基于TOF技术的输电带电作业安全监测与预警系统
2020-04-27隆晨海杨淼熊子萱李金亮李文波
隆晨海,杨淼,熊子萱,李金亮,李文波
(1.国网湖南省电力有限公司电力科学研究院,湖南长沙410007;2.国网湖南省电力有限公司永州供电分公司,湖南永州425000)
随着我国电网的迅速发展,带电作业已经成为我国输电线路抢修消缺、电网设备检测以及维护的重要手段。输电带电作业是一项 “高空、高压、高危险”工作,作业人员必须在规定的安全范围内工作,与不同电位的物体保证足够的安全距离,带电作业安全防护是带电作业顺利实施的关键因素。目前,我国输电带电作业的人员安全主要是依靠具有丰富实际操作经验的监护人员的监督及作业人员的自觉性来实现。在实际的作业过程中,由于现场作业点多面广、工作繁重,作业人员易疲劳,精力不够集中,容易发生违反操作规程、忽视安全距离等行为,从而导致安全事故的发生。
在安全预警方面,国内已有文献 [1]提出一种新型带电作业电场测量预警系统;文献 [2]提出一种可以检测超高压输电线周围工频电场强度并能够直观显示的便携式测量装置;已研制的带电工作距离报警包括手表式近电报警器和安全帽加装近电报警器,还有较少使用的红外对射报警器和复杂带电作业电力施工的安全报警装置。国外已有测量距离功能的专业图像分析系统,例如Image-Pro Plus是顶级的图像分析系统包,还有速度测量系统(RC Speed Test)可以运行于IOS系统中。但该两种系统功能单一,不能有效地预防操作人员误入带电间隔和人员触电事故的发生,而且成本昂贵,操作计算复杂,很难普及化使用。总体来讲,国内外在带电作业安全距离预警方面尚未有普及运用的预警系统。
针对目前我国输电带电作业中安全监控及预警手段和方法缺乏的现状,提出基于TOF技术的输电带电作业实时安全监测与预警系统,实时检测安全距离,开展人员危险动作预警,对预防或减少带电作业人身伤害等事故的发生具有十分重要的工程实践价值。
1 TOF测量原理
TOF技术是机器视觉工业重要里程碑,通过使用低成本CMOS像素阵列和主动调制光源技术来提供三维场景的距离景深图[3-4]。因此不同于单点逐点扫描方式,该技术每个像素都能测量对应目标体的亮度和反射回来的调制光的到达时间,从而计算出该点对应的距离景深。
TOF测量的基本公式:

式中,由光源发出的光脉冲信号的波长λ,一般约为850 nm;n是光脉冲的数目,Δφ是与最终结果精密度密切相关的延迟相位;已知光速c,并设调制频率为 40 MHz,计算可得最大测量距离为3.25 m。因为调制频率越高,量程就越小,而且一般TOF技术的最大测量距离小于光在半个周期内的飞行距离,所以这也是未来3D-TOF技术发展需要克服的一个难题[5-6]。
图1为TOF的测量信号示意图,系统光源发射出经过调制后的光波频率为20 MHz的正余弦的调制信号。首先设定调制波形的初始相位φ0=0°,光脉冲返回后信号相位为φ1=240°,那么可得总的相位延迟为Δφ=240°,因此就可以计算出距离d=5 m。

图1 TOF摄像机测量系统信号示意图
基于TOF相机可实现对工作区域的实时监测并获取高精度的距离信息,为作业中的安全隐患提供实时可靠的预警信息。
2 基于TOF安全距离监测方案
2.1 TOF相机选型
TOF相机选型应满足的带电作业安全距离监测需求如下:
1)输电带电作业安全距离大部分是0.3~5 m[7-8]。因此为了保证足够的视野范围,相机安装要求在距离工作区域5 m以外的位置,故深度相机的量程应在10 m以上。
2)为保证安全距离监测的实时性,相机的帧率应该在30 fps及以上。
3)为保证测量精度,深度相机在量程内的测距误差应在5 cm以内[9]。
4)为保证安装上的轻便性和系统自身的便携性,要求深度相机质量在1.5 kg以内,在此基础上相机尺寸也要尽量小巧。
由于国内的深度摄像机起步较晚,目前还没有精度和分辨率都达到需求的深度相机,而且主要研发方向是基于娱乐性的体感方向,因而选择进口Fotonic E70作为距离监测的传感器。选择的相机型号为E70 48W,该相机的主要性能参数见表1。
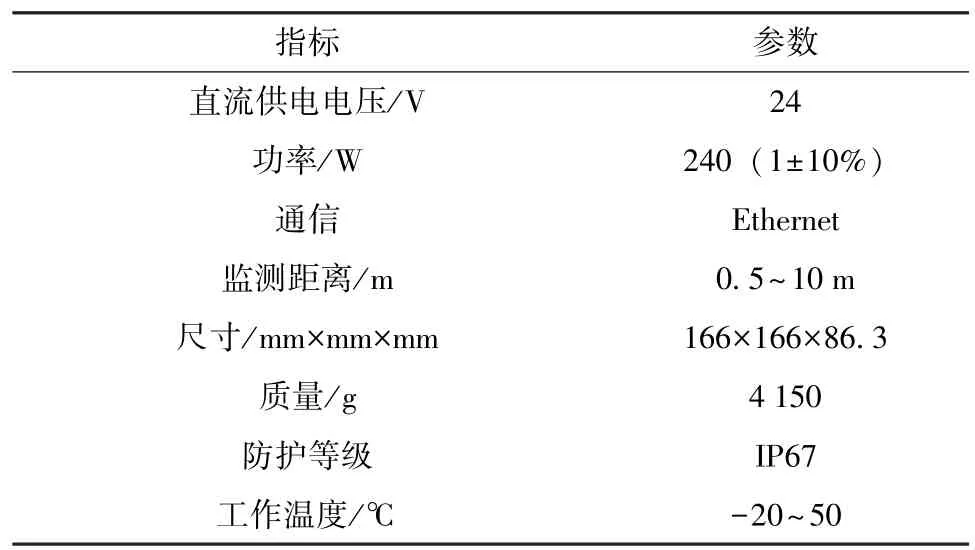
表1 E70 48W相机性能参数
2.2 基于TOF安全距离监测方案设计
根据所选带电作业杆塔和电压等级,设置高压输电线路杆塔参数、高压带电作业方式,系统自动计算安全监控方位和报警阈值。利用深度相机采集图像,对深度图像进行实时处理,计算带电作业人员的空间方位,测算作业方位的安全距离,并进行存储与分析处理。安全预警部分根据安全距离监测的结果进行分析,实现声、光等报警,并将处理的数据发送给地面基站或监控中心。基于TOF技术的距离监测方法流程如图2所示。

图2 距离监测方法流程
3 系统设计
输电线路带电作业安全监测与预警系统功能结构包括作业安全距离评估、安全距离监测、安全预警、设备装置,通信系统。其安全监测与预警系统的组成如图3所示,其中 “扩展部分”在后续可根据需要进行扩展,本文设计不涉及此部分内容。系统主要部件包括:主控板卡、网络设备、TOF深度相机、电源系统、报警设备等部分。

图3 系统组成
3.1 硬件设计
3.1.1 系统组成结构
硬件系统连接如图4所示,图中1为监控终端,2为无线通信链路,3为控制箱体,4为无线发射天线,5为显示屏,6为系统电源开关,7为声光报警设备,8为接线端子,9为处理器,10为无线路由器,11为3G/4G通信模块,12为控制电路板,13为电池,14为控制箱安装底座,15为控制箱安装支架,16为电源及信号线缆,17为深度相机,18为深度相机安装底座,19为深度相机安装支架。
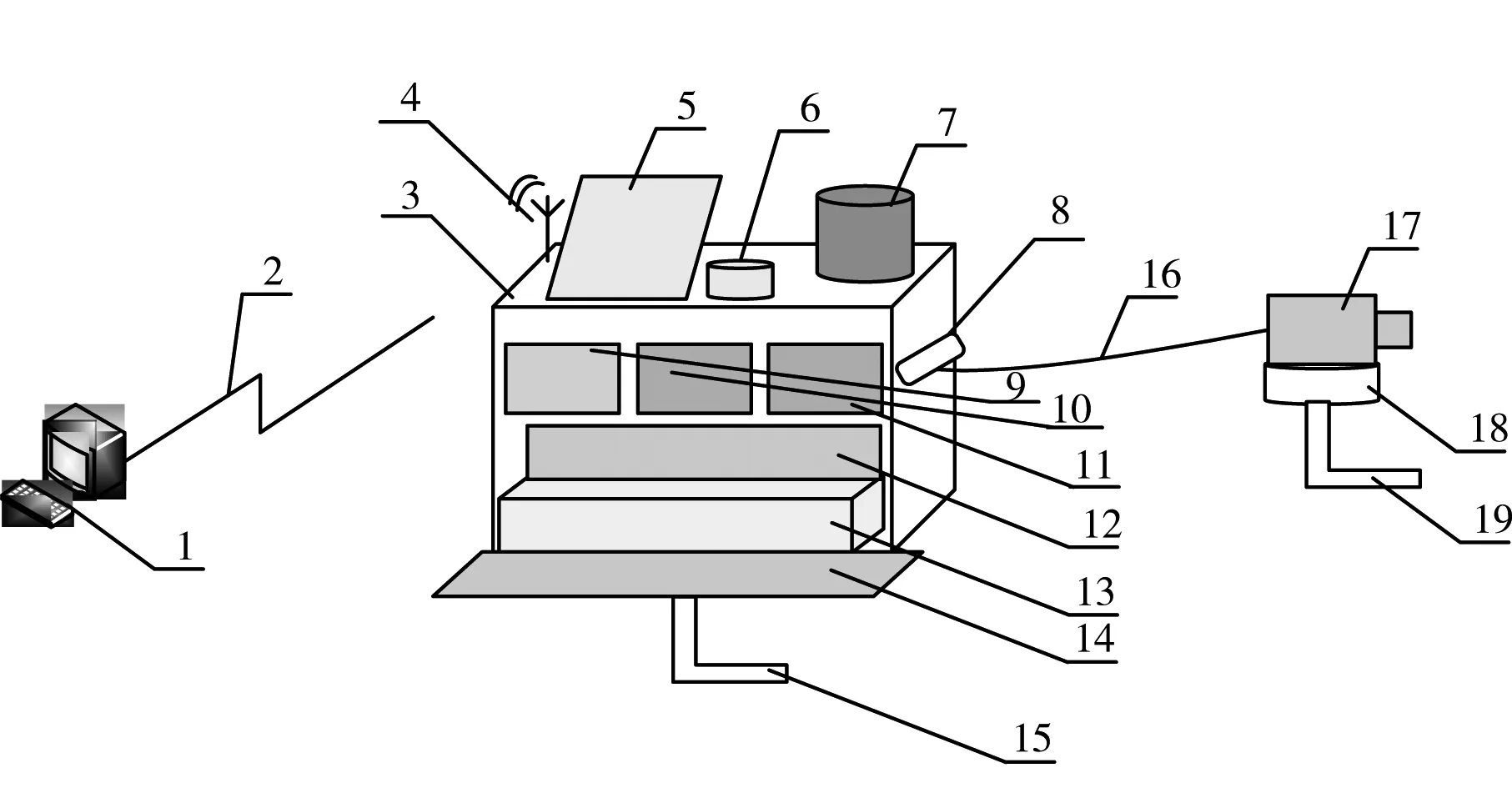
图4 监测系统组成结构
3.1.2 硬件系统工作原理
电池给声光报警设备、处理器、无线路由器、3G/4G通信模块、控制电路板、深度相机进行供电。其中电池的标称电压为24 V。控制电路板配有DC-DC 24 V转12 V电源模块和24 V转19 V的电源模块、19 V电源开关控制器、24 V电源开关控制器Ⅰ和Ⅱ、12 V和19 V电源接口、24 V电源接口Ⅰ和Ⅱ。
DC-DC 24 V转12 V电源模块和24 V转19 V的电源模块的输入均为电池的输出,通过两根电源线相连,并区分正负极。DC-DC 24 V转12 V与24 V转19 V电源模块的输出分别为与12 V电源接口相连DC 12 V、与19 V电源接口相连DC 19 V。
24 V电源接口直接与电池相连,区分正负极。深度相机的供电电压为24 V,通过电源及信号线缆与控制电路板12的24 V电源接口Ⅰ相连。24 V电源开关控制器Ⅰ由处理器进行控制,控制24 V电源接口Ⅰ的通断。
声光报警设备的供电电压为24 V,由两芯的电源线和两芯的控制信号线,其两芯的电源线与控制电路板的24 V电源接口Ⅱ相连,两芯的控制信号线与处理器的IO控制端口相连,通过处理器发送IO控制指令控制声光报警设备的启闭。处理器的供电电压为12 V,通过两根电源线与控制电路板的12 V电源接口相连。处理器控制24 V电源开关控制器Ⅱ,即可控制24 V电源接口Ⅱ的通断。
无线路由器的供电电压为19 V,通过两根电源线与控制电路板的19 V电源接口相连。19 V电源开关控制器由处理器进行控制,控制19 V电源接口的通断。处理器为显示屏供电,供电电压为12 V。
3G/4G通信模块的供电电压为12 V,与控制电路板的12 V电源接口相连。
无线路由器提供WiFi的无线通信链路,3G/4G通信模块提供公网的无线通信链路,两种无线通信链路共同组成无线通信链路。
无线发射天线可拆卸,通过螺钉的方式与控制箱体相连,无线发射天线与路由器通过通信信号线相连。
接线端子设置在控制箱体的外侧,通过螺钉与控制箱体的箱体外壳紧固,接线端子设置有三芯电源接头和八芯的信号线接头,三芯电源接头通过三芯电源线缆与深度相机电源接头相连,并给深度相机供电;八芯信号线接头通过八芯信号线缆与深度相机信号线接头相连,用于传递深度相机的数据信号和控制信号;其中三芯电源线缆和八芯信号线缆固结在一起,组成电源及信号线缆。
3.2 软件设计
3.2.1 安全距离监测原理
安全距离监测原理如图5所示,图中25为监测区域,26为安全监测边界,27为作业人员。监测区域表示带电作业人员所在的立体区域,在带电作业过程中,带电作业人员限在此范围内工作。监测深度d表示需要监测的区域在深度方向的中心面离相机端面的距离。监测深度容差e表示设定监测区域的厚度。监测宽度w表示监测区域的宽度,带电作业人员所允许的活动宽度。监测高度h表示监测区域的高度,带电作业人员所允许的活动高度。安全监测边界表示监测区域面向相机的4条边界,当设定后,带电作业人员如果越过安全监测边界,表示作业过程出现了安全风险,监测系统通过声光报警设备进行报警,提醒带电作业人员以及带电作业班组人员要注意作业安全。
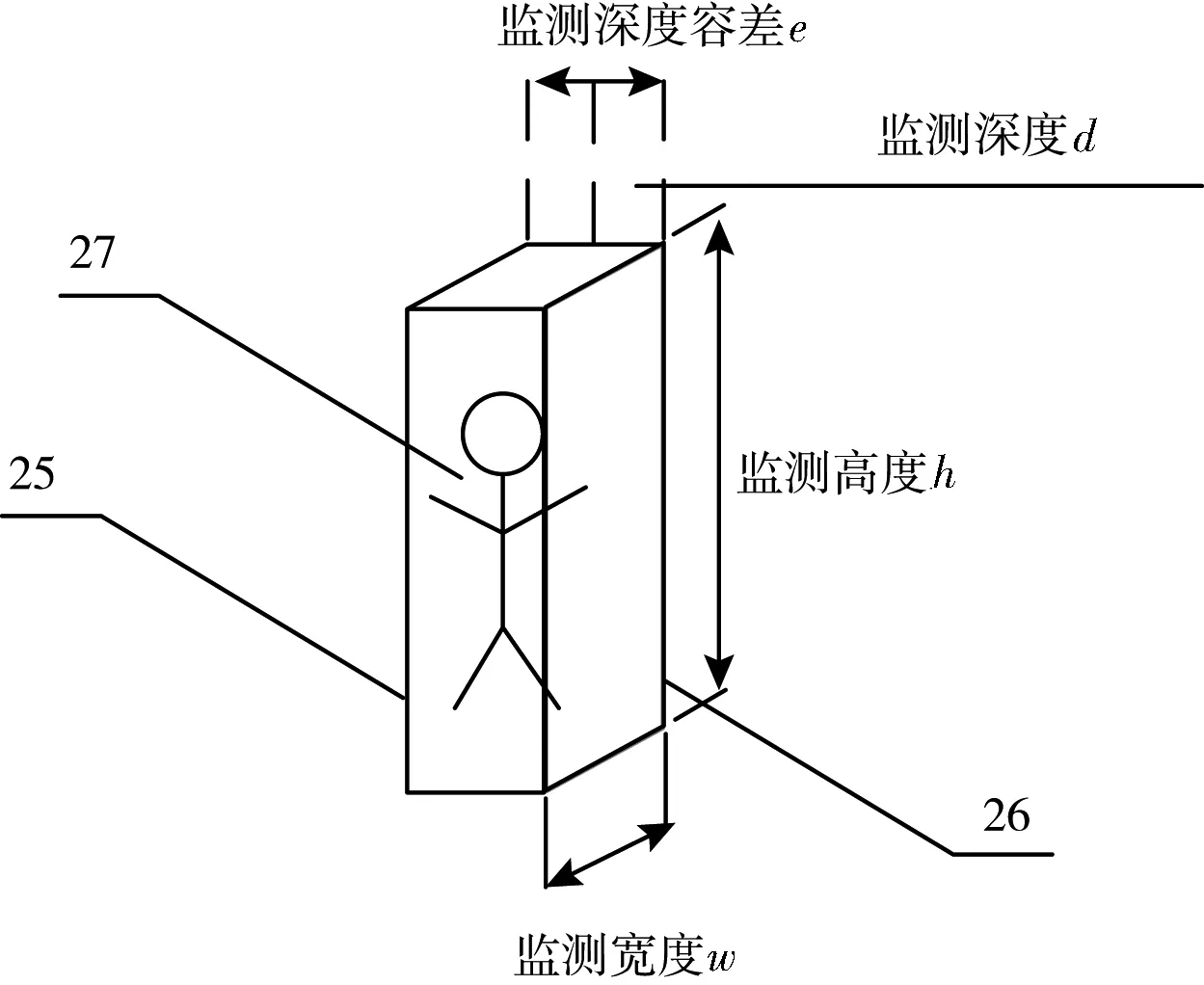
图5 安全距离监测原理
3.2.2 软件系统结构
带电作业安全距离实时监测预警系统功能结构如图6所示。该系统通过设定带电作业人员作业的安全监测区域,实现全程监控作业人员的带电作业安全距离,当作业人员越过该安全区域,系统采用声光报警的方式实现对作业人员的安全预警,防止发生安全事故。系统功能包括:安全距离监测与预警、声光报警控制、监测区域参数化设置、监测区域自动匹配、3D点云数据转2D图像、远程视频传输、视频及数据存储、系统日志、电源控制及管理、通信自恢复及管理、传感器自诊断与恢复、远程同步与交互。具体功能介绍如下:
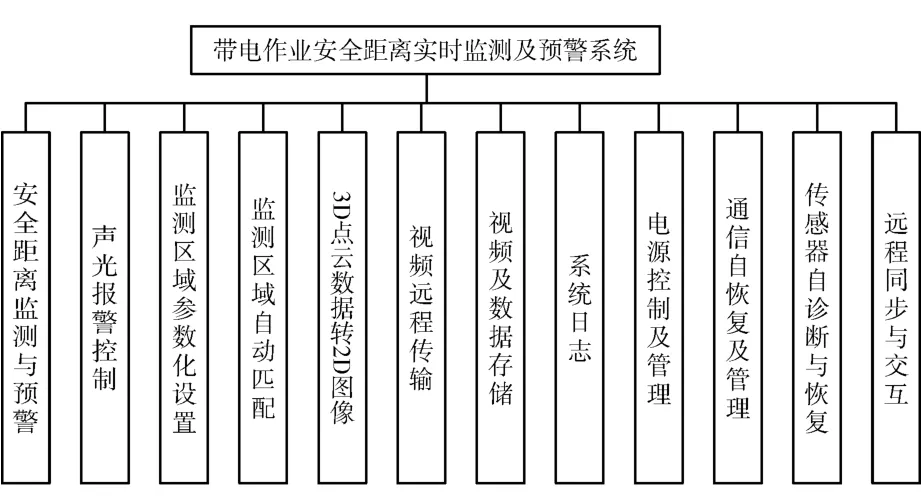
图6 带电作业安全距离实时监测预警系统功能结构
1)安全距离监测与预警功能。实现带电作业人员在作业过程中的实时安全监测,如果作业人员超出安全区域,该功能发出预警信号实现自动预警,提醒作业人员注意安全。
2)声光报警控制功能。根据预警信号对声光报警设备进行开启和关闭,当有预警信号时,控制声光报警设备开始报警,当没有预警信号时,控制声光报警设备关闭报警。
3)监测区域参数化设置功能。实现通过设定监测深度d、监测高度h、监测宽度w、监测深度容差e来设置监测区域,并可上下左右移动监测区域。
4)监测区域自动匹配功能。实现监测区域与实际带电作业场景进行匹配,当监测高度h和监测宽度w不变,监测区域在监测画面中随着监测深度d变大而变小,随着监测深度d变小而变大;当监测深度d不变,监测区域在监测画面中随监测高度h和监测宽度w变大而变大,随监测高度h和监测宽度w变小而变小。
5)3D点云数据转2D图像功能。实现将采集来自于深度相机的3D点云数据转换为2D的平面图像,便于监控终端的观测以及监测区域参数化设置。
6)远程视频传输功能。实现将2D平面图像生成视频数据,通过流媒体技术实现视频远程传输,供监控终端进行观测。
7)视频及数据存储功能。实现视频数据以及监测区域参数的自动存储,视频和数据存储在处理器的内部硬盘中。
8)系统日志功能。实现系统的日志信息的记录和存储,存储在处理器的内部硬盘中。
9)电源控制及管理功能。实现19 V电源和24 V电源的开启和关闭,开启和关闭指令由处理器发出,当系统监测到通信链路出现故障时,自动将19 V电源切断再接通,实现无线路由器的重启;当系统监测到深度相机出现故障时,自动将24 V电源切断再接通,实现深度相机的复位。
10)通信自恢复及管理功能。采用检测心跳信号来判断处理器与监控终端的通信是否正常,当处理器在2 s内检测不到心跳信号,处理器自动通过电源控制及管理功能对无线路由器进行重启并复位。
11)传感器自诊断与恢复功能。通过检测深度相机的状态来判断深度相机是否出现故障,当状态信息显示故障,处理器自动通过电源控制及管理功能对深度相机进行重启并复位。
12)远程同步与交互功能。实现监控终端对安全监测系统的可视化交互,并实现监控终端与作业现场画面实时同步。
4 试验结果
现场实验以等电位作业方式进行,作业点位于最下项绝缘子串旁,主要对防震锤进行定位与紧固,并检查绝缘子串,带电作业人员作业现场如图7所示。
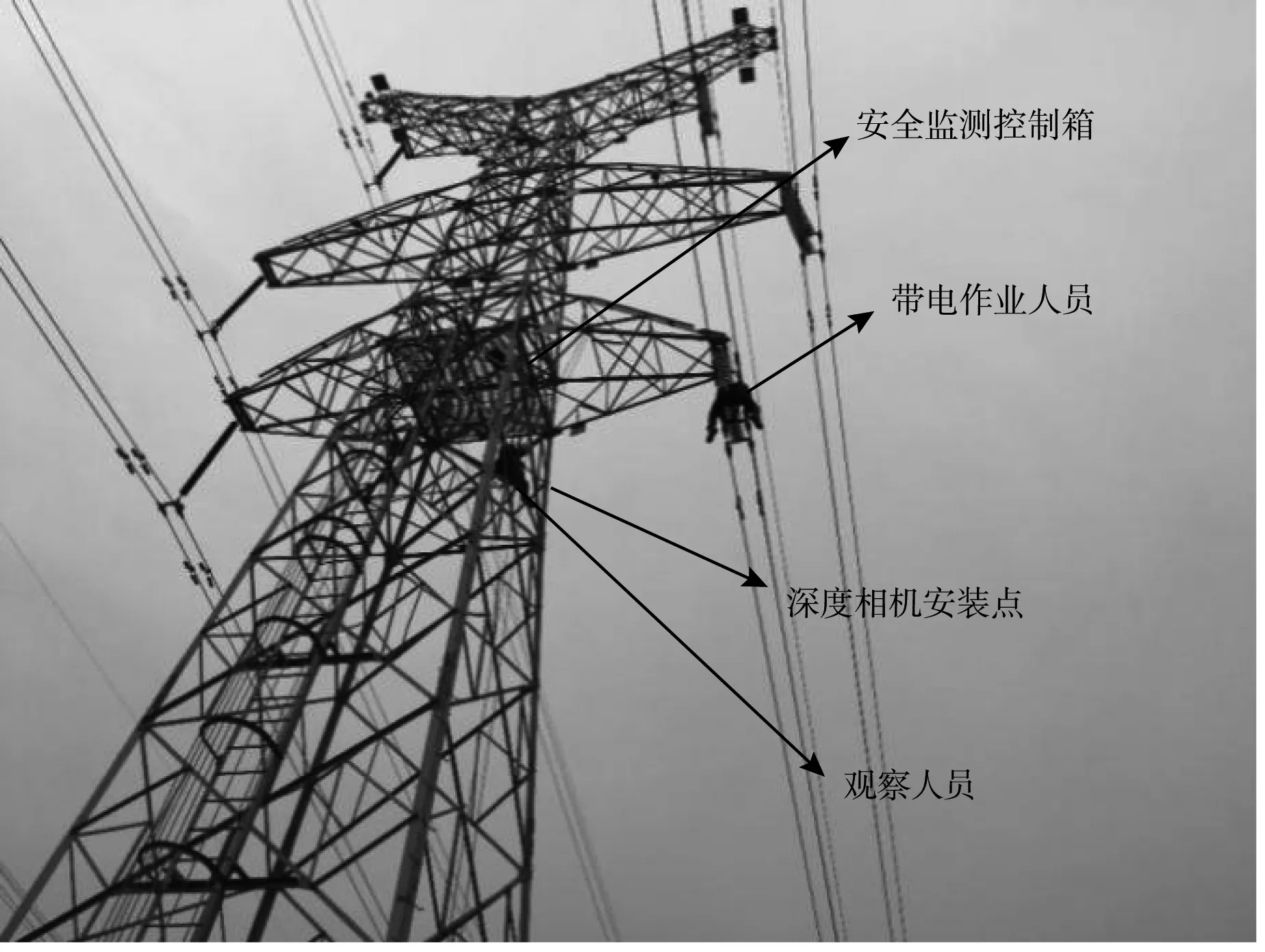
图7 等电位带电作业现场
实际带电作业远程监控画面如图8所示。图中边界为安全预警边界,由于是等电位作业,系统设置左右两侧的边界入侵和闯入不进行报警,上下边界为安全报警线,当作业人员的身体部位不超过上下边界时,系统不报警,处于正常工作状态。安全边界的顶部有绳索穿过,系统自动过滤,并不进行报警。

图8 安全监测实时画面
当带电作业人员的身体部位越过或接触安全线时,系统立刻报警。同时,安装在塔上的监测系统自动进行语音报警和警示光报警,提醒操作人员和观察人员,带电作业人员存在作业安全风险。
5 结语
1)TOF技术为主动测量,通过发送经过调制的近红外光线来测距,因而不依赖环境光线;成像速度快,实时性好,能够及时对事故做出响应;精度高,8 m范围内依然能够保持厘米级别的精度,这些特点为监测预警系统的可靠性提供了保障。
2)基于TOF监测方法可以适用于不同电位带电作业的安全监测与预警,通过自由调整监测区域的上下左右边界,适应不同电位的监测需求,比如说,等电位工作时只需要监测上下边界即可。
3)深度图像可以实时重现工作时的境况,获得工作环境范围内的三维空间坐标信息,足够的信息为功能的实现和丰富提供了可能性。
4)该监测预警系统拥有比较友好的用户操作界面,不仅有丰富的提示信息,用户还可以根据作业环境自由调整监测区域的大小和距离,而且通过无线传输以及流媒体技术,可以多客户端操作、修改数据,设置可以在多处终端自动同步,为视频监测人员的工作提供极大的方便。
