表面肌电信号人机接口技术研究
2020-04-27侯秀丽
侯秀丽
(安徽商贸职业技术学院电子信息工程系,安徽 芜湖241002)
表面肌电信号(surface Electromyosignal,sEMG)记录了肌肉自主收缩时由肌肉纤维产生的电生理活动信息。可通过表面电极拾取,因此称为表面肌电信号,它主要是浅层肌肉和神经干上电活动的综合效应[1]。由于使用表面电极采集很方便,可避免针电极采集信号时插入人体肌肉造成创伤,不会给被试带来不愉快的体验,而且进行信号采集时不需要医务人员在场,对场地没有特别要求,方便实施,因此近年来表面肌电信号得到了广泛应用,如在康复医学及竞技体育等多领域。
1 人体肌电信号产生的生理学机理
广义的肌电信号泛指人体肌肉电信号,根据解剖医学知识可知,骨骼肌作为人体三种肌肉中很重要的一种,与另外两种(平滑肌和心肌)相比,它广泛参与肌体运动,受神经冲动或抑制支配时收缩幅度更明显,是表面肌电信号研究的主要对象。因为人体肌体的各项运动一般都需要在神经系统支配下,骨骼肌各块肌肉相互配合将兴奋(收缩)作用于骨骼,进而使人体产生各种协调运动,此时肌细胞内就会出现电位高低的变化,该电位就是肌电信号。
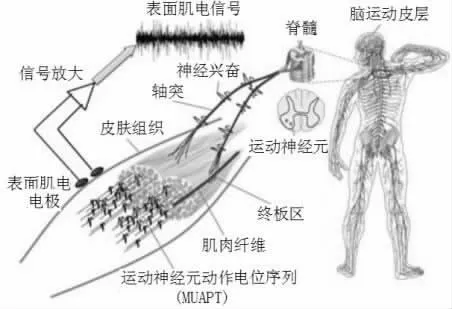
图1 肌电信号产生机理示意图
如图1 所示,在中枢神经系统控制下,人体脊髓中的运动神经元产生的电脉冲沿轴突传导到肌纤维,导致大量肌纤维收缩产生肌肉力。其实质是肌纤维的动作电位传播引起的肌肉收缩,该动作电位信号传播过程中在人体软组织中建立起电场,能够在检测电极间表现出电势的高低,各肌纤维在检测点引起电位的总和构成运动单元的动作电位(Motor Unit Action Motion,MUAP),使用市面上常见的表面电极即可收集骨骼肌动作产生的不同肌电信号。
2 表面肌电信号的特点与应用领域
2.1 表面肌电信号的非平稳性分析
由前面分析可知,肌电信号是由MUAP 产生的,MUAP 内所有肌纤维产生的肌电信号基本相似。一块肌肉兴奋越强,其参与收缩的运动单位数目越多。同一块肌肉不同位置的MUAP 对应的肌电信号传到皮肤表面所走的路径不一样,所需时间就不相同,因此,在信号采集处获得的相位和幅值就不一样。这些信号的无序叠加造成了sEMG 的非平稳性。此外,完成一个动作通常要原动肌及固定肌等多块肌肉得协同动作,不同肌肉在协同动作时都将对sEMG 产生影响,进一步加剧了肌电信号的非平稳性。
表面肌电信号作为众多肌纤维中MUAP 的叠加,能在一定程度上有效反映人体神经、肌肉功能和状态。不管是使用湿的还是干的表面电极,其采集到的sEMG 特征可概括如下:

表1 表面肌电信号主要特征
2.2 表面肌电信号应用领域
尽管表面肌电信号很微弱,且具有非常强的非平稳性,采集时与贴片电极所放的具体位置、被试者皮下脂肪厚度、体表温度的变化等因素都有关系,容易受到干扰等,但因其能较好地反映神经肌肉功能与状态,采集无创性、便捷操作等,在基础医学研究、临床诊断、康复医学等领域都得到了广泛应用。例如在临床医学中用于人体神经或者肌肉相关疾病的判断、在人机工效学领域用做肌肉工作的工效学分析,在康复医学领域的肌肉功能评价以及在竞技体育科学中的疲劳判定、运动技术合理性分析、肌纤维类型和无氧阈值的无损伤性预测等方面都有着十分重要的应用价值[2]。国内外不少学者都展开了相关研究,一般医疗机构通常使用肌电图仪采集人体肌电信号,根据肌电信号波形不同,做趋势分析,判断肌肉损伤,进行某些疾病如帕金森病的辅助诊断等。科研院所的研究学者大多使用表面电极来采集肌电信号,针对不同应用背景做相应的模式分类,探索用于不同实践。
由第一部分分析可知,在肌肉收缩前就已产生肌电信号,因此肌电信号超前于肌肉力。肌肉发力是通过肌肉收缩产生的,而肌电信号在肌肉收缩前就已经可以检测到了。所以可通过开发肌电信号检测与控制装置,在肌肉动作尚未完成时就拾取肌电信号,经过计算机高速处理用于人机接口,能够明显提高人机接口的交互速度,有助于在军事战斗或竞技体育中先发制人,如飞行员控制战斗机和敌人进行空中军事格斗,F1 赛车手控制方程式赛车在复杂路况下快速行驶)等在需要增强控制灵活性和响应快速性的场合具有巨大的应用前景。
3 表面肌电信号的采集与处理
3.1 表面肌电信号采集实验
由于肌电信号的主要特征是非平稳的随机过程,考虑到实际应用中的工频干扰情况,项目组成员合作设计了一套嵌入式的肌电信号采集仪,该系统是在笔者攻读硕士期间所在的实验室成员自行研制的肌电信号采集系统基础上,又进一步完善,经过多次调整最后完成的。在进行信号采集时,首先用酒精棉擦拭被试者前臂皮肤,固定好Ag-AgCl 贴片电极,要求被试端坐在舒适的椅子上,采取舒展的上身姿势,手臂自然放松,调整前臂状态,使其不做动作时,通过仪器面板观察不到与动作相关的活动电信号。然后按照采集实验要求,进行几次练习后,指导被试熟悉具体要求,再完成指定的几个手臂动作,每个动作完成若干次,时间间隔设置为1 秒钟,采样频率设置为1000 赫兹,通过数据采集系统记录下这些被试者进行上肢动作时的肌电信号原始数据,保存到指定位置。可以根据采集实验日期,分别建立数据目录,同时记录被试者基本信息(如年龄段、性别等),方便后续进一步分析。
需要注意的是,在被试完成不同动作时,实验操作人员要尽量保证贴片电极的位置稳定,在黏贴时就要固定好,以免电极移动或者脱落,导致采集到的数据无效情况。
3.2 表面肌电信号处理过程
通过上面的采集实验,使用银- 氯化银表面电极获得到的大量人体上臂动作的表面肌电信号通常很微弱,一般不超过5毫伏,有些甚至是微伏级的,而且里面混杂有噪声干扰。需要进行滤波,然后才能提取时频域的特征,信号处理流程如下:

图2 表面肌电信号处理
如图2 所示,首先采用高精密仪用放大器,设计多级放大电路提高信号幅值。又由于干扰源多样性,必须通过多种方式来降低噪声,详见参考文献2。只有滤除噪声干扰,才能提取信号有用特征,为此笔者设计了巴特沃斯滤波器,经过多次实验调整,可以较好地滤除干扰,又不损失太多有用的肌电信号,为后续特征提取与动作模式识别奠定了基础。
4 表面肌电信号人接接口应用
人机接口是人和机器之间进行信息交互的一种装置。由于肌肉电信号中包含了人体动作力度、位置等丰富信息,使得建立基于肌电信号的人机接口成为可能。假肢作为人机接口中的一种,对于手臂截肢患者至关重要,通过穿戴假肢能帮助其恢复一定的手部功能。最初的假肢只是装饰性的或者仅具有简单功能[3]。经过不断发展,目前出现的新型肌电控制假肢具有很多传统假肢不具备的优点,如可以量身定制、结构简单、动作自如、操作方便等,越来越获得广泛应用。
使用肌电信号控制的假肢,实物如图3 所示,该假肢有三个手指,拇指、食指和中指,用一个微型电机带动减速机构完成驱动,假手后端连接的筒壁用高性能树脂材料制作,轻薄有韧性,方便套在残臂上。手指前端可以套上乳胶手套,外表逼真,具备仿生功能。能根据残疾人神经以及上肢残臂的肌肉动作去控制假手的张开、合拢,完成相应的抓取与放开等基本动作。该肌电假手可以根据残疾患者的实际情况定制手臂的粗细、长短等,手指也可以设计,使其穿戴更加合身,工作可靠,为他们日常行动带来很多便利,显著提高其生活质量。

图3 肌电信号控制的假肢实物图
为了能够控制肌电假肢精准反映使用者意图,实现多自由度灵巧操作。还需要通过大量试验,采集更多不同被试者前臂、手腕部、甚至是手指精细动作对应的肌电信号,并且综合运用多种信号分析方法如小波分析、主成分分析等,合理提取特征参数,设计先进的分类器,通过大量学习训练,最终做出准确模式分类,用于驱动假肢精准完成不同动作,进一步提高使用者生活质量。
