基于GPS信号的目标位置姿态信息解算方法
2020-04-27熊天武黄宗卫
周 晖,熊天武,黄宗卫
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
为测试靶弹的抗干扰能力,现设计一款干扰设备,根据靶弹的航迹信息(GPS信号)实时解算为设备自身所需要的伺服指向信息(方位角、俯仰角),驱动伺服机构动作,实现干扰设备对目标靶弹的实时跟踪和干扰,验证其抗干扰能力。
1 干扰设备工作基本原理
如图1所示,A点为干扰设备所在位置,设为坐标原点,B点为目标靶弹位置,B点在以A为原点的大地坐标系上的投影为C点,B点相对于A点的方位角为A′,俯仰角为E。干扰设备根据目标位置信息(GPS信号)结合自身位置实时计算方位、俯仰角度,驱动伺服机构指向目标靶弹,实现跟踪和干扰。

图1 干扰设备工作位置示意图
2 姿态信息解算
侦察、干扰设备的位置分别为A点和B点:A点的地理位置为(LR,BR,HR),B点的地理坐标位置为(Lt,Bt,Ht)。
(1) GPS与球心坐标换算[1-2]
B点的地心坐标:
(1)
式中:Nt为B点所处地理位置的卯酉圈曲率半径;Ht为B点的高程,Ht=H+h,H为B点位置的地面海拔高度;h为B点相对地面的高度;Bt为B点所处位置的地理纬度;Lt为B点所处位置的地理经度;a为地球椭圆球体的长半轴长度,为6 378 137 m,e2为0.006 694 379 901 4,为第一偏心率的平方。
A点的地心坐标位置为:
(2)
式中:LR、BR、HR及NR为A点所处地理位置的经纬度、高程及卯酉圈曲率半径。
(2) 球心坐标系与大地直角坐标系转换
以A点为坐标原点,建立大地直角坐标系,计算B点在A点雷达大地测量坐标系内的直角坐标位置可得:
(3)
(3) 大地直角坐标与极坐标换算[3-5]
根据式(3)计算B点相对于A点的方位、俯仰角度可得:
(4)
(5)
3 MATLAB验证与DSP实现
3.1 MATLAB仿真验证
利用MATLAB工具编写m语言程序实现相应功能,并验证其正确性。设备所在位置设为参考基准点0,GPS信号取(90,30,0),分别为经度、纬度、高度,目标所在位置:GPS值(x,y,z),正北方向为0°(坐标系中纬度方向)。首先保持目标经度(90.5°)、高度(0)不变,纬度从5°到55°变化,研究方位、俯仰角度变化,结果如图2、图3所示。在纬度变为30°,方位角为90°,随着纬度从5°变化到55°,方位角从近似0°渐变到近似180°,验证正确。
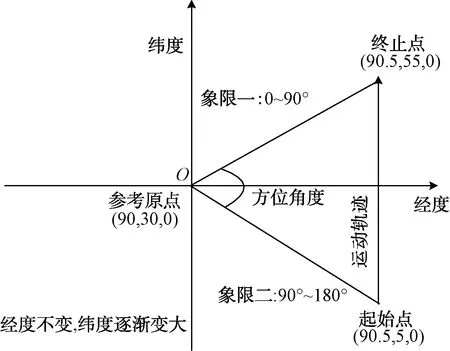
图2 经纬度与位置角度关系

图3 纬度变化引起的方位角度变化
如图4所示,保持目标纬度(35°)、高度(0)不变,经度从65°到115°变化,研究方位、俯仰角度变化,结果如图5所示。在经度变为90°时,方位角为0°,随着经度从65°到115°依次渐变,方位角从270°到360°,再变化到90°,验证正确。
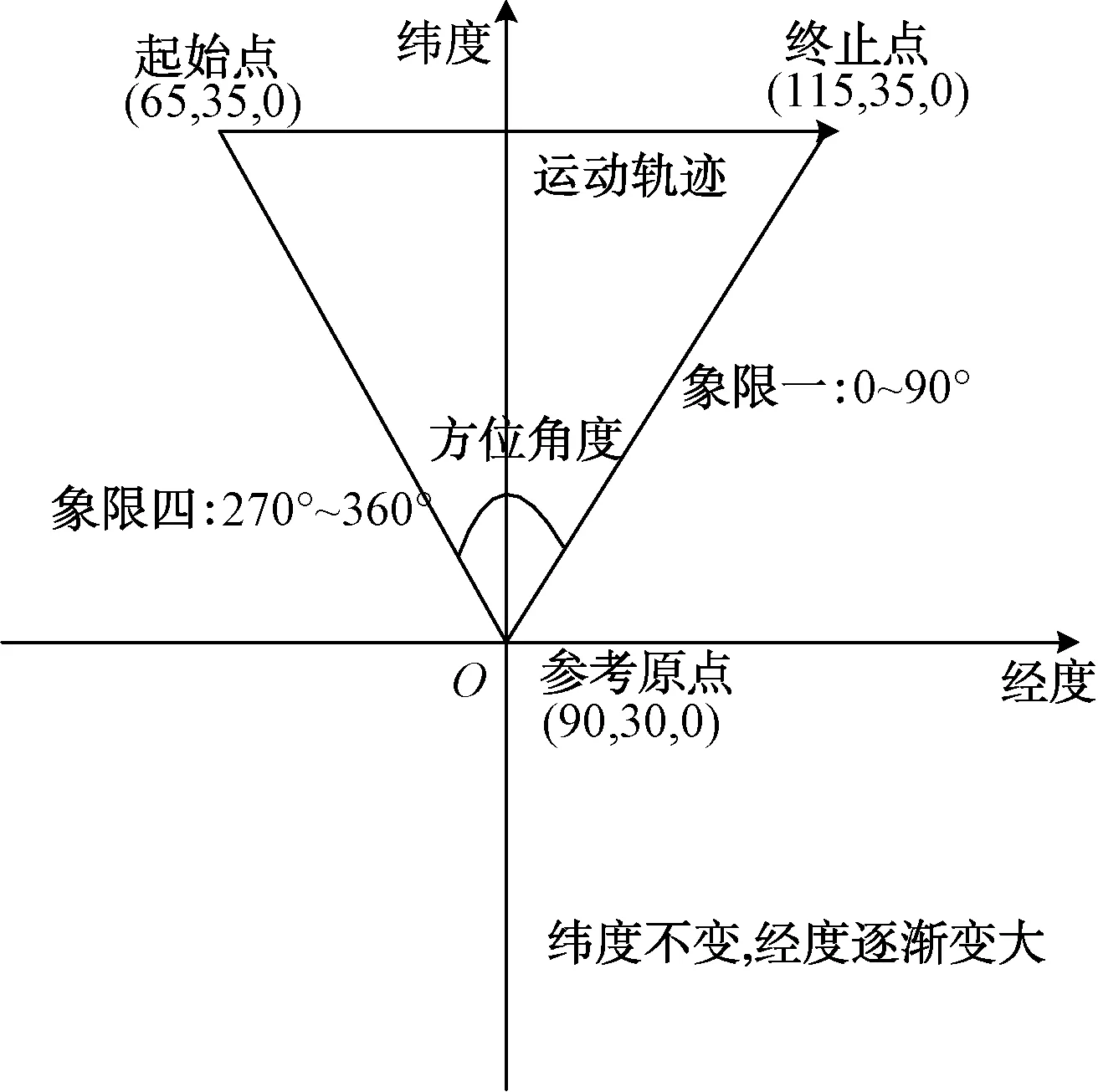
图4 经纬度与位置角度关系
3.2 试验结果及分析
目标位置为一虚拟固定点,GPS信息(121.151 389,40.625 251,7.687 423),表1为设备实时的GPS信号,表2为方位测量值、计算值及误差,表3为俯仰测量值、计算值及误差。由计算结果可知,方位误差最大为0.2,俯仰误差最大为0.63,均小于2°的设计要求,满足精度要求。方位角度及误差如图6所示,俯仰角度及误差如图7所示。
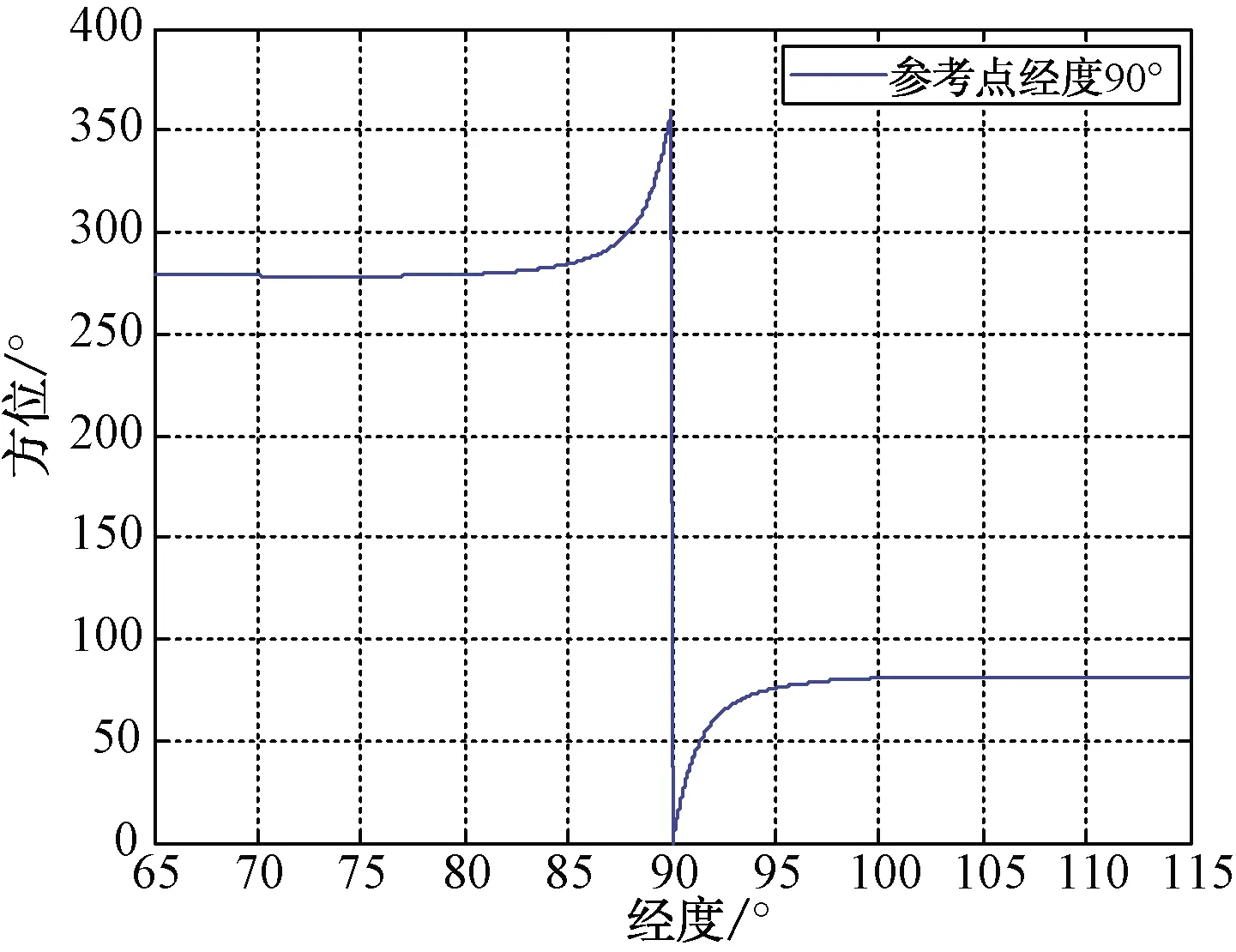
图5 经度变化引起的方位变化

表1 设备位置GPS信息

表2 静态测试数据1

表3 静态测试数据2
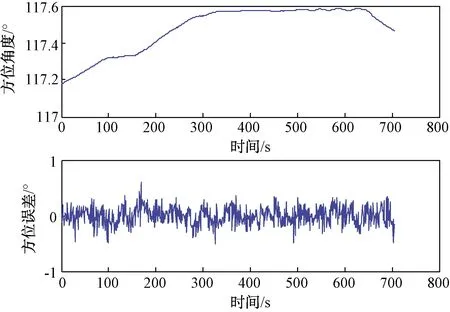
图6 方位角度及误差
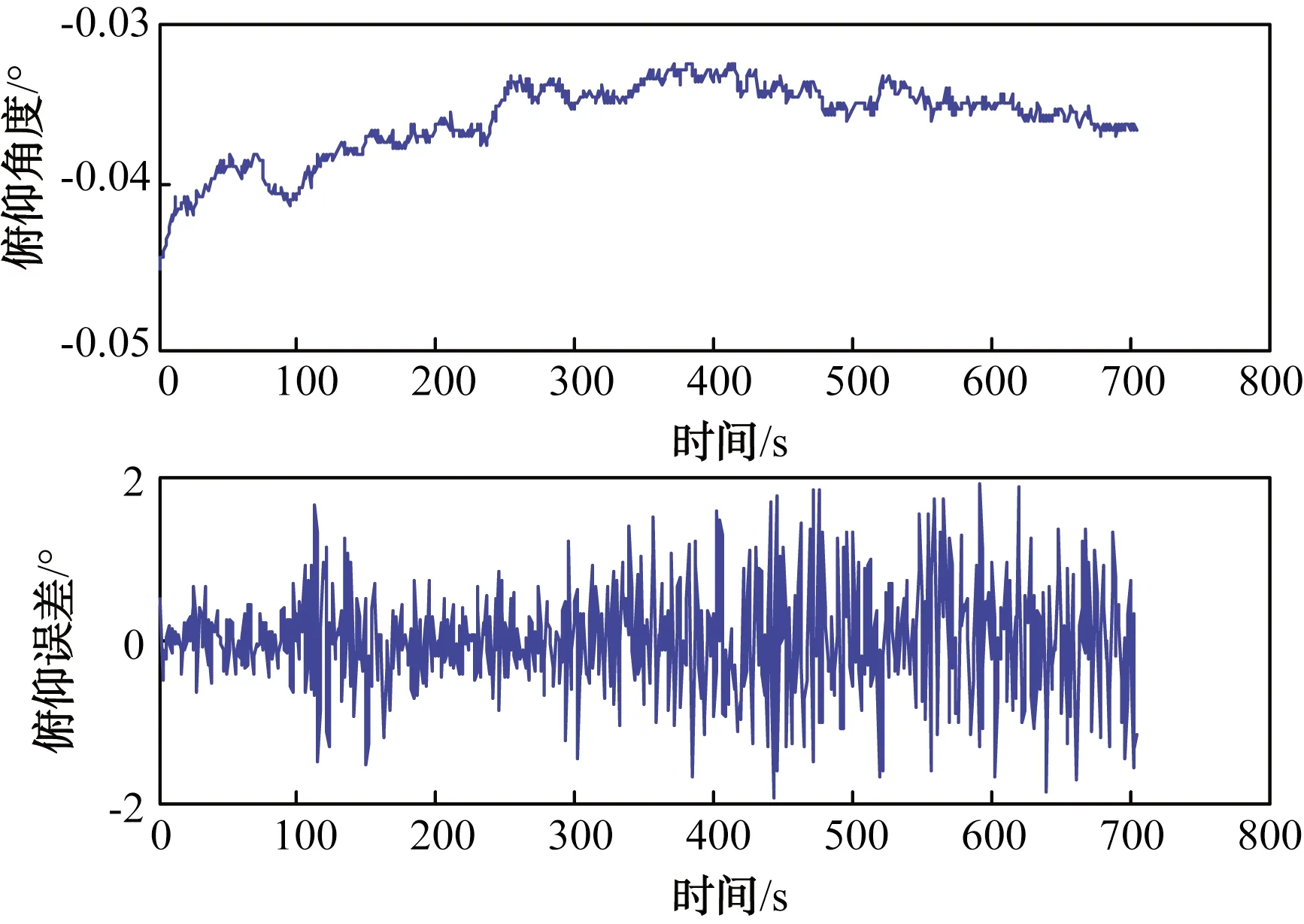
图7 俯仰角度及误差
4 结束语
该方法可以实时有效地计算当前时刻目标位置相对于干扰设备的方位、俯仰角度,根据计算结果驱动伺服机构进行动作,实现对目标的跟踪和干扰,在实际应用中只需要给出目标GPS数据,即可完成目标精确指向,应用效果良好。
