基于协同无人机的感兴趣目标定位
2020-04-29马俊杰黄大庆王金勐龚永富
马俊杰,黄大庆,王金勐,龚永富
(1.南京航空航天大学 电子信息工程学院,南京 210016;2.南京航空航天大学 中小型无人机先进技术工信部重点实验室,南京 210016)
0 引言
无人机(unmanned aerial vehicle,UAV),作为由人员操控的无人机载平台,随着越来越多地被应用于各个领域,其能够作为空中可移动监视平台的作用无论是在军事还是在民用领域都得到了长足的发展。对地面目标定位是其作为空中监视平台的重要需求之一,对地面感兴趣目标定位的目的是通过无人机所配备的传感设备,结合其飞行数据,求解感兴趣目标在参考坐标系下的位置信息。目前,通过无人机对感兴趣目标进行高精度定位已经成为国内外的研究重点。
通过无人机对地面感兴趣目标定位,根据其定位机制的不同主要可以分为两类,有源定位和无源定位。有源定位是通过在无人机上加装激光测距仪,根据测距结果以及无人机自身的飞行数据对目标进行定位,但是搭载载荷较多,对无人机自身性能要求较高,且容易暴露自身位置[1]。无源定位通过光学载荷获取地面目标图像,通过图像解算目标方位信息。樊邦奎、段连飞等人[2]提出通过无人机在空间中拍摄序列图片,实现两点交会的目标定位方法,但是定位精度较低。文献[3]假设目标高度为零,对地面感兴趣目标进行定位,并通过扩展卡尔曼滤波来提高定位精度。然而,这种方法只适用于平坦地面上的位置。文献[4]建立了空间三点交会的目标定位模型,结合传统的空间后方交会原理,利用差分进行目标定位,但是需要无人机对目标跟踪并多次拍摄,定位效率与实时性较低。
针对以上问题,本文设计了一种机载在线实时定位的协同无人机感兴趣目标定位系统,提出了利用三架无人机针对同一感兴趣目标同时进行观测,根据获取到的多幅图像,结合无人机飞行数据,通过主机搭载数据处理系统,实现机载在线实时目标定位。针对三架无人机观测精度上存在的差异,建立了基于内三角质心算法的定位模型,更好的减小了误差带来的影响。通过数值模拟与飞行试验证明通过三架无人机协同对感兴趣目标进行定位可以更好地利用观测数据,能够有效地提高定位效率与定位精度。
1 系统组成
1.1 系统整体结构
无人机协同感兴趣目标定位系统主要由三架四旋翼无人机记载平台以及地面站组成。四旋翼无人机分为主机与僚机,主机单独配备数据处理系统,主机与僚机搭载相同的飞行控制系统以及无线传输系统。其中,飞行控制系统负责飞行器的姿态稳定,并通过数据链路传输无人机飞行信息,包括无人机的姿态信息以及位置信息。光电平台包含机载摄像机以及云台控制系统。无线传输系统负责主机与僚机,主机与地面控制系统之间的数据传输。
目标定位系统利用三架无人机协同对同一感兴趣目标进行定位,如图1所示,主机与僚机在对目标定位的过程中,将采集到的图像信息通过与地面控制系统进行通信,传输已获取数据。地面操作人员控制光电平台转动,当感兴趣目标出现时,光电平台锁定目标,同时,无人机的飞行控制系统输出无人机的飞行数据,包含无人机的位置坐标和姿态信息,传感器测量摄像机的方位角和俯仰角,通过无线传输系统将信息传输到主机的数据处理系统,通过无人机协同目标定位算法求解感兴趣目标坐标。
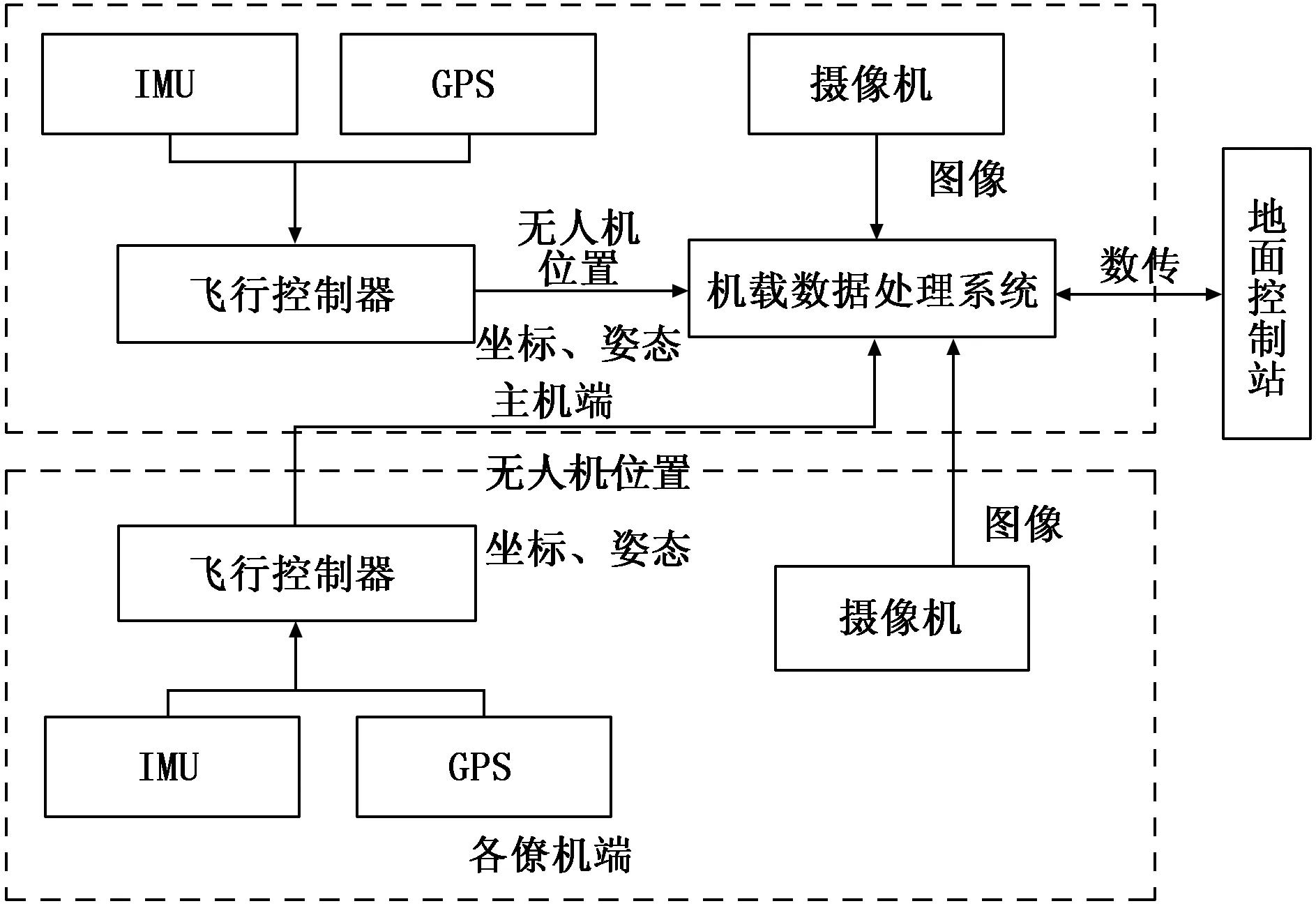
图1 感兴趣目标定位系统结构
1.2 硬件平台设计
1.2.1 机载平台
为了适应比较复杂的飞行环境,更好地对地面目标进行观测,本系统选用能够实现垂直起降、空中悬停、飞行性能优越的四旋翼无人机作为机载平台。
1.2.2 飞行控制系统
飞行控制系统主要包含飞行控制器、惯性测量单元(IMU)和负责定位的全球定位系统(GPS)等几个部分。
飞控选用了STM32F427处理器,采用双处理器工作模式,另外还配备一个定位于故障应对的处理器STM32F103,主要是为了防止当主处理器发生意外故障时停机导致无人机坠毁。
惯性导航测量单元选用ADXRS620工业级的陀螺仪和ADXL203工业级别的加速度计组成的外置(SPI接口的)IMU,可以通过SPI总线传输,SPI最大读取速率5 kHz,并且具有较低的功耗和较好的抗干扰能力,适用于无人机机载。
GPS采用NEO-M8N高精度定位模块。
1.2.3 无线传输系统
无线传输系统采用YL-100IL模块,通过该无线传输模块将各僚机的飞行数据以及摄像机的方位角俯仰角传输至主机的数据处理系统。YL-100IL载频315~915 MHz,具有低功耗,传输距离长,故障率低等特点。利用串口与数据处理系统通信。
图像传输模块采用瑞鹰5.8 G~2 W模拟图传,传输距离可以高达5~15 km,该模块抗干扰能力强,具有优秀的图像传输能力。
1.2.4 数据处理系统
主机配备的数据处理系统采用Raspberry pi 3b+,采用了BCM2837B0处理器。CPU由1.4 GHz 64位4核 ARM Cortex-A53组成,可以满足对感兴趣目标的坐标解算。此外, Raspberry pi 3b+具有低功耗的特点,整体功耗低于7.5 W,适用于无人机机载目标定位任务。
该系统的主要任务为通过无线传输系统接收各僚机的飞行与姿态数据及其摄像机的方位角和俯仰角,结合主机获取的数据,利用无人机协同目标定位算法实现机载实时解算地面感兴趣目标的坐标。
1.2.5 地面控制系统
地面控制站处理器为Intel Core i5-7300HQ,主频为2.50 GHz,主要有以下几个功能:1) 观测实时采集的视频信息;2)远程控制无人机的光电平台转动以锁定目标;3)实现无人机的航迹规划。
2 协同目标定位算法
2.1 双像交会目标定位
本文的参考坐标系为大地直角坐标系。将坐标变换的旋转矩阵表示为R,平移矩阵表示为T:
(1)
由此可以将目标坐标表示为:
(2)
其中:R=RBRNRG,RGRN和RB是坐标系坐标变换的旋转矩阵,G代表大地直角坐标系,N为NEU坐标系,而B代表载机坐标系。(XC,YC,ZC)为目标在摄像机坐标系中的坐标,(XG,YG,ZG)是目标大地直角坐标系中的坐标[5]。
根据中心透视投影的成像原理,在进行地面感兴趣目标定位任务时,当无人机使用所配备的摄像机观测地面目标点A,获取到的航拍图像是目标的中心投影,相应的像点a和摄像机的光学中心共线。
故由中心透视成像关系可得:
(3)
其中:M为中心透视投影的投影矩阵:
(4)

由公式(3)、(4)联立可得:

(5)
如图2所示,通过两架无人机在不同处观测同一个地面感兴趣目标A,地面控制站通过数据链路获取目标A的图像信息并控制光电平台锁定目标,得到图像的像点坐标数据A1,A2,在误差可以忽略时,两架无人机所搭载的相机光学中心与像点的射线交汇于目标点A。由此根据公式(5)可以得到4个方程,从而解算出目标点A的坐标(XA,YA,ZA)。

图2 双像交会目标定位
2.2 内三角形质心算法
通过无人机摄像机获取感兴趣目标信息时,由于目标的物距远远大于相机的焦距,所以无人机目标定位的精度容易受到噪声干扰。本文基于双像交会视觉定位原理,通过三架无人机对同一个地面感兴趣目标进行观测,获取多张包含目标信息的图像,并通过质心算法来提升定位精度。
利用三架无人机协同获取包含同一地面感兴趣目标点的图像,根据第二节中的坐标系转换公式(2)以及中心透视投影的成像原理,以地面感兴趣目标点A的坐标(XA,YA,ZA)作为未知量,引出下式:
(6)
由上述双像交会视觉定位原理可以得到目标点在参考坐标系中的位置坐标为:
(7)
其中:
由于图像噪声的存在,图像有效信息的提取也会受到影响,为了减少冗余误差信息的干扰,引入内三角质心算法,采用最优估计方法来提高定位精度。

表1 内外部元素数据
目标点A点的坐标为(XA,YA,ZA),由此可得感兴趣目标点坐标的估计值应该满足以下目标函数:
(YA-YAi)2+(ZA-ZAi)2,i=(1,2,3)
(8)
要满足式(8),则由内三角形质心算法可知,各变量值与其平均数的离差平方之和等于最小值[6],由此可得目标点A坐标的最优估计为:
(9)
由此得到地面感兴趣目标点A的坐标(XA,YA,ZA)。
3 实验与分析
3.1 数学仿真实验

为了验证算法的正确性,利用本文提出的目标定位算法来计算表1三组图像中的地面感兴趣目标点A的坐标,并与真值作比较。得到结果:
XA=[λA=32.041151°φA=118.830066°hA=100 m]T与真值相同,验证了算法的正确性。
3.1.1 仿真实验一:目标定位鲁棒性分析
蒙特卡罗方法[7]是一种通过预设参数误差对数值进行随机初始化,模拟产生影响的方法。本实验通过蒙特卡洛方法,针对无人机定位鲁棒性进行数值仿真实验。本文在充分考虑样本数量,以及保证计算时间的情况下,通过蒙特卡洛方法模拟无人机协同定位算法针对感兴趣目标定位误差源的样本值[8]。各误差源的随机方差根据机载飞行平台以及摄像机云台系统输入。为了验证本系统的定位鲁棒性,以表2中的参数误差数据为例,通过对本系统以添加随机测量误差验证系统目标定位鲁棒性。
针对上文建立的基于协同无人机的感兴趣目标定位模型[9],结合表2的误差参数模型,以蒙特卡洛随机序列为10000次进行仿真。仿真结果如图3所示,其中图3(a)、(b)、(c)分别为经度坐标误差分布、纬度坐标误差分布和其高程位置坐标误差分布,由此可以看出基于协同目标定位算法的感兴趣目标定位坐标误差服从正态分布,图3(d)为目标在空间中的位置分布。对仿真结果求均值,得到经度误差为0.000 186°,纬度误差为0.000 161°,高程位置误差为9.56 m,换算为地面感兴趣目标的位置结果与真值的位移偏差为26.6 m。结果表明,通过协同定位算法所得结果避免了较大误差,可以有效平衡随机误差,具有较高的鲁棒性。

表2 参数误差值
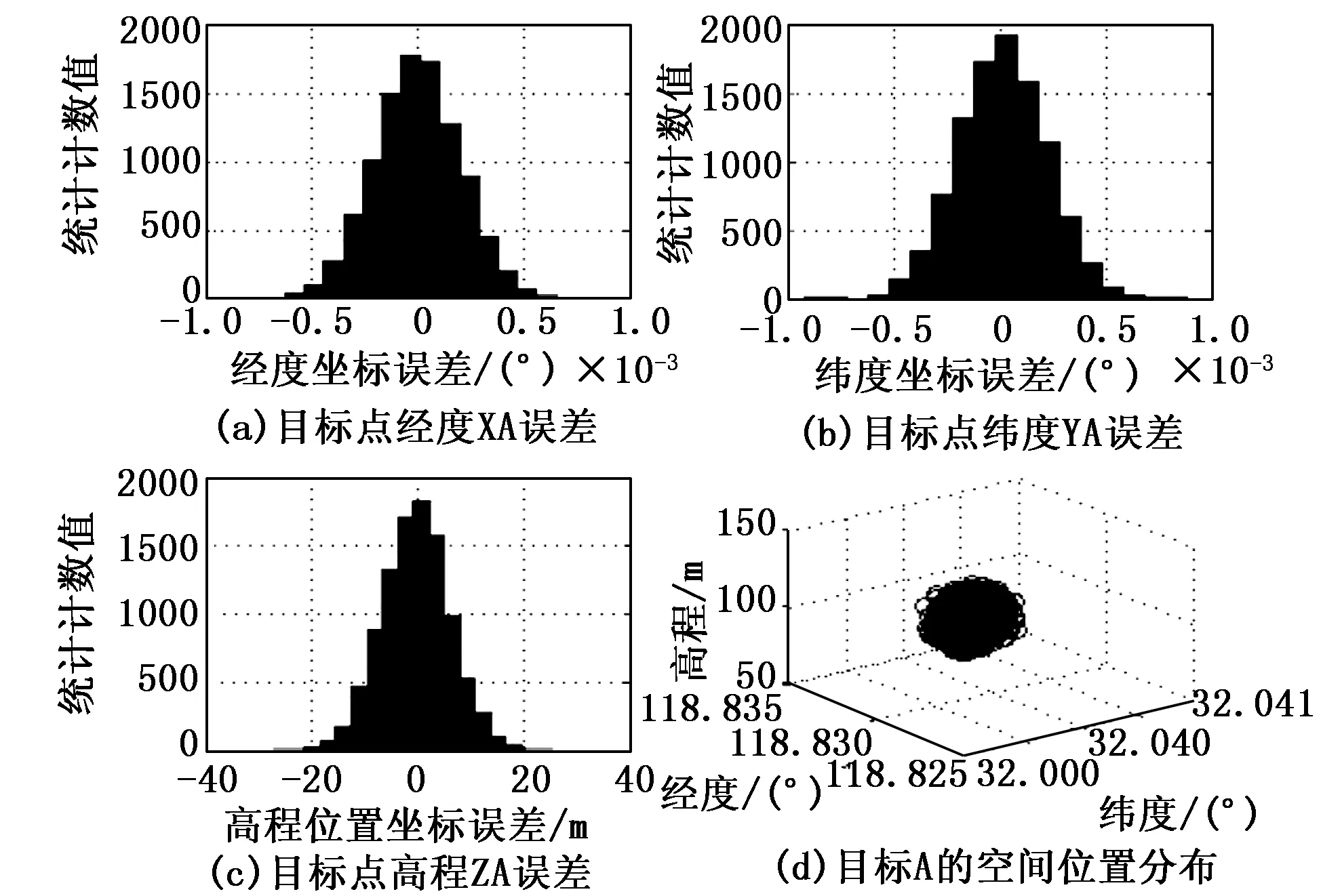
图3 目标定位结果
3.1.2 仿真实验二:目标定位精度分析
由于本文提出的通过协同无人机对感兴趣目标定位能够有效利用多幅图像的信息,并通过最优估计降低定位误差,具有较高的鲁棒性,并且对测量误差的具有较高的平衡能力。为了验证这一特性,将该方法与单机定位方法[10]进行比较。对飞机坐标添加误差,从0~60 m,间隔1 m,绘制随误差变化的定位精度曲线如图4(a)所示。对图像的像点坐标添加误差,从0~80像素,间隔1个像素,绘制随误差变化的目标定位精度曲线如图4(b)所示。随着像点坐标误差与飞机坐标误差的增大,单机目标定位系统和本文所提出的协同定位系统的定位精度均近似线性下降。通过图4可以看出,对于同一误差水平的每组图像,本文所提出的基于协同无人机的感兴趣目标定位方法的精度明显高于单机目标定位方法。

图4 目标定位精度分析
3.2 飞行验证实验
在本节中,通过飞行测试数据验证本文提出的协同无人机对感兴趣目标定位系统。为了验证该系统,在外场环境下进行了飞行试验。同时使用3架无人机对感兴趣目标进行观察。无人机主机与僚机配备光电平台(分辨率1920×1080像素大小4.2 μm),无人机飞行高度约100 m,无人机如图5所示。

图5 无人机
通过三架无人机协同定位地面感兴趣目标,共测试十次,无人机拍摄感兴趣目标图像如图6所示,对误差结果取均值,得到感兴趣目标定位的误差结果为:B=2.6310×10-5(°),L=1.1563×10-5(°),H=3.43(m),D=4.82(m),其中B代表经度误差,L代表纬度误差,H代表高程位置误差,D代表误差距离。

图6 感兴趣目标
4 结束语
针对现有无人机目标定位的局限性,设计了一种新的协同无人机对感兴趣目标定位系统。通过三架无人机同时观测同一地面感兴趣目标,建立了基于共线方程的无人机协同目标定位数学模型。通过内三角形质心算法对模型进行机载在线实时求解,充分利用了观测数据中的有效信息,减少误差信息的干扰。最后,通过数值模拟实验和外场飞行实验验证了该系统具有较高的定位精度以及鲁棒性。结果表明,该基于协同无人机的感兴趣目标定位系统不仅能有效提高目标定位实时性,也能提高目标定位的效率与定位精度,在现实的工程应用中有较大的应用潜力。
