带权超网络的航天测控预设阵地的定位与定向
2020-04-29侯玉霞
廖 琳,侯玉霞
(1.桂林理工大学 理学院,广西 桂林 541006; 2.桂林理工大学 旅游与风景园林学院,广西 桂林 541006)
0 引言
航天测控是由火箭运载、航空轨迹跟踪、远程信号接收、远程信号处理等多项技术共同组成的网络体系,能够根据待测主体所发出的具体信号类别,完成后续的任务指令执行及轨迹方向判定等处理。受到地球表面曲率作用的影响,整个航天测控的实施过程只能以无线电微波作为单一传输介质,且这种综合型的实操系统不可能根据一个目标节点的实施行为,来判断整个火箭体或航空运载体的航行轨迹[1]。因此,为实施航天测控的全程监视,还需要多个地面站点的“接力”连接,一方面将上级预设阵地的物理信息完整传输至下级预设阵地,另一方面联合所有阵地主体,形成一个独立的信息传输链路。所谓预设阵地也叫临时停靠阵地,是指主体航空轨迹中可供设备暂时停留的物理位置,通常存在于轨迹的中后段位置。对于火箭及其它航空设备来说,前半段航行的动量导向力相对较足,设备体无需在轨迹内做出无用停留;而后半段航行的动量导向力相对较弱,设备体必须在各级预设阵地内做出短暂停留后,才能顺利完成后续的既定航行任务。
近年来,随着航空航天技术的不断发展,如何定位轨迹内预设阵地所处的具体位置,成为了一项亟待解决的物理难题。传统Y/JTG-1方法根据航天测控器的非线性误差行为,计算航行设备与预设阵地间信息传输的频度条件,再借助既定串行芯片,确定航行网络中可能出现信息交互行为节点的所在位置,进而完成预设阵地的定位与定向处理。但随着执行时间的延长,经由这种方法所得到的D-S系数与P-S系数均不能达到理想数值水平。为解决此问题,引入带权超网络,设计一种新型的航天测控预设阵地定位与定向方法,借助射频电路、微型测控处理器等硬件结构,布施所有满足应用条件等带权超节点,再利用相应型号的单片机设备,实施最终的定位与定向处理。实验结果表明,这种新型实施手段能够在确保航天器稳定航行的前提下,提升D-S系数、P-S系数的数值水平,有效解决Y/JTG-1方法应用性不足的问题。
1 基于带权超网络的航天测控环境搭建
基于带权超网络的航天测控环境由射频电路、微型处理器、网络串行芯片等几部分组成,具体搭建方法如下。
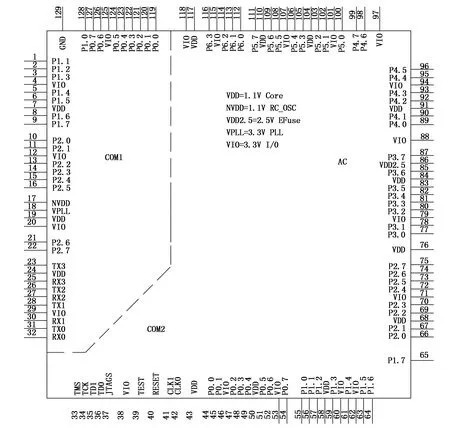
图2 微型测控处理器结构图
1.1 航天射频电路
航天射频电路是带权超网络中的唯一电量输出装置,由RAM、ROM、测控电阻、射频芯片等多个物理结构共同组成,如图1所示。测控驱动器W1、W2同时存在于航天电流输入端的正下方,能直接调节驱动电阻的接入数值水平,进而使RAM、ROM设备两端的负载电压逐渐趋于稳定。CCI设备位于电阻器的头结点位置,调配航天测控电阻R1、R2、R3、R4的执行数量值,并将所有数据信息汇总,传输至电子寄存器内部。CC2530射频芯片是航天射频电路的核心构成元件,同时驱动ALU、ACC、PSW等多个航天测控装置,为保证带权超网络内电压处处相等,传输电子必须先进入电量测控装置,才能与板材结构内的预留射频电量完全相融。航天电量控制器与带权超网络信道直接相连,可在接收预设传输电子的同时,将未完全利用的射频电量分配至I1、I2两个电子寄存器内部,在确保预设阵地所处位置不出现明显变化的情况下,联合D1、D2两个协调器装置,完成整个航天射频电路内的电流输出任务[2]。为保证航天设备能够得到稳定的电子供应,射频电路内还并联一个微型的内控电路,可按照电量控制器传输电流的具体变化情况,更改测控任务的最终行为趋势。

图1 航天射频电路图
1.2 微型测控处理器
微型测控处理器在带权超网络中起到核心控制作用,能根据航天设备的现有执行状态,规划预设阵地在后续航行轨迹中可能达到的最远路径范围,为后续定位与定向操作提供可依据的数值化条件。整个单体处理器由PWR、TRIP、CPU、AC共4类结构共同组成,如图2所示。PWR设备也叫为微型调控芯片,置于测控处理器的最左端,能够感知CC2530射频芯片的连接行为,进而控制航天电路内的电子传输行为,使预设阵地接收到的电量信号始终保持稳定状态[3-4]。TRIP设备的物理功能与测控处理电阻类似,可根据航天电子寄存器、航天电量协调器内交变电流的传输情况,更改主电路中的实际接入电阻,并以此为条件,限制电阻器的真实跳频范围,使因预设阵地选取而引发的航天测控电压改变量快速趋于稳定。CPU设备是CC2530射频芯片的辅助执行设备,具备较强的电子感知能力,在既定航行时间内,可引导带权超网络逐渐向着并联化状态演变,从而促使微型测控处理器能够与其它关联设备保持安全性连接。AC设备置于测控处理器的最右端,具备20个以上的连接惯脚,是唯一保持单相接入的微型测控处理器实施元件。COM1是航天射频电子的传入接口,COM2是航天射频电子的传出接口,在既定测控周期内,只有两个接口同时保持占用状态,才代表微型测控处理器以完全接入航天射频电路中。
1.3 网络串行芯片
网络串行芯片位于航天测控设备的主体结构单元中,可借助无线电波实现与预设阵地间的信息互传,并以此加强带权超网络的外部执行稳定性,其结构如图3所示。整个网络串行芯片保持上、下两层的分级连接形式,空白部署处分设多个网络电阻R,一方面对航天执行装置中的交变电流实施整合转换,另一方面稳定测控环境内的核心输出电压。最上端连接开关直接控制串行电子接口器的测控处理行为,可以在多个网络电阻R的共同作用下,将处于分散状态的航天传输电流整合成束状结构。MS10232NL设备负责驱动定位单片机装置,通过多个物理惯脚直接接入芯片板材,主要执行带权超网络内的电量平均处理任务。RH25L182元件是网络串行芯片的核心搭建设备,周围环绕着多个网络电阻R,可吸取每个执行电阻内的流通电子,并将其驱散至接口器装置中。SMSCBJ10A设备负责驱动定向单片机装置,可根据航天测控处理器中定向外力矩的数量级水平,更改航天行驶轨迹中预设阵地的实际数值条件[5]。ERBCV100设备位于网络串行芯片的最下端,兼备信息综合、电量综合、指令综合等多项处置任务,能直接调用航天射频电路中的交变电流。

图3 网络串行芯片结构图
1.4 带权超节点布施
如图4所示,节点布施是航天带权超网络组建与协调处理的必要行为,在微型测控处理器全面接电后,联合网络串行芯片规划MAC、NWK、PAN等多个航天阵地节点所处的具体位置。在航天带权超网络中,微型测控处理器、串行芯片均保持独立并联的接入状态,且随着总航行轨迹的延长,所涉及预设阵地的数量级水平也会不断增大。为保证后续定位、定向指令的准确性,MAC航天测控节点可以在get-request与trap协议的促进下,同时执行网络电流的传入与传出处置,并将未完全消耗的电量信息导入至航天测控信道内[6]。NWK节点置于带权超网络的中部位置,与二级预设阵地相对应,在整个航空电子传输过程中,始终遵循get-next-request与PDU协议的连接需求。PAN节点置于带权超网络的最末端,与三级预设阵地相对应,因本层结构中航天测控指令的执行步骤相对复杂,故同时受到set-request、SNMP、get-response等4项传输协议的同时作用影响。

图4 带权超节点布施原理
2 预设阵地的定位处理
在航天测控带权超网络环境的基础上,按照预设阶段划分、定位点布局、单片机连接的操作流程,完成预设阵地的初步定位处理。
2.1 航天测控的预设阶段划分
航天测控的预设阵地分布于航行轨迹的中后部,为一个具有实际运载任务的设备结构体。在航天测控轨迹中,包含中间位置节点在内共有3个最主要的测控待整单元,分别命名为“初始预设阵地”、“逼近预设阵地”、“修正预设阵地”,且每一类型阵地结构都对应一个相对独立的航天测控阶段。
1)初始预设阵地:初始预设阵地与初级航天测控行为对应,在此过程中航天设备始终维持初始的航行状态,这是整个预设阵地定位处理所参考的第一类数据信息。
2)逼近预设阵地:逼近预设阵地与中间航天测控行为对应,在此过程中航天设备的航行行为首次发生改变,这是整个预设阵地定位处理所参考的第二类数据信息。
3)修正预设阵地:修正预设阵地与末尾航天测控行为对应,在此过程中航天设备的航行行为逐渐趋于稳定,但总体数值水平远低于初始阶段,这是整个预设阵地定位处理所参考的第三类数据信息[7]。

图5 定位单片机结构图
设Q1、Q2、Q3分别代表第一类数据信息、第二类数据信息、第三类数据信息,联合上述物理量可将航天测控预设阶段的划分定义式表示为:
(1)

2.2 预设阵地的定位点布局
预设阵地定位点布局以带权超网络中的航天测控节点作为操作目标,按照不同预设阶段的结构特定,规划行为坐标体系内定位向量的指引方向。在带权超网络坐标系内,A0代表航天测控预设阵地的初始位置信息,An代表航天测控预设阵地的完结位置信息,联立公式(1),可将预设阵地的定位点统筹规划原理表示为:
(2)

在确保预设阵地统筹规划位置不发生改变的前提下,以既定时间T作为计数条件,在带权超网络坐标系内所有可能出现的曲率数值中,随机挑选一个向量定义为β′,设R0代表下限布局边界参数,R1代表上限布局边界参数,联立公式(2),可将航天测控预设阵地的定位点布局判别式表示为:
(3)

2.3 定位单片机
定位单片机是航天测控装置内,直接与预设阵地交换定位指令的物理结构,总体电感抗压量略低于航天射频电路,受到微型测控处理器、网络串行芯片的直属领导,属于带权超网络中的“核心指挥元件”,如图5所示。处于中间位置的AVR定位主板,在感知航天测控装置与预设阵地间物理距离的同时,向连接开关传输控制指令,进而影响位置协调器的执行状态[8]。MCS-51电阻位于定位主板下方,与最下端的两个信号接收器直接相连,能准确接收预设阵地主体发出的微弱关联信号,并调节现有执行指令中的布局实施行为,实现无误定位的目的。
3 预设阵地的定向处理
联合单片机设备,满足航天测控预设阵地的定位需求,再通过确定联测方位角、计算定向外力矩的方式,实现阵地主体的定向处理。
3.1 联测方位角确定

图6 延伸型联测方位角确定 图7 发散型联测方位角确定

图8 定向单片机结构图
在带权超网络中,因航天测控预设阵地定向而产生的联测方位角包含延伸型、发散型两大类,分别如图6和图7所示。其中,延伸型联测方位角的起始节点“0”位于预设阵地的最右侧,各下级联测方位角按照关联排列的方式,分布于预设阵地的左侧区域[9]。针对这种类型的联测方位角,需要严格记录每个节点所属的位置信息,再通过计算“0”位置到其它节点物理距离的方式,完成最终的定向确定处理。
发散型联测方位角的起始节点“0”位于预设阵地的中间位置,各下级联测方位角按照“逆时针”排列方式,分布于预设阵地的周围区域。针对这种类型的联测方位角,需要紧密控制下级节点与起始节点间的物理距离,再通过度量相连节点间网络位移差的方式,完成最终的定向确定处理。
3.2 预设阵地的定向外力矩

(4)
其中:ΔF代表定向处理时间内航天测控预设阵地所受向心力的变化量,k1、k0分别代表力矩作用效果的上下限应用系数,ε代表航行转速的实际偏转量,d代表定向作用条件,μ代表预设阵地的抗压感知参量。
3.3 定向单片机
定向单片机执行由带权超网络发布的航天测控任务,可根据预设阵地在航行轨迹中的资源占用情况,确定联测方位角、处置外力矩的实际作用效果,由HSL/HSO芯片、定向执行器、负载电阻、信号接收器、定向判断开关5部分组成。如图8所示,HSL/HSO芯片与核心网络主机相连,能够借助传输导线,干预单片机结构的导入行为,进而实现航天测控预设阵地的初步定向处理。定向判断开关位于单片机左侧,与执行器设备体相连,在带权超网络中直接控制测控主机的接入行为,并以数据流的形式,将所有信息参量传输至预设阵地内部[11-12]。信号接收器具备良好的无线感知能力,可在超导测控波的促进下,与定位单片机建立物理连接。负载电阻与定向执行器相匹配,是定向单片机结构中的电子导流装置,可根据航天测控行为的改变,大致限定预设阵地的实际所处区域。至此,完成所有参数处理及硬件结构搭建,实现带权超网络航天测控预设阵地定位与定向方法的顺利应用。
4 应用比对分析
为验证带权超网络航天测控预设阵地定位与定向方法的实用性,设计如下对比实验。在模拟平台中,设置两台执行状态完全相同的航天执行器作为实验对象,对实验组执行器实施新型定位与定向方法,对对照组执行器不实施任何干预手段。在既定监测时间内,分别记录D-S系数、P-S系数的具体变化情况。
4.1 实测环境建立
在带权超网络环境中,可按照如表1搭建实验所需监测平台。

表1 实验监测环境
为突出实验处置的公平性,实验组、对照组平台连接系数始终保持一致。
4.2 D-S系数
D-S系数直接影响航天测控预设阵地的定位精准性,通常情况下前者数值越大,后者能力越强;反之则越弱。实验组、对照组D-S系数的具体变化情况如图9所示。

图9 D-S系数对比图
分析图9可知,实验组D-S系数从第30 min开始,出现明显上升的变化趋势,直至第35 min达到最大值69.8%;对照组D-S系数在整个实验过程中,基本始终维持相对稳定的变化趋势,全局最大值仅达到42.7%,远低于实验组数值水平。综上可知,应用带权超网络航天测控预设阵地定位与定向方法,可使D-S系数呈现明显上升的变化趋势,对航天测控预设阵地的定位精准性起到极强促进作用。
4.3 P-S系数
P-S系数直接影响航天测控预设阵地的定向精准性,通常情况下前者数值越大,后者能力越强;反之则越弱。图10反应了实验组、对照组P-S系数的具体变化情况。

图10 P-S系数对比图
分析图10可知,随着实验时间的增加,实验组P-S系数出现先上升、再稳定的变化趋势,全局最大值达到60.5%;对照组P-S系数在出现阶段性稳定状态后,开始持续下降,最大值仅能达到33.7%,远低于实验组数值水平。综上可知,应用带权超网络航天测控预设阵地定位与定向方法,可促进P-S系数的不断提升,进而使航天测控预设阵地的定向精准性大幅增强。
5 结束语
在带权超网络的干预下,航天测控预设阵地的定位与定向方法联合射频电路、微型处理器等硬件设备,布施所有节点组织,再根据预设阶段划分、联测方位角确定等原理,实现最终的定位与定向处理。从实用性角度来看,D-S系数、P-S系数均出现明显的上升趋势,实现对航天阵地所处位置的精准性控制。
