ARJ21平尾工作梯AGV改造控制系统设计
2020-04-26苏庆双孙欣璐刘铭跃
苏庆双 孙欣璐 刘铭跃


摘 要:针对中国商飞上海飞机制造有限公司ARJ21新支线飞机在制造过程中,工作梯需要人工推进调整的问题。为了降低人力,提高生产效率,对其进行了智能电气化改造。分析了AGV的基本框架,从整体化入手对AGV进行设计,从结构、硬件和软件方面对控制系统进行了详细设计。
关键词:工作梯;电气改造;AGV
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2020)11-0097-03
Abstract: Aiming at the problem of ARJ21 new regional aircraft of COMAC Shanghai Aircraft Manufacturing Co., Ltd. In the manufacturing process, the work ladder needs to be manually adjusted. In order to reduce manpower and improve production efficiency, it has undergone intelligent electrification transformation. The basic framework of AGV is analyzed, the design of AGV is started from the integration,and the control system is designed in detail from the aspects of structure, hardware and software.
Keywords: work ladder; electrification transformation; AGV
引言
AGV(Automated Guided Vehicle)是一种自动导引小车[1],随着工业技術的不断革新和发展,AGV的应用领域也越来越广。目前,上海飞机制造有限公司ARJ21新支线飞机在制造过程中,工作梯需要人工进行位置的移动调整。为了降低人力,提高生产效率,公司提出对工作梯进行电气化改造(将AGV功能引入该工装)的需求。现对其本体及控制系统开展设计,以实现自动控制和移动的功能。
1 AGV本体方案
AGV本体结构:
如图1所示,改造前的工作梯主要包括工作梯本体和万向轮两部分,将工作梯移动到指定工作位置时,只能通过人工推进。工作梯总重7.8吨,人工推进的方式费时、费力、效率低,因此对其进行智能电气化改造十分有必要。
改造后的总体布局如图2所示。工作梯采用四舵轮驱动,舵轮安装在四个顶点处,编号如图所示。舵轮驱动器、控制器、锂电池、支撑调平系统控制器及供电控制电路集中布置在电气控制柜内,控制柜固定于工作梯的底层。在每个舵轮附近装有高度可调的辅助轮,在舵轮出现故障时,工作梯仍能通过辅助轮正常移动。
为了保证工作梯运动时安全可靠,在工作梯的结合面安装安全触边和激光避障传感器。安全触边通过定制铝质基座安装到工作梯的上层、中层,激光避障传感器通过螺钉固定于工作梯上层、中层,以保证工作面积能够覆盖工作梯的工作面。
2 AGV控制系统
2.1 AGV框架
AGV主要用于确保不同工况下的工作梯能够安全迅速到达正确的工位,控制系统[2]包括运动控制系统、供电系统、安全防护系统、支撑调平系统共四个子系统。其中运动控制系统用于向伺服电机发送脉冲信号,控制电机的各种运行状态,实现工作梯全向移动[3];供电系统用于为电机、控制器、传感器和其它电元器件提供稳定的电源;安全防护系统主要用于保护AGV小车、周围设备和现场工作人员,根据需要采用了软硬件结合的方式,为工作梯的安全运行提供保障[4];支撑调平系统保证工人在工作梯上工作时,工作梯稳定可靠。
2.2 控制系统组成
控制系统硬件组成框图如图3所示。整个控制系统以DC48V锂电池为总电源,舵轮驱动器为DC48V供电,由锂电池直接供电;运动控制器、舵轮抱闸、触摸屏、各传感器及支撑调平系统为DC24V供电,由DC48V转DC24V电源模块供电。
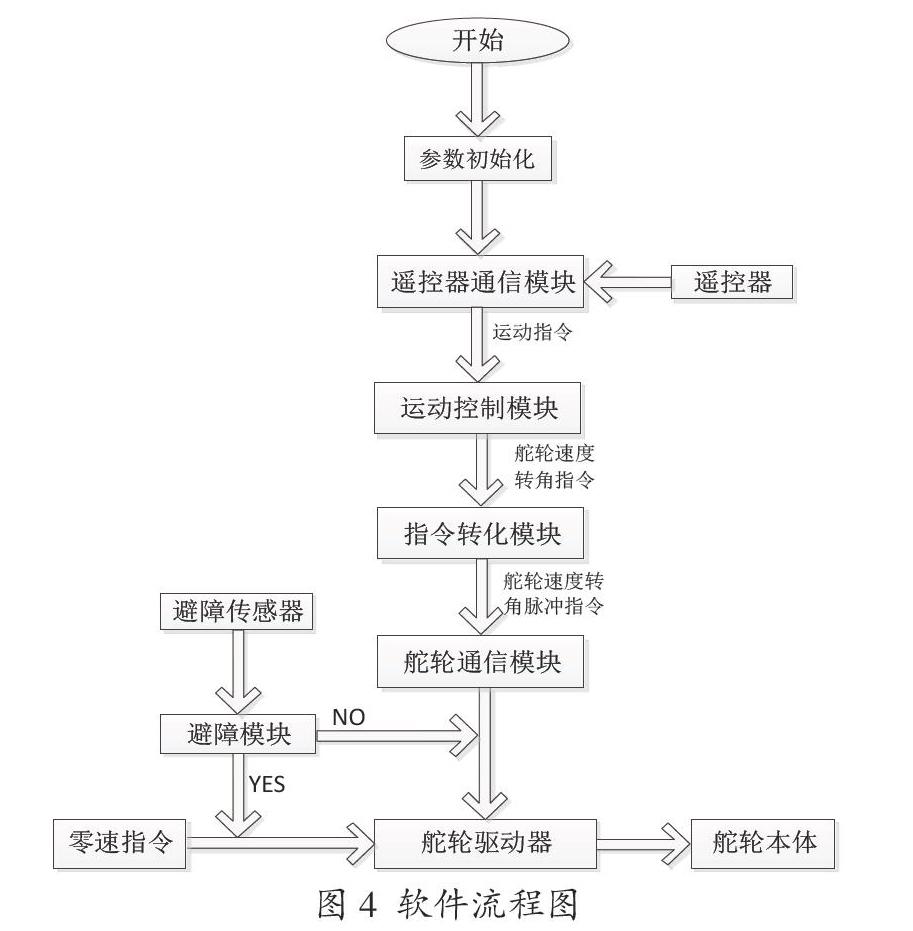
工作梯全向移动时,通过触摸屏或无线遥控器下发控制指令到运动控制器,运动控制器收到控制指令后,结合舵轮驱动器反馈的舵轮当前状态,运行运动控制算法,解算出各舵轮的转向角度及驱动速度,并将指令下发到舵轮驱动器,驱动舵轮完成相应运动。
控制电动支撑腿支撑或撤收时,通过触摸屏或无线遥控器下发相应控制指令到运动控制器,运动控制器收到控制指令后,首先判断工作梯当前状态是否满足支撑或撤收条件,在满足条件的前提下,运动控制器向支撑调平系统控制器下发指令,完成支撑腿支撑或撤收动作。
(1)人机交互
人机交互主要是通过触摸屏实现的,触摸屏安装在电气控制柜面板上,与控制器采用TCP/IP通信。触摸屏上设置控制按键,操控工作梯前后左右全向移动。触摸屏上可显示车速反馈、电池电量、故障信息等工作梯的运行信息。
为方便工人现场操控工作梯,工作梯配备无线遥控器远程操控工作梯。无线遥控器采用充电电池供电,通过无线接收器与运动控制器进行通信,采用Modbus Rtu通信协议。
(2)运动控制器
运动控制器用于运行控制算法,控制各舵轮的速度和转向角度,同时还需要采集传感器信息,运行逻辑控制算法,控制中间继电器和直流接触器开关,保证整个工作梯安全高效运行。因此,运动控制器要求拥有强大的通信能力和IO控制能力。
