高职ABB工业机器人打磨筛选分拣工作站教学平台设计
2020-04-28黄霜梅
梁 勇,梁 晟,黄霜梅,肖 林
(1.贵州电子科技职业学院,贵州 贵安新区 550025;2.贵阳学院, 贵州 贵阳 550005;3.贵州建设职业技术学院, 贵州 贵阳 550002)
工业机器人是一个典型的综合机械、电气控制、传感器控制及气动液压技术的多学科交叉融合的一体化的产物,它的应用涉及自动化控制、机械设计与制造技术、传感器技术、视觉控制技术、计算机技术、通信技术、以及人工智能等众多领域。高职工业机器人技术专业是一个近些年来随着工业技术的升级发展应运而生的专业。由于是一个新兴专业,在专业建设中难免存在教材和实训平台不足的现象。在实际教学中,我校的工业机器人技术专业目前还没有形成独立的体系,只是在相关专业(如工业电气自动化、机电一体化等)的基础上进行了简单的删减修改而来,缺少系统性和独立性。在实际课程教学中发现在本专业的中后期核心课程教学中,目前还没有形成完善的课程体系和实训体系,有待高职教师在实际教学中进行摸索和提炼。[1-3]
为了解决高职工业机器人技术专业核心课程“工业机器人应用系统集成”中实训平台缺失的问题,调研了我省诸多企业(吉利汽车、东江科技、福爱电子、贵阳卷烟厂等),得出目前已经有很多规模较大企业已经使用工业机器人代替工人进行自动化生产,我省工业机器人在高端制造业中有较为广泛的应用,在高职教育中,无论是从成本还是教学的角度考虑,都不可能将工业机器人的所有应用都兼顾到,只能根据企业需求,对工业机器人的典型应用进行研究,从中选取应用较为广泛的一个方面入手,进行工业机器人系统集成设计。为了让高职学生更加接近一线企业,了解企业的生产方式,以汽车行业使用较多的某型零配件为目标产品,构建了ABB工业机器人打磨筛选分拣工作站实训平台。[4]
1 ABB工业机器人打磨筛选分拣工作站设计
1.1 工作任务的确定
在构建工业机器人工作站项目前,需要认真详细地了解工业机器人的工作任务,工作任务是整个工作站系统集成设计的核心,所有的设计都必须围绕这个工作任务来开展。工业机器人工作站的工作任务决定了工作站项目中重要部件和功能的选型,如工业机器人本体的选型,工艺流程的设计,重要附件的选用,主要外部设备的选用,以及PLC与工业机器人通讯方式及节奏。所以必须认真且详细地研究分析工业机器人工作站的工作任务,否则就会造成工业机器人系统集成设计达不到用户所预期的设想效果,严重时,甚至导致整体设计项目错误,造成无法挽回的损失。[5]
设计的工作站以某企业某型汽车金属内饰产品的打磨检验筛选存储为工作任务,该产品的相关技术参数及要求如下:
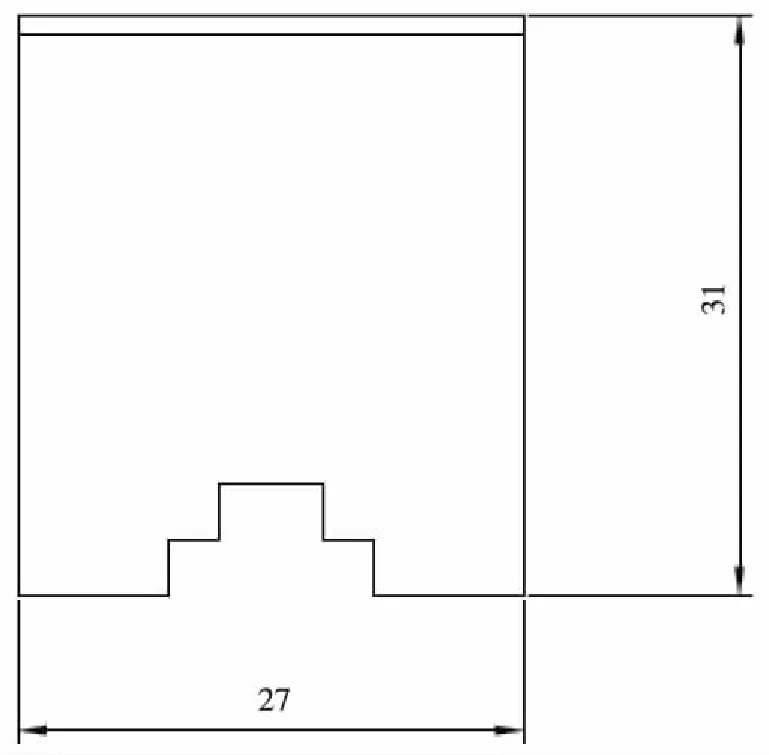
图1 加工产品零件图
技术要求:
(1)产品零件为块状,工件长度(28mm至68mm),宽度(16mm至45mm),厚度(6mm),材料为45号钢。
(2)要求在短时间内打磨并检测零件的上表面,误差不能超过0.1mm,表面粗糙度要求Ra3.2以下。
该产品零件批量大,需要进行打磨,分拣筛选,合格品入库,不合格品放置指定区域,搬运精度要求:重复定位精度在0.1mm以内,要求工业机器人的工作范围:550mm。设计以搬运并打磨抛光工件后,组装、检查合格后,再将合格件放回指定仓储位置。该零件以前由人工作业加工效率低,产品一致性难以保证。对打磨工人的技术要求也较高,且劳动强度大、时间长、工作条件恶劣,容易引起职业病的发生,是极大的隐患。
通过使用工业机器人代替部分人工作业,不但可以将工人从恶劣的生产环境中解放出来,还可以提高生产效率,降低生产成本。设计的教学实训平台,基于实际工业领域的打磨筛选分拣要求,借鉴在教学上已经成熟的相关实训平台,结合工业机器人应用系统集这门课程的实际要求,设计了一套ABB工业机器人打磨筛选分拣工作站。
ABB工业机器人打磨筛选分拣工作站教学实训平台包括了ABB工业机器人应用技术、力度反馈打磨技术、视觉检测技术等。本工作站旨在培养高职学生的实际动手能力和项目整体设计能力,以及ABB工业机器人编程能力和西门子S7-1200 PLC系统硬件的实际应用能力和软件实际编程,以及调试解决现场实际问题的能力,达到快速提高高职学生职业技能,提高他们就业竞争力的目的。
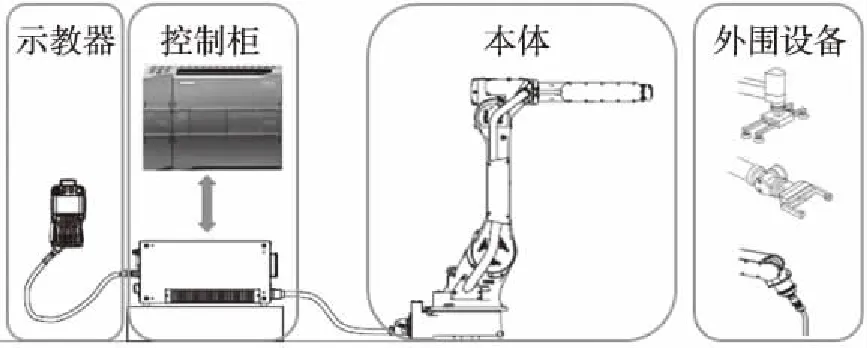
图2 ABB工业机器人系统构成示意图
接下来,必须参照工作任务,设计选用工作站相关部件,没有工作站部件的辅助工作,工业机器人就只是一个半成品,一个运动部件。所以工作站辅助部件的选择也非常重要的环节。
需要根据工业机器人将进行的动作,是打磨抛光操作,还是检验检测等,以及整个系统工作所需要达到的工艺标准,加工步骤等,都是需要深度综合思考的问题。只有正确的合理的设计工作站的相关部件,让工作站辅助部件与工业机器人完美的配合起来,才能使设计的工业机器人打磨筛选分拣工作站发挥出其应有的作用。
1.2 整体设计思路
根据工作任务要求,综合性能价格、通用性以及先进性、安全性、稳定性、兼容性和可扩展性以及后期可维护性考虑,设计采用目前主流的ABB IRB120型工业机器人为主体,西门子公司S7-1200 PLC、昆仑通泰触摸屏为核心元件。由于需要分拣筛选,要对产品状态和是否合格进行检测识别,视觉系统就像工业机器人的眼睛,必须依靠视觉系统对物体进行定位以及对打磨后的产品进行是否合格的识别,采用性价比较高的COGNEX公司 In-Sight 8000 视觉系统,该视觉系统是全系列独立视觉系统,提供了 VGA、1MP、2MP 和 5MP 分辨率的视觉系统,以及可采用 VGA、1MP 和 2MP 分辨率的色彩选项。这些视觉系统支持使用千兆以太网进行高速通信,能够快速采集和双倍性能,完全满足工作站筛选检测零件的要求。ABB IRB120型工业机器人与In-Sight 8000 视觉系统通过标准工业网口和标准通讯协议完成通讯。
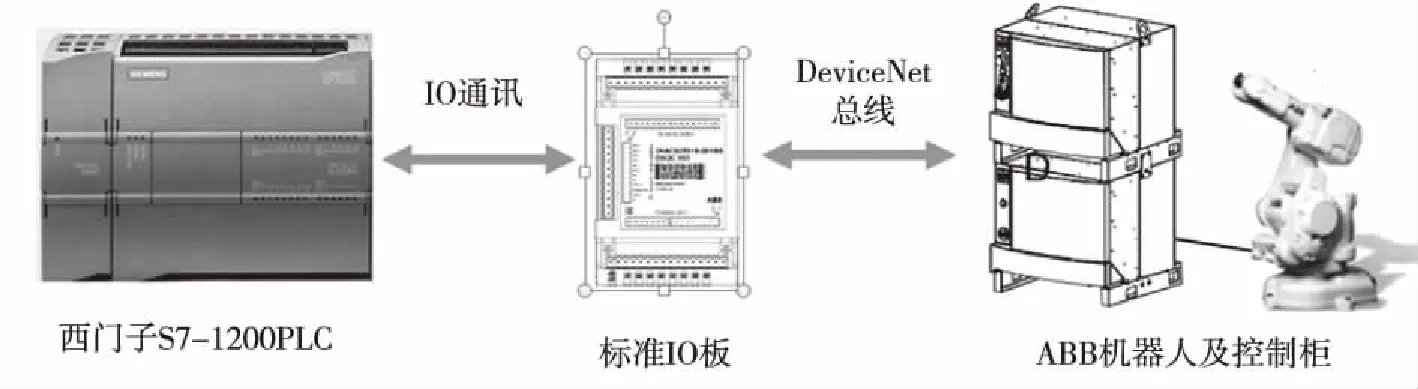
图3 工业机器人工作站的通讯架构
当工作站主要设计方案确定下来后,就可以进行工业机器人的具体选型,工业机器人是整个工作站集成应用系统的核心元件。目前工业机器人品牌型号较多,不同品牌型号的工业机器人特点、擅长领域各不相同,价格也不同。首先需要根据工作任务的工艺要求和精度要求来初步选定工业机器人的品牌,其次再根据工作任务、操作对象、工作站部件以及工作运行环境、速度等因素,选取所需工业机器人的负载、运动速度、最大运动范围、运行精度、IP防护等级等主要性能指标,最后再确定工业机器人的具体型号。设计时还需要详细考虑系统先进性、配套工艺软件、I/O接口、总线通信、外部设备配合等问题。在满足工作任务的前提下,尽量选用当前可靠稳定的主流控制系统、I/O接口要有预留(一般为总量的10%)、以及配套工艺软硬件的品牌和型号和接口及通讯协议匹配等,以便整个工作站系统具有一定的扩充性。价格也是选型必须考虑的重要问题,并兼顾高职教学用的特点,最终选定性价比最高的ABB IRB120型工业机器人作为ABB工业机器人打磨筛选分拣工作站用工业机器人。
为了满足工作站需要打磨、筛选、分拣等功能,在购买ABB IRB120型工业机器人时,还需另外采购以下功能模块:1.709-1DeviceNet Master Slave基 于PCIe插槽,主站从站均可以; 2.840-3 PROFINET 1O Anybus Device基 于现场总线适配器插槽Anybus,只能做从站; 3.613-1碰撞监控Collision Detection; 4.611-1路径恢复FPath Recovery;5. 616-1套接字通讯PC-interface;
ABB工业机器人教学实训平台,利用工业机器人自动夹取工件,在砂带机上进行工件表面的自动化打磨抛光,产品检测并搬运回库,能够有效实现代替工人对零件的打磨抛光工作,让学生身临其境,运用自己所学知识,实际动脑动手,在理解工作站设计加工工艺的基础上,完成整个工作站的运行调试工作。
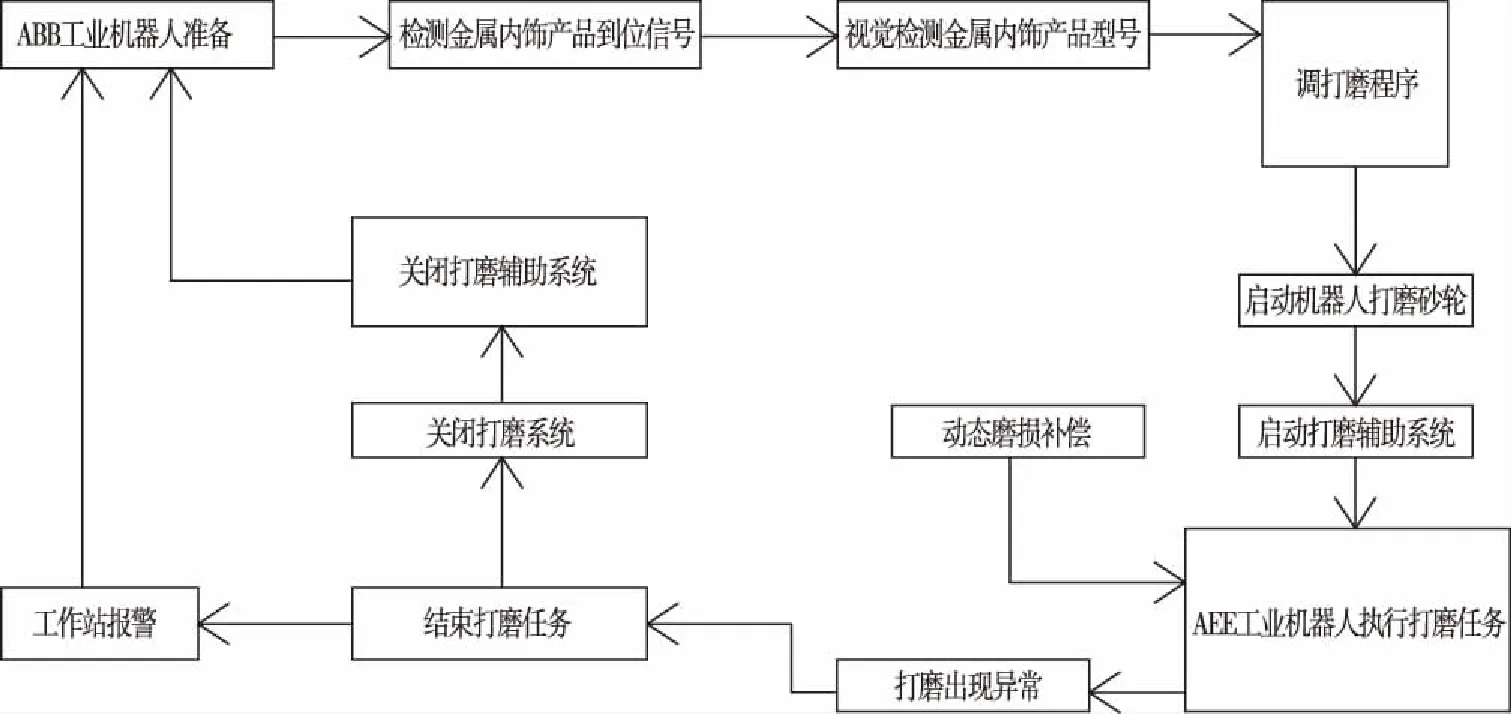
图4 ABB工业机器人打磨工作站示意图
根据实训平台抛光打磨工艺的要求,抛光打磨工序可分为粗抛光打磨和精抛光打磨两个不同等级。粗抛光打磨主要针对的是产品去毛刺、分型线、浇冒口、分模线等;精抛光打磨主要针对产品表面处理精抛等。由于铸件的重复精度及表面粗糙度差,抛光打磨工具很容易产生磨损,在抛光打磨时力度的控制变化等不确定因素影响,导致了机器人抛光打磨应用相对复杂和实施中存在一些困难因素。粗抛光打磨:根据产品的公差尺寸和要求,机器人按照设定轨迹工作,对产品表面进行粗糙的抛光打磨处理。常用于铸件去毛刺、合模线等应用。恒定的速度配合大功率的抛光打磨工具;变轨迹速度保证抛光打磨工具在遇到工件表面的时候,可以保持恒定的切削力,通过变速达到保护抛光打磨工具的目的。
1.3 工业机器人工作站的电气控制系统设计
在详细了解工作任务及工作工艺步骤和选型的各种外围设备接口的情况下,确定系统所需的全部输入设备和输出设备,从而确定ABB IRB120型工业机器人和西门子S7-1200 PLC相关的输入/输出设备,统计ABB工业机器人和西门子S7-1200 PLC需要的I/O点数后,分配I/O点,画出机器人和西门子S7-1200 PLC的I/O点与输入/输出设备的连接图或对应关系表,设计ABB工业机器人和西门子S7-1200 PLC外围硬件线路,画出整个系统其它部分的电气线路图,包括主回路和没有关联PLC的控制电路等。
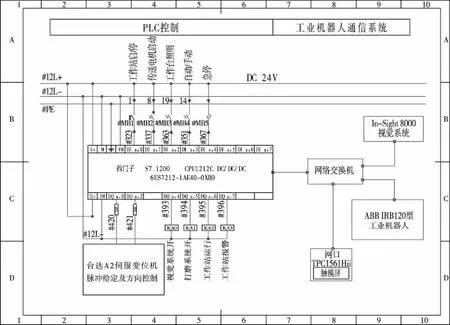
图5 ABB工业机器人打磨工作站电气原理图
以ABB IRB120型工业机器人和西门子S7-1200 PLC为中心的的I/O连接图和PLC外围电气线路图及强电动力回路构成了工业机器人工作站系的电气原理图。至此,整个系统的硬件电气原理图线路基本确定。
在确定工作站电气原理图后,需要跟机械设计工程师详细沟通,了解所有电气元件的安装尺寸和位置,以原理图为根据,绘制电气安装图,检查无误后,交给电工进行现场施工,在施工过程中,电气设计必须实时跟踪安装过程和进度,遇与设计不符的情况,现场及时根据实际情况进行处理,为后期顺利调试奠定基础。
最后,进入工业机器人工作站系统安装与调试阶段,上述所有步骤完成后,就可以进入ABB工业机器人打磨筛选分拣工作站系统安装、调试阶段。在工业机器人工作站的安装阶段,必须严格遵守施工规范,保证施工质量,注意施工安全。在带领学生进行系统调试通电时,由于有一定的危险性,原则是学生只能在安全区域观看学习。在认真检查主回路和控制回路,检查主要电源,杜绝短路现象后,依据工作站电气原理图,可以分区域分阶段进行逐步的通电。调试中,应遵循在安全的前提下,首先实现手动功能,脱开负载进行测试,正常后再带负载测试。其次,是进行分块进行调试,最后再整体整合。在调试中以工业机器人工作站电气原理图为主,遵照客观实际,对工业机器人和西门子S7-1200 PLC进行程序编辑对相关设备参数进行设置。调试时,尽量考虑到各种使用情况和极端情况,尽可能的提早发现问题并及时处理。在安装与调试中,人身安全和设备安全问题同等重要,必须时刻遵照安全规程进行工作。
2 结论
建设高职工业机器人技术专业核心课程“工业机器人应用系统集成”中,自己动手设计构建ABB工业机器人打磨筛选分拣工作站,带领高职学生自己动手搭建并调试成功ABB工业机器人打磨筛选分拣工作站,师生收获良多。高职院校工作站系统集成,既要满足教学需求,同时也要尽量贴近工业生产实际,使学生尽量接近甚至还原真实的工业生产环境,为学生创造良好的学习环境和条件,为学生就业后能快速适应工作岗位,实现无缝上岗奠定了基础。
