基于离散度的药柱端面银丝位置视觉识别方法 ①
2020-04-28姜春英闫子龙袁睿斌杨时敏
姜春英,闫子龙,袁睿斌,张 渝,杨时敏
(1.沈阳航空航天大学 机电工程学院,沈阳 110136;2.上海航天化工应用研究所,湖州 313002)
0 引言
固体推进剂是一种具有特定性能的含能复合材料,是导弹、空间飞行器等各类固体发动机的动力源[1]。通过在固体推进剂药柱内埋金属丝,可增加燃烧速率,达到提高总压的目的[2]。该类包覆药柱通常均匀内埋6根银丝[3],为了增大燃面,缩短燃面爬升坡段,需要在药柱端面上沿银丝方向进行钻孔处理[4]。
钻孔的传统操作为人工手钻,由于药柱属于易燃品,所以钻孔过程具有一定的危险性;药柱端面的银丝不易观察,使得人工手钻耗时较长,且质量一致性差,严重影响了药柱整形的加工效率与整形的精度和质量[5]。为确保整形精度和质量,保证操作人员的生命安全,有必要利用自动化操作手段取代传统的钻孔操作环节;而如何对药柱端面的银丝位置进行准确识别,引导钻头进行精确钻孔对能否实现自动化钻孔操作起着决定性作用。
国内外关于药柱端面银丝位置识别的研究相对较少,国内杨时敏等提出了一种图像特征点筛选提取的方法对药柱端面银丝位置进行识别定位[4]。本文采用机器视觉的方法[6],根据图片特征生成自适应感兴趣区域,通过旋转搜索模板比较相关性与滑动窗口的离散度准确识别各个银丝的位置。
1 药柱端面银丝位置识别算法
药柱端面如图1所示,图中黑色箭头所指的亮点即为其中一根银丝的位置,每个药柱均布有6根银丝,大致成正六边形分布。对于同一型号的药柱,虽然银丝分布形状大致相同,但由于药柱生产过程会使银丝位置产生一定的偏差,所以钻孔加工前,需要对每个银丝位置进行准确识别。
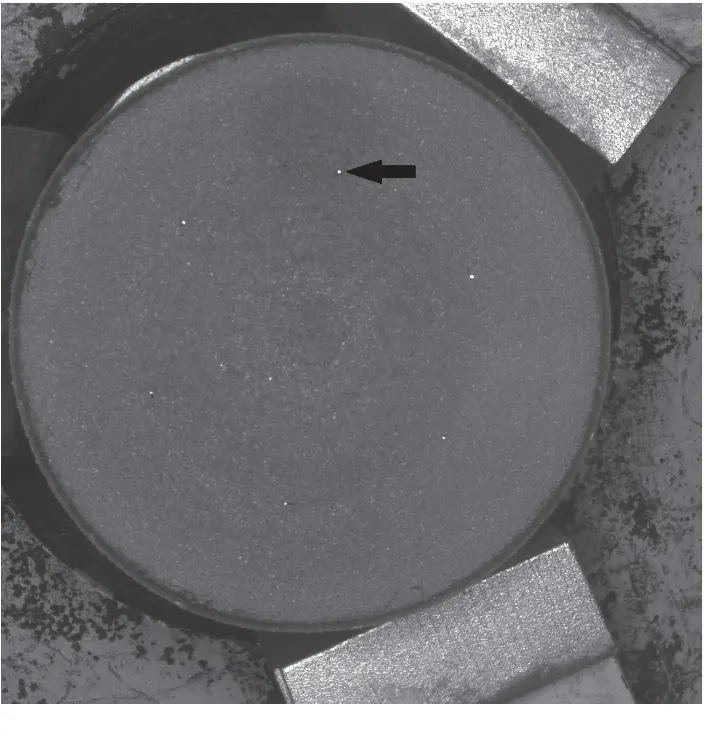
图1 药柱端面图
根据银丝与药本体灰度值对比度的差异,对图片进行降噪滤波处理,生成自适应感兴趣区域后,通过旋转生成的搜索模板比较相关性后,对银丝所在的子区域进行粗定位,最后在子区域内进行窗口滑动比较离散度找到银丝位置,定位算法整体流程如图2所示。
1.1 图片滤波去噪
药柱端面的平整度、残留的银丝碎屑、光照环境的变化均会对银丝位置的准确识别产生较大的干扰,选用高斯函数对图片进行平滑降噪处理[7]。采用的高斯函数如式(1)所示。图3为感兴趣区域内像素值的三维表示,其中高度信息代表像素值大小。从图3可看出,滤波后图片相比滤波前趋于平滑,便于后续处理。
(1)
式中σ为高斯曲线的标准差,影响图像的平滑程度。
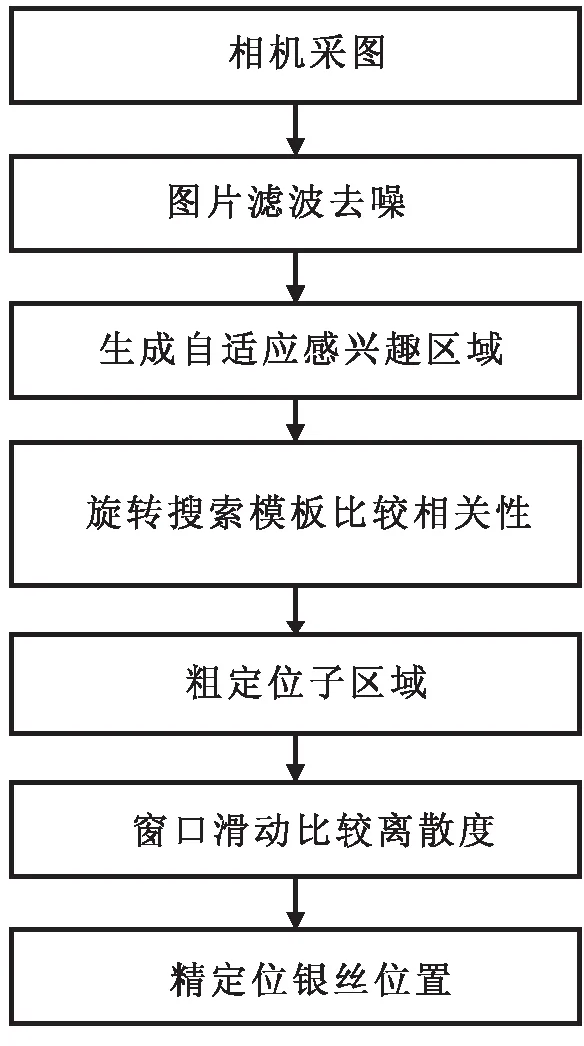
图2 定位流程图
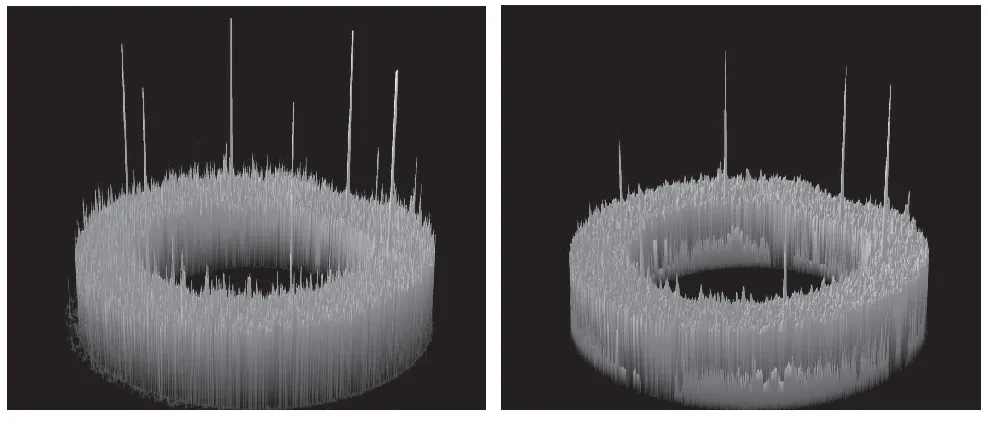
(a)滤波前 (b)滤波后(σ=1)
1.2 生成自适应感兴趣区域
根据药柱端面银丝的分布规律设定感兴趣区域为圆环,如图4(a)所示。在感兴趣区域内寻找银丝,一方面排除了图像中的其他干扰点,提高了银丝位置识别的准确度;另一方面减小了寻找面积,加快了处理速度[8]。药柱每次被气动夹爪夹紧后,在视场内会有一定的偏移,设定固定位置的感兴趣区域在偏移过大时,将会使得银丝越界,如图4(b)中方形框所示,该银丝将不会被识别出。通过生成自适应感兴趣区域,提高了识别的准确性。

(a)环形感兴趣区域图 (b)银丝越界图
自适应感兴趣区域的生成分为以下5个步骤:
(1)设置自适应阈值。通过分析图片特征,由于药柱边缘与药柱表面灰度值有较大的差别,取药柱表面的灰度均值作为分割的阈值,将药柱表面区域与其周围区域区分开,为步骤3轮廓提取做准备。由于光照等因素的影响,药柱端面的灰度值有一定的波动,使得设置固定的阈值缺乏适应性,需根据每幅图片特征生成自适应阈值。在取得正常图片的情况下,视场中心一直位于药柱端面上,将视场中心作为阈值计算方框的中心,计算方框内的像素均值T作为阈值,通过多次处理得到,方框的边长可设定为50~100个像素。
(2)阈值分割。根据式(2)利用阈值T将图片分割为二值图如图5(a)所示[9]。

(2)
式中f(m,n)为像素坐标系下(m,n)处阈值分割后像素值;p(m,n)为像素坐标系下(m,n)处原图像素值。
(3)提取药柱轮廓。通过边界追踪算法找出阈值分割后的二值图中的各个轮廓[10],各个轮廓所围的区域如图5(b)所示;最大的轮廓即为药柱端面轮廓,该轮廓所围的区域的二值图如图5(c)所示。
(4)寻找药柱端面中心。对步骤3提取出的药柱端面轮廓二值图,求出轮廓的外切矩形如图5(c)所示,矩形对角线的交点即为所求的中心。取轮廓半径为矩形长宽均值的一半绘制药柱的轮廓图如图5(d)中红色圆所示。
(5)生成感兴趣区域。根据步骤4找到的药柱端面的中心生成感兴趣区域如图5(d)所示。对于同一型号的药柱,银丝分布在一定半径范围内波动,根据该型号药柱银丝分布半径,设置感兴趣区域使得银丝位于圆环中间。感兴趣区域过大,将会引入过多干扰;感兴趣区域过小,由于银丝位置波动可能越界。圆环内外径可根据各个型号药柱银丝波动大小适当调整。
1.3 感兴趣区域细分处理
为了寻找银丝点所在的位置,对圆环感兴趣区域进行细分。细分份数过小时,后续算法生成的模板值过小,子区域相关性区别小,容易受干扰的影响;细分份数过大时,耗时较长。
本文算法所用药柱直径为65 mm,通过多次测试,细分份数在区间[300,900]时,相关性区别较大且耗时短。本次算法将感兴趣区域细分为600份如式(3)所示,对细分的每一份生成方形子区域,子区域如图6所示。为了方便坐标计算,后续算法均为以图像坐标系下x轴正方向为起点。
(3)
式中θi为细分后位置i的角度。

(a)阈值分割图 (b)轮廓寻找图
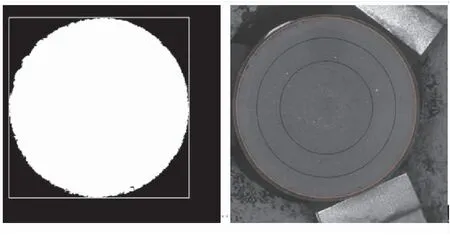
(c)轮廓提取图 (d)感兴趣区域生成图
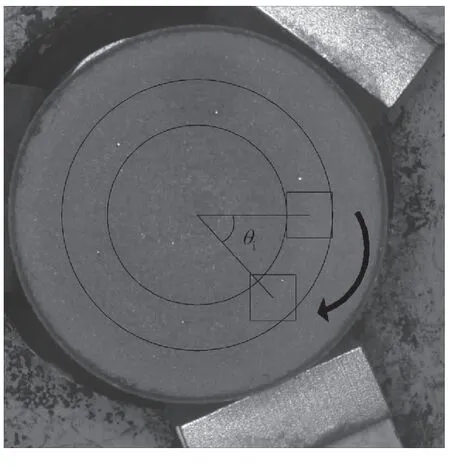
图6 感兴趣区域细分图
根据1.2节找到的感兴趣区域中心,生成的方形子区域的数学表示如式(4):
(4)
式中a、R、r、x、y、xi、yi分别为子区域边长、感兴趣区域圆环的外圆半径、感兴趣区域圆环的内圆半径、感兴趣区域圆环中心的x坐标、感兴趣区域圆环中心的y坐标、细分的位置i处子区域中心的x坐标、细分的位置i处子区域中心的y坐标。
对于细分后的子区域,无银丝的区域像素值分布比较均匀,即离散度较小,而有银丝的区域,像素值会有较大的波动,即离散度较大。采用式(5)进行细分后各个子区域的离散度计算,感兴趣区域细分后的离散度图如图7所示。
(5)
式中μ、δ、M×N分别为像素值的均值、像素值的离散度、图像的大小。
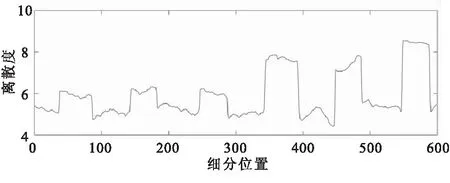
图7 离散度图
1.4 银丝粗定位寻找
对感兴趣区域细分处理后,进行银丝的粗定位。根据子区域离散度的分布情况生成搜索模板,通过旋转搜索模板比较相关性找到银丝所在子区域的位置。
由图7可知,离散度值近似矩形波。银丝所在的子区域,离散度较大,将会出现波峰。对感兴趣区域进行细分后,银丝会位于多个子区域内,形成离散度图内的脉冲宽度,当银丝位于子区域中间时,对应于一半脉冲宽度的位置。由于银丝大致成正六边形分布,设定周期为100时,在各个周期内均会有一个脉冲宽度,所以每个周期内都可找到一个银丝的位置。
根据感兴趣区域细分后的离散度分布情况,提出了一种旋转搜索模板的方法,根据式(6)生成周期为100的搜索模板,如图8所示。
(6)
式中 定义“/”为相除取整运算,k、i、t、Ti分别为细分值映射在一个周期内的值、细分的位置值、周期数、模板值。
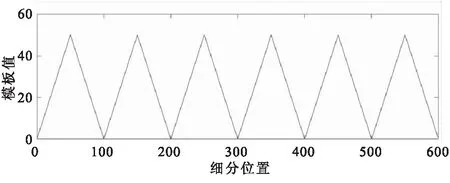
图8 搜索模板图
生成搜索模板后,旋转搜索模板对银丝位置进行寻找,根据离散度的分布,在一个周期内旋转搜索模板得到一个银丝子区域位置后即可得到其余银丝的子区域位置。根据式(7)将搜索模板进行逆时针旋转,即在一个周期内将模板向左依次移动一个细分值(旋转的方向可任意,本文通过逆时针旋转)。
(7)
每次旋转搜索模板后,与1.3节得到的细分时各个子区域的离散度值相乘,得到银丝位置的相关性如式(8):
(8)
式中Vj为第j次旋转时银丝位置的相关性。
在模板旋转过程中,当模板的峰值位于各个周期内一半脉冲宽度的位置时,相关性将会最大,如式(9)所示。旋转一个周期得到的银丝位置相关性如图9所示,图中所标记的相关性最大的位置即为所求。
P=j{maxVj},(j=0~99)
(9)
式中P为相关性最大时搜索模板旋转的次数。
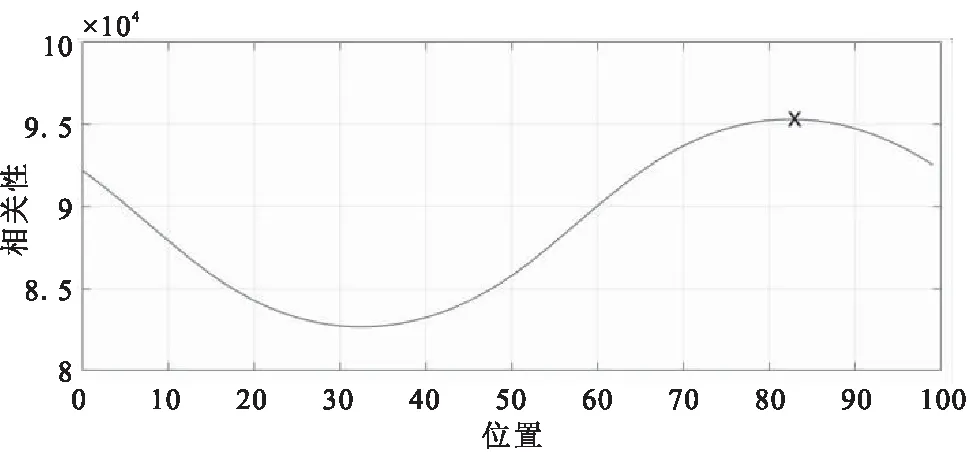
图9 银丝位置相关性图
根据搜索模板的特性,在一个周期内,峰值的位置与起点的位置相差π/6,即找到的最大相关性的位置与银丝所在的方形区域相位差为π/6,根据式(10)、式(4)可得到第一个银丝所在的子区域的位置:
(10)
式中β0为第一个银丝所在的子区域的角度。
得到第一个银丝所在子区域的位置后,由式(11)、式(4)可得到其余5根银丝所在子区域的位置,6根银丝粗定位后的子区域如图10所示。
(11)
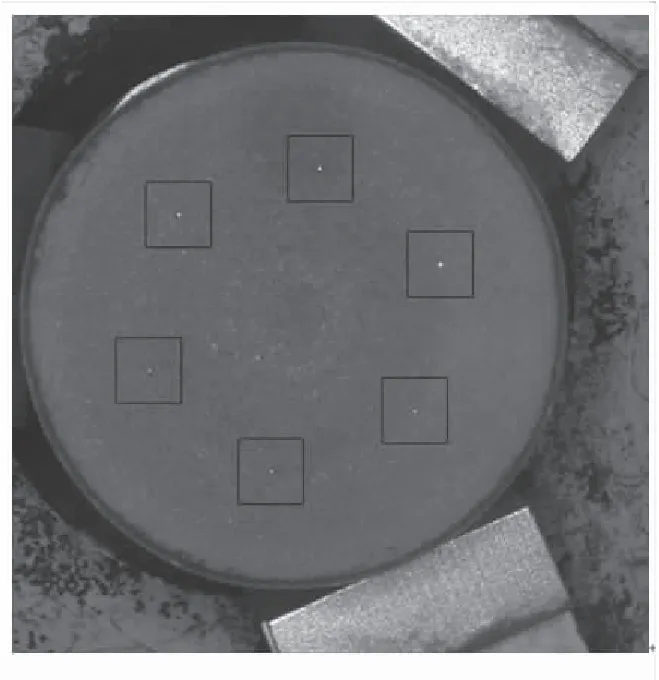
图10 粗定位位置图
1.5 银丝精定位寻找
粗定位找到银丝所在的子区域后,需要在子区域内精定位找到银丝的准确位置。粗定位找到的其中一个子区域如图11(a)所示。
由于车刀的磨损,药柱端面车削时可能会出现银丝残留的情况如图11(b)所示。出现银丝残留时,银丝将会沿着车刀运动的方向弯折约90°紧贴在药柱端面,由于银丝的弯折使得光线基本上沿平行于药柱端面的方向反射,很少反射到相机CCD(图像传感器)靶面,由图11(b)中箭头所指的位置可看到,银丝根部的像素值将会特别小。
在粗定位的子区域图中可看到有银丝的位置与没有银丝的位置像素值有较大的差别,可在子区域内直接通过像素值的大小判断银丝所在位置,这种方法对于银丝完全切断的药柱适用,但对于有银丝残留的药柱,银丝在药柱端面为一长线。因此,无法确定银丝根部位置,将会产生较大的定位误差。
由于银丝出现弯折时银丝根部与银丝的像素值有较大的差别,即离散度较大,而且对于粗定位的子区域图,在没有银丝的位置像素值分布均匀,即离散度较小,在有银丝的位置灰度值有较大的跳动,即离散度较大,所以通过判断离散度即可得到银丝的位置。
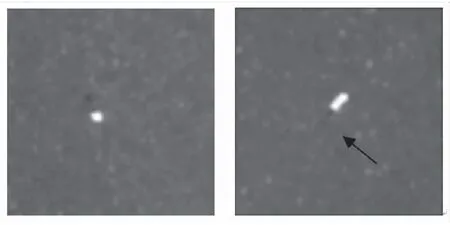
(a)粗定位银丝子区域图 (b)银丝未完全切断图
在精定位到的155×155子区域内,建立11×11的窗口在子区域内滑动,根据式(5)计算每次滑动时窗口内的离散度,离散度最大的位置即为银丝所在的位置。精定位找到的银丝位置如图12所示。
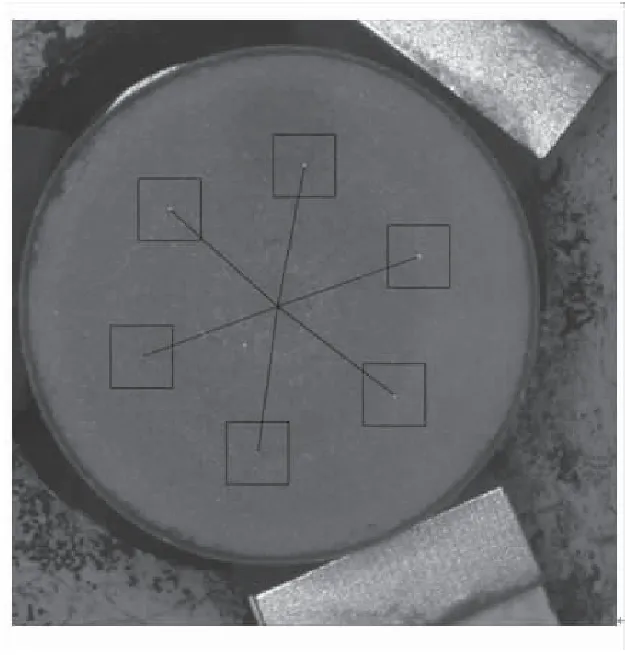
图12 银丝精定位图
2 实验验证
2.1 药柱端面银丝识别视觉系统
自动药柱整形系统中,药柱端面银丝位置识别视觉部分如图13所示,由以下三部分组成:图像的获取、图像的处理和分析、与PLC(可编程逻辑控制器)进行通讯。

图13 药柱端面银丝识别视觉系统
图像的获取设备由高分辨率CCD黑白相机和环形光源组成,通过采用500万像素的CCD黑白工业相机提高采集的图像的质量[11],亮度均匀的环形光源增强银丝与药柱端面的对比度[12],便于对银丝的位置进行识别;图像的处理与分析在PC中VC++(Microsoft Visual C++)环境下进行;PC与PLC通过OPC(OLE for Process Control)进行通讯。在自动药柱整形系统到达药柱端面银丝识别工位后,PLC发出定位拍照指令,相机采集到药柱端面图后在PC上进行处理,分析得到各个银丝的位置,将位置发送给PLC的同时发出定位完成指令,PLC收到定位完成指令后根据处理得到的银丝位置执行钻孔工位开始钻孔。
2.2 钻孔实验
为了验证银丝位置识别算法的准确性,在药柱整形加工系统上进行位置识别与钻孔实验。对设备相机进行手眼标定,并计算确定其坐标系和加工系统末端坐标系之间的关系后,对同一型号药柱经多次车削获得的药柱端面图像进行位置识别、钻孔[13]。
银丝位置被准确识别后,将会引导设备进行钻孔操作,图14左右两侧为2次钻孔实验的图片。
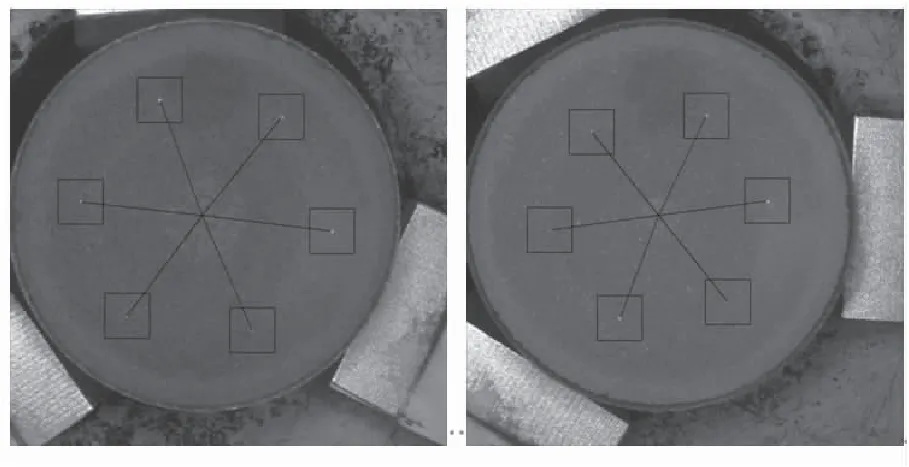
(b)银丝位置识别图
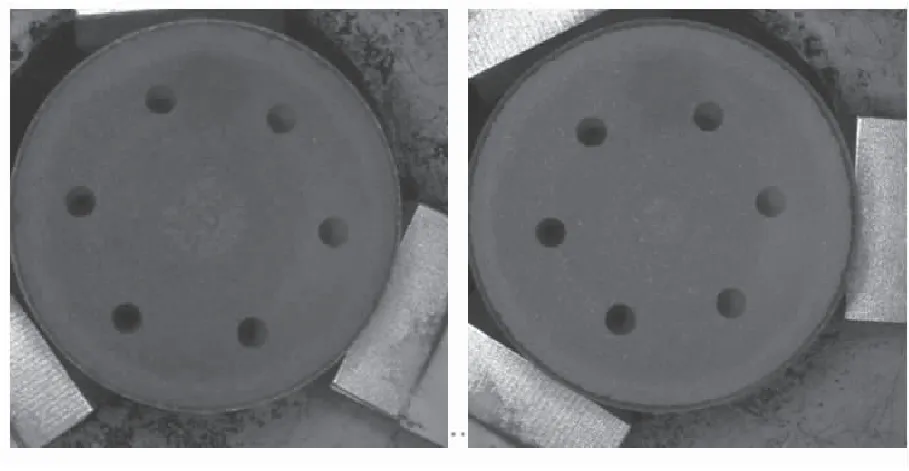
(c)钻孔图
去除由于车削问题使得部分银丝未能露出的图片,进行了2组实验,每组实验进行30次车削钻孔即每组对180个银丝进行位置识别与钻孔。表1为实验的统计数据,其中正确钻孔的实现主要取决于视觉识别精度、手眼标定精度、机械系统精度三方面。严格控制三方面精度,其中视觉识别精度<0.2 mm、手眼标定精度<0.1 mm、机械系统精度<0.02 mm,能够保证银丝的定位精度控制在0.4 mm以内。通过实验与数据统计可得到,钻孔成功率大于所要求的99%,药柱端面银丝位置识别算法可实现对药柱端面银丝位置的准确识别,满足自动化所需工艺过程连续的批量生产需求。
对药柱端面银丝识别1次得到各个银丝的位置,并引导整形加工系统钻孔为一连续的过程,而工人手钻需要对每个银丝重复进行位置对准。实测表明,银丝自动识别与钻孔的工序过程与人工操作相比,效率提升5倍。
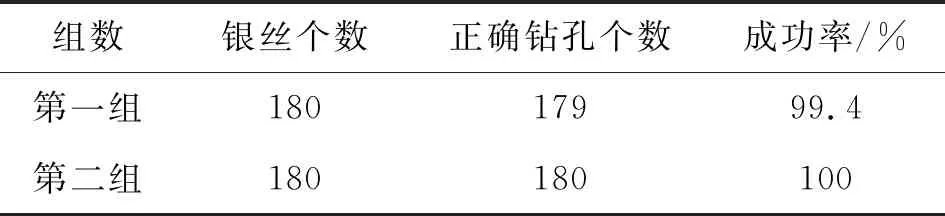
表1 钻孔成功率
3 结论
本文提出了一种基于离散度的药柱端面银丝位置视觉识别方法,根据图片特征生成自适应感兴趣区域后,采用旋转搜索模板比较相关性的方法粗定位银丝子区域位置,通过比较滑动窗口的离散度的方法精定位到银丝的位置。实验表明,该方法识别率大于所要求的99%,可快速准确实现银丝位置的识别,满足自动化批量生产的需求。
