3.3 熵权法确定权重
熵权法的基本思路是根据指标变异性(相差值)的大小来确定客观权重.
设给定了n个评价指标、m个评价对象,则得到的原始矩阵为
(7)
标准化矩阵为
(8)
式中:rij为第j个评价对象在第i个评价指标上的标准值,为
(9)
在有n个评价指标、m个评价对象的评估问题中,第i个指标的信息熵为
(10)

根据信息熵的计算公式,计算出各指标的信息熵为E1,E2,…,En.通过信息熵计算各指标的权重.
(11)

以视频中的210辆变道车辆作为评价对象,以目标车道后车Fd为例,计算变道过程三个阶段对应轨迹上两车的变道碰撞时间的平均值Id1,Id2,Id3,将其作为变道过程中目标车道后车的危险性评价指标.根据上述熵权法计算公式,可以计算出三项评价指标各自的权重为αd1=0.18,αd2=0.50,αd3=0.32.即基于时变轨迹上变道车辆与目标车道后车Fd的变道碰撞时间,变道行为的危险性识别模型为
Rd=0.18Id1+0.50Id2+0.32Id3
(12)
同理,基于时变轨迹上变道车辆与原始车道前车的变道碰撞时间Io,变道行为的危险性识别模型为
Ro=0.45Io1+0.42Io2+0.13Io3
(13)
3.4 危险度等级划分
基于上述建立的危险性识别模型,根据危险度的实测数据计算值的区间分布情况,以及对变道实际安全状况的感受,对信号控制交叉口进口道的变道行为的危险度等级进行划分,见表2.

表2 危险度等级
4 案例分析
4.1 友谊大道-工业路交叉口数据
信号交叉口不同交通条件下发生的变道行为所属危险度等级有显著差异,采用视频调查中30个信号周期的调查数据进行分析计算,统计结果见表3.

表3 危险度等级分布
由表3可知,若仅考虑目标车道后车Fd,该交叉口危险度等级为A或B的变道行为占总数的49%;若仅考虑原始车道前车Lo,该交叉口危险度等级为A或B的变道行为占总数的39%.若Rd,Ro对应的危险度等级至少有一个为A或B,则变道车辆与周围车辆发生碰撞冲突的概率很大,属于危险变道行为,将针对此类危险变道行为,展开相应的分析与研究.
4.2 危险变道行为不同阶段特性分析
1) 危险变道行为不同阶段速度分布特性分析 统计变道车辆M在时变轨迹上各点的地点车速(m/s),计算每个阶段对应的地点车速平均值v,分布情况见图9.

图9 不同阶段速度分布统计图
由图9可知,在危险变道行为中,车辆在变道准备阶段和变道调整阶段的行驶速度较低,在变道执行阶段的行驶速度较高,这是由于驾驶员在变道准备阶段需要完成打开转向灯、观察后视镜等操作,在变道调整阶段需要减速驶入目标车道的跟驰车队中行驶;而在变道执行阶段,由于驾驶员存在侥幸心理,同时为避免原始车道及目标车道后车的挤压,会以较高车速越过车道分隔线.
2) 危险变道行为不同阶段变道碰撞时间分析 统计计算变道车辆M与原始车道前车Lo以及目标车道后车Fd在变道准备阶段、变道执行阶段、变道调整阶段对应轨迹段上各点变道碰撞时间(s)的平均值Io1,Io2,Io3,以及Id1,Id2,Id3,分布情况见图10.

图10 变道行为不同阶段变道碰撞时间统计图
由图10可知,在变道行为三阶段中,变道车辆M与原始车道前车Lo以及目标车道后车Fd最容易发生碰撞的均为变道执行阶段;变道车辆M与原始车道前车Lo在变道准备阶段发生碰撞的概率大于在变道调整阶段发生碰撞的概率,而变道车辆M与目标车道后车Fd在变道准备阶段发生碰撞的概率小于变道调整阶段发生碰撞的概率.在变道准备阶段,变道车辆M更容易与原始车道前车Lo发生碰撞,如追尾、角碰;在变道执行阶段,变道车辆M可能与原始车道前车Lo发生角碰,与目标车道后车Fd发生角碰、侧刮;在变道调整阶段,变道车辆M更容易与目标车道后车Fd发生碰撞,如追尾、侧刮.
因此,在危险变道行为的三个阶段中,变道车辆在变道执行阶段,即从车辆首次到达车道分隔线,到车辆整体越过车道分隔线的过程中与周围车辆发生碰撞的可能性最大,该阶段对交通安全的影响最大.
5 结束语
针对信号交叉口变道行为展开调查及危险性的研究,在武汉市典型信号交叉口调查的基础上进行研究.提出变道碰撞时间I,并基于变道车辆在时变轨迹上各点与周围车辆的危险程度,建立相应的变道行为危险性识别模型,应用模型对变道行为进行危险等级划分,研究危险变道行为的相关特性.对信号交叉口变道行为的危险性进行定量分析,从理论上提出变道行为危险性分析方法,为减少危险变道行为提供理论支撑.
