基于改进马尔可夫随机场的钢轨缺陷分割
2020-04-23JonathanWU贺振东
张 辉,李 平,Q.M.Jonathan WU,贺振东
(1.长沙理工大学 电气与信息工程学院,湖南 长沙 410114;2.温莎大学 电气与计算机工程系,加拿大 温莎 N9B3P4;3.郑州轻工业学院 电气信息工程学院,河南 郑州 450002)
0 引 言
铁路钢轨缺陷伤损检测对铁路基础设施的保障维护具有重要意义。视觉检测在计算机视觉技术上取得了巨大进步,具有非接触、高效、低成本、自动化程度高等优点,在钢轨缺陷检测中应用越来越广泛[1-3]。但实际应用还是有限,主要原因由于:①光照的变化,不均匀的反射造成灰度分布不均;②对噪声敏感;③实时要求太高。
针对上述问题,国内外的很多学者提出了一些优秀的方法。如灰度阈值算法[4,5],根据阈值分割钢轨缺陷,但受钢轨光照变化、反射不均造成的灰度分布不均的影响,分割出大量钢轨表面效果较差。模糊均值算法(fuzzy C-means,FCM)能真实反应噪声干扰导致的不确定性和模糊性问题,被广泛应用于钢轨缺陷分割。近年来,一些改进聚类算法与其它算法的结合算法应用在图像分割上,如利用粒子群优化算法[6-8]、核函数的FCM聚类算法[9-12]、小波变换[13,14]等。传统的模糊均值算法忽略了图像的空间信息,分割后出现大量的残余噪声。闵永智等[15]和本课题组[16]根据钢轨表明图像沿钢轨方向灰度变化较小的特征,提出利用背景差分法结合阈值实现缺陷分割,在一定程度上解决了光照变化、不均匀的反射造成灰度分布不均对分割造成的影响,但分割后噪声干扰大。
针对光照的变化,不均匀的反射造成灰度分布不均,其它方法对噪声敏感等问题,本文提出了一种基于改进马尔可夫随机场(MRF)的钢轨表面缺陷自动分割方法。方法首先利用背景差分法对灰度进行预处理,在一定程度上克服了灰度分布不均造成的干扰;针对差分后图像利用阈值分割出现误分率高的问题,对模糊if-then规则的前提部分采用马尔可夫随机场来利用图像中的空间约束,而结果部分则指定像素距离图算法,提高了算法对噪声的鲁棒性。
1 马尔可夫随机场理论
马尔可夫随机场(Markov random field,MRF)是一种概率论,为分析图像空间约束提供了随机数学框架。我们令S=(1,2,…,N),S为N个像素点的离散集合,L=(1,2,…,C),L是像素的类别集(将N个像素点划分为C个类别)。对于每个像素点i⊂S, 我们考虑Zi的有限空间,例如Zi=(zi,zi⊂L)。 我们考虑的位置集合配置空间的状态值Z=(z1,z2,…,zc) 是由乘积空间来表示
(1)
那么如果满足以下条件,则p(z) 是一个随机场
p(z)>0,z∈Z
(2)
现在,我们将站点i的邻域表示为iasNi,i∉Ni,i∉Nj,j∉Ni∶S上的邻域系统被定义为N=(Ni,i∈S) 那么,先前考虑的随机场p(z) 是关于邻里系统的一个马尔可夫随机场,当且仅当
p(zi|zs-{i})=p(zi|zNi)
(3)
Clifford提出了Hammersley-Clifford定理;Besag建立马尔可夫随机场和吉布斯随机场的等价性。根据这个定理,吉布斯分布可以由马尔可夫等价地表示,反之亦然。因此,式(3)被重写为
p(z)=T-1exp(-U(z))
(4)
其中,T是称为分区函数的归一化常数,U(z) 是能量函数。这种能量函数是所有可能形式基团的基团势能的总和
(5)
gc(ZNi) 是S中第i个像素点的非负函数:我们有不同种类的模型,取决于方程式(5)中的基团势能马尔可夫随机场gc(ZNi) 函数。
2 基于改进MRF的钢轨缺陷分割方法
基于这些考虑,本文将模糊集理论和马尔可夫随机场相结合提出了一种用于钢轨缺陷分割的自适应模糊推理系统。在本文提出方法中,每个模糊if-then规则的前提部分采用马尔可夫随机场来利用图像中的空间约束,而结果部分则指定像素距离图。本文的模糊逻辑模型是一种无监督的方法,不需要任何训练数据。具体算法如下
Rule k: IFxiisAkandgc(ZNi) isGk
THENyiisfk(xi)
(6)
其中,Ak⊂RD,Ak∈RD,Ak是由输入变量xi(i=1,2,…,N) 模糊集定义的语言值,第k个规则的隶属函数为μAk(xi)·Gk,Gk⊂R是由输入变量gc(ZNi) 模糊集定义的语言值:将空间信息结合每个模糊if-then规则的结果后,表示像素距离图的函数fk(xi) 定义为
(7)

我们现在将所提出的方法中的每个规则的前提部分与模糊集的方法进行比较。我们看到,这两个方法都将像素xi表示为一个输入变量。然而,模糊模型忽略了相邻像素之间的相似性且忽略了图像中的空间约束是输入xi加恒定项的加权线性组合。而我们的方法中采用马尔可夫随机场着重前提部分中相邻像素之间的局部空间相互作用。
Dubois、Prade和Gan等已经提出了各种方法来克服这个问题,Gan等演示了如何将模糊系统转化为概率系统。根据这种方法,每个类由一个模糊的if-then规则表示。采用这个想法,我们将等式(6)重写为(规则数设置为等于类别数(K=C))
Rule1: IFx1isA1andg1(ZNi) isG1
THENyiisf1(xi)
Rule1: IFx2isA2andg2(ZNi) isG2
THENyiisf2(xi)
……
Rulek: IFxkisAkandgk(ZNi) isGk
THENyiisf2(xi)
(8)
在我们的方法中,对于具有隶属函数μAk(xi)=1的语言值Ak使用了清晰集:对于语言值Gk, 我们使用高斯函数为隶属函数Gk
μGk(gk(zNi))=exp(-gk(zNi))
(9)
其中,团势函数μGk(gk(zNi)) 用于合并相邻像素之间的局部空间关系,为一个非负函数,该结构模型如图1所示。

图1 k个规则(分类)的模糊模型
对于k个规则中μk(xi) 通过下式得到
μk(xi)=μAk×μGk=exp(-gk(zNi))
(10)
从等式(7)和式(9),对于每个像素xi,缩小输出值由下式给出
(11)
以及对于具有N个像素X=(x1,x2,…xN) 的图像的缩小输出Y
(12)
在等式(12)被认为是将标签分配给每个像素的目标函数。函数Y在参数下的最小化将在后面详细讨论。接下来,我们提出一种将相邻像素之间的局部空间关系合并到决策过程中的新方法。提出的方法中的基团势能马尔可夫随机场gk(ZNi) 函数为
(13)
其中,Zik=(zik,ck),i=(1,2…,N),k=(1,2…,K) 是参数。(t-1)表示上一步的迭代。Ni是像素xi的邻域。Ni是落在像素xi周围的窗口中的邻居的数量。本文中使用了 3*3 窗口。常数值α和β分别称为加权指数和模糊度。在本文中将α的值赋给2(α=2)。为了满足基团势能马尔可夫随机场gk(ZNi) 函数的非负条件;公式中的参数Zik满足以下约束
(14)
结合等式(12)和式(13),目标函数Y被重写为
(15)
(16)
在本节的下一部分中,我们提出了一种替代方法,采用梯度方法(Bezdek 1981)来调整参数Θ=(zik,ck),i=(1,2…,N),k=(1,2…,K), 并最小化目标函数Y。为了最小化目标函数,我们根据t迭代步骤中的参数ck来估计Y的推导
(17)
(18)
我们考虑在参数Zik(满足方程式(14)的条件约束)下,进行t次迭代导出目标函数Y。每个像素点使用拉格朗日乘数ζi来强制执行此约束,可得
(19)
(20)
(21)
本文所提出的方法主要的步骤总结如下:
(1)设置规则K的数量,用k-means算法去初始化参数ck和Zik, 设置ε>0为个非常小的参数;
(2)根据等式(16)估计因素;
(3)根据等式(18)更新参数ck;
3 实验分析
在本节,我们依次进行使用基于垂直投影的提取算法提取钢轨区域、对提取的图像进行背景差分处理、对原始图像进行改进MRF缺陷分割、加入不同等级噪声去破坏原始图像、再采用FCM算法、GMM算法、本文的算法在不同等级噪声下进行缺陷检测与分割、最后对3种分割方法进行分割噪声抑制对比的实验流程。具体的实验流程如图2所示。

图2 钢轨表面缺陷分割流程框架
实验设置是在Windows7 64位操作系统、Intel(R) Core(TM) i7-6700 CPU 3.40G Hz,4G内存处理器的环境下,基于MATLAB R2016b软件对算法验证和缺陷分割效果比较。
图3为钢轨表面成像平台,我们使用了分辨率为1024像素、最高行速率为68 000行/s的DalsaSpyder3行扫描相机,生成全景图像。

图3 钢轨表面成像平台
3.1 图像预处理
3.1.1 轨面区域提取
在视觉摄像机采集的原始图像中,现场采集的原始图片中存在干扰区域,干扰区域主要包括钢轨侧面部分、轨道两侧的碎石或杂草等。为减少分割工作量,减轻系统处理压力,需对轨面区域进行提取。本文提出了一种基于灰度垂直投影的提取算法,可实现从钢轨原图I(x,y) 中提取出轨面区域R(x,y)。 算法的步骤为:
(1)计算钢轨原图I(x,y) 每列灰度的平均值g(x), 计算公式为
(22)
式中:I(x,y) 是钢轨原图I在位置 (x,y) 处的灰度值,则钢轨原图I灰度在垂直方向的投影曲线可以表示为G=[g(1),g(2),…,g(W0)],H0、W0分别为钢轨原图的高度与宽度。
(2)计算投影曲线中每个轨面宽度为WR区间的积分S(b), 即
(23)
其中, 1≤b≤W0-WR。S(b) 最大值对于的坐标b即为轨面在x轴上起点,WR为轨宽,b+WR即为在x轴上终点。从钢轨原图I中提取在x轴上 [b,b+WR] 之间的图像,即为轨面区域R。
3.1.2 灰度均衡处理
从原始图像中提取出来的钢轨图像,由于光照变化、钢轨表面反射不均及列车的机械震动会造成图像灰度分布不均。主要体现为钢轨表面出现交替的明暗带,分割时难以将缺陷和背景分开,从而影响分割精度,为此,需要原始图像的灰度进行处理,实现灰度均衡处理,使得背景灰度均匀性,缺陷在钢轨表面突出,从而减弱灰度分布不均对缺陷分割带来的影响。
通过观察成像系统采集的钢轨图像发现,采集原始的钢轨图像,沿钢轨方向的图像灰度差值较小,利用这一特征可以通过背景差分法进行灰度均衡处理,主要过程为:通过计算沿钢轨方向图像灰度的均值建立背景图像,对原始钢轨图像与背景图像进行差分处理。从而差分后的图像背景灰度均匀,突出了图像中的钢轨缺陷,在一定程度克服了灰度分布不均对缺陷分割的影响,易于将缺陷从背景中分割
G(x,y)=R(x,y)-B(x,y)
(24)
式中:G(x,y) 为背景差分图像,R(x,y) 为轨面区域提取图像,B(x,y)为背景建模图像,G(x,y)为背景图像,通过计算输入图像第x行平均灰度值得到。
利用上述的钢轨预处理算法对5组灰度分布不均的原始的钢轨图像进行处理,其实验结果如图4所示。
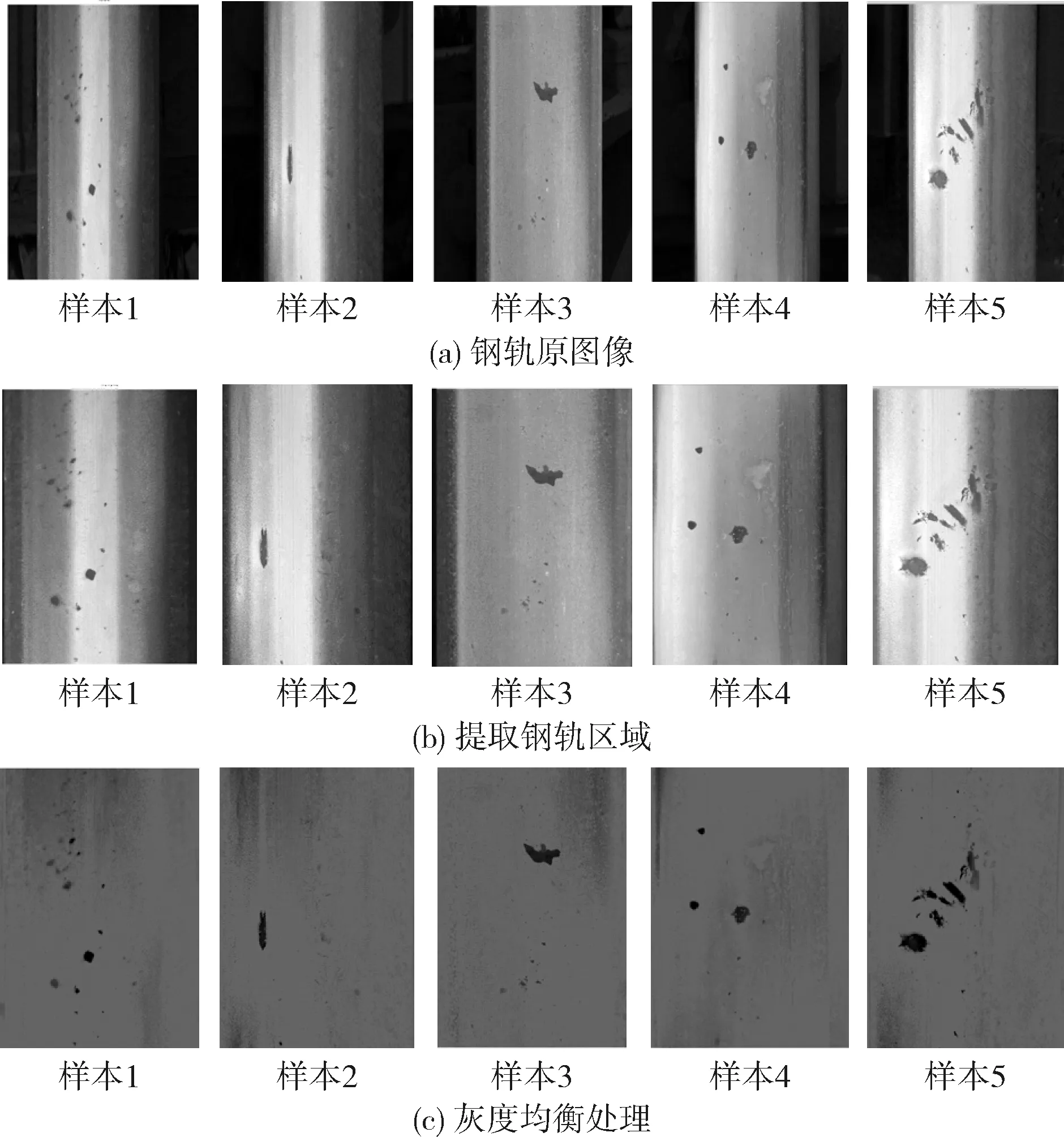
图4 缺陷分割的预处理
3.2 分割效果
3.2.1 背景差分前后对比分析
图5为样本2进行背景差分灰度处理前后,对缺陷分割的结果,如图5(a)所示,为一幅视觉摄像机采集的带钢轨缺陷原始图像,由于光照变化和反射不均,造成原始图像出现交替的明暗带,部分背景暗带灰度值甚至超过缺陷,分割难以将缺陷和背景分开。
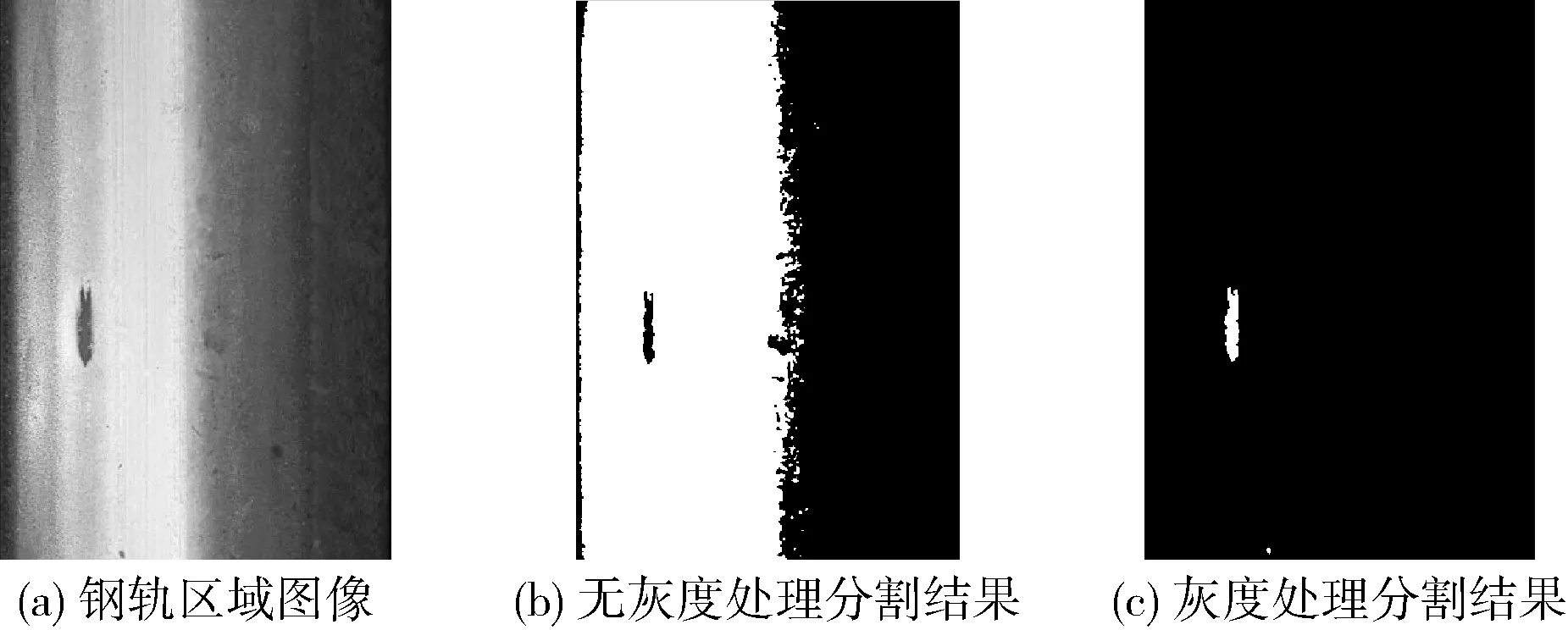
图5 背景差分对比分析
图5(b)为原始图像直接进行缺陷分割的结果,结果表明:无进行灰度处理的图像虽然可以分割出了缺陷部位,但同时也分割出了大量的钢轨表面,同时在灰度差别较大的临界区之间分割出大量噪声,误分类情况研究,分割效果差。图5(c)为对原始图像进行了背景差分处理的缺陷的分割效果,如图5(c)所示,经过处理的图像分割效果很好,能准确地分割出缺陷,未出现分割出钢轨表面情况,而且抑制噪声,误分类情况明显减少。
3.2.2 不同分割算法对比分析
为验证方法对缺陷分割有效性与优越性,分别运用标准FCM、GMM和本文方法对两幅钢轨缺陷样本进行分割比较实验。为保证对比实验的有效性,3种分割方法统一采用3.1节的提及的算法进行图像预处理。本次实验中,设置实验中的η参数为0.35,β取0.4。实验结果如图6所示。
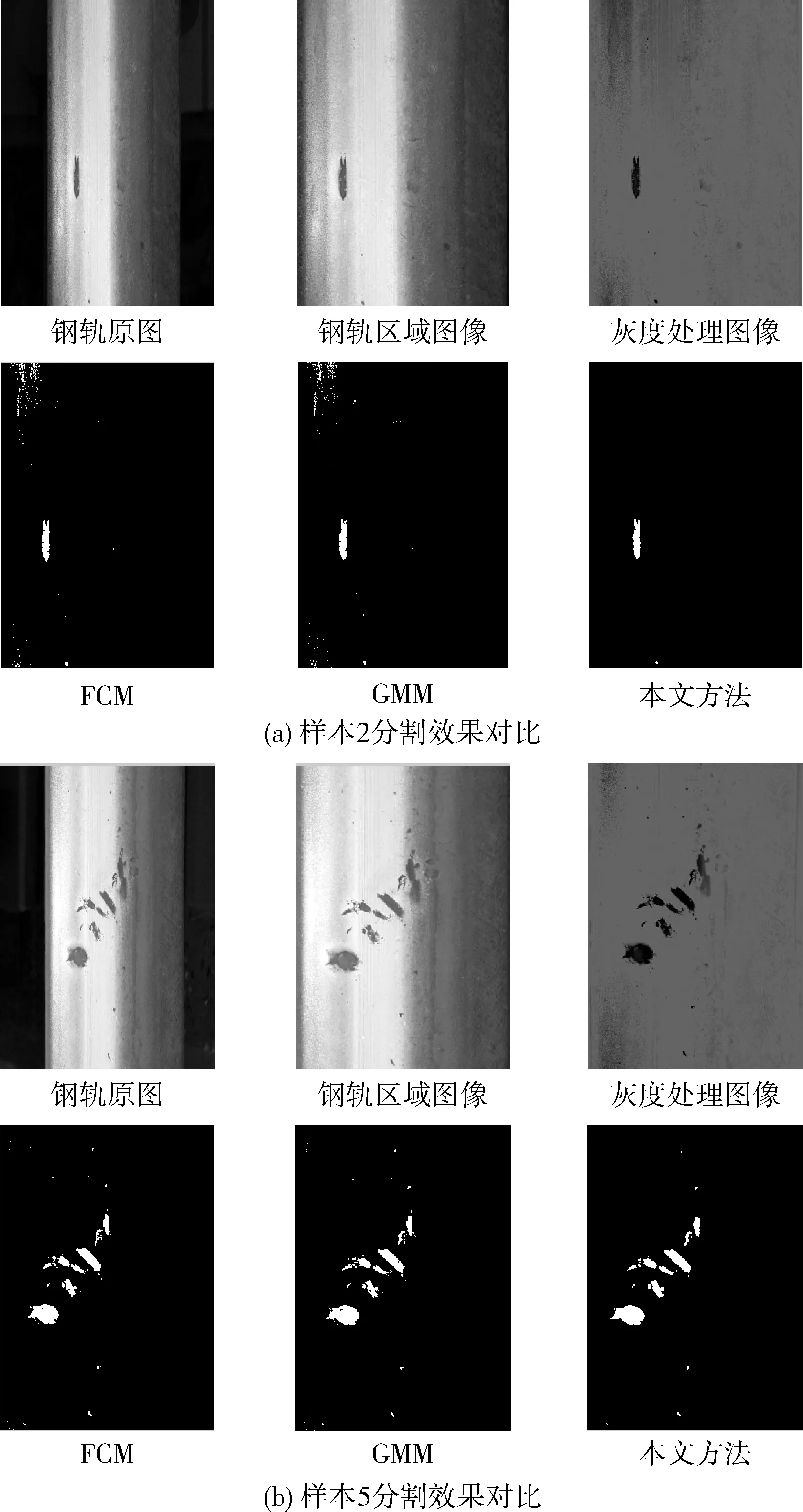
图6 不同分割算法对比分析
通过图6(a)实验我们可以发现,虽然利用背景差分可以使图像的背景灰度均匀,但在如钢轨图像列灰度差值大,会造成预处理后的图像灰度不均依然存在。如图6(a)灰度处理图像所示,经灰度处理后图像在左上方和左下方出现了分布不规则暗区,背景差分后的图像依然有一小部分灰度分布稍许不均的情况。图6(a)FCM、GMM图像为标准的FCM、GMM进行缺陷分割结果,虽然能有效分割出了缺陷,但同时在左上方和左下方分割出了非缺陷的钢轨轨面和大量的噪声,出现了较大的误分类现象,分割的效果不理想。而本文的方法分割效果很好,说明本文的方法应对灰度分布稍许不均的现象是有效的。
图6(b)的分割效果对比表明,由于原始图像存在较大噪声,标准的FCM和GMM方法虽然可以分割出了缺陷,但同时也分割出了大量的噪声点,鲁棒性差。而本文的方法分割抑制了大量的噪声点,误分类低,鲁棒性好。
3.2.3 缺陷分割性能指标
为了验证方法的有效性和优越性,本文对样本在3种方法引入性能指标定量比较分析。本文对真实采集的250幅钢轨图像进行3种方法的分割效果比较,所有图像均来自湖南省株洲中车时代集团的车辆段。缺陷形状包括了椭圆形,块状,正方形及不规则图像。引入精确率(precision rate)Pr、召回率(recall rate)Rc和准确率(accuracy rate)Ac这3个量来比较分析3种方法缺陷分割的性能

式中:TP为结果中分割正确的缺陷数量;FN为结果中漏分割缺陷数量;FP为结果中分割错误的缺陷数量;TN为结果中正确未分割缺陷缺陷数量。3种方法分割性能比较结果见表1。
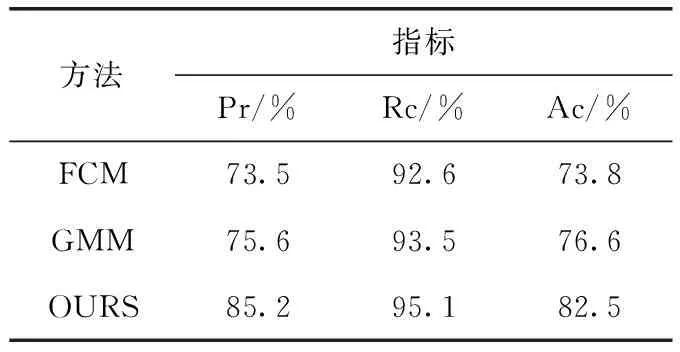
表1 3种方法分割性能对比
需要注意的是,对于缺陷分割而言,能否分割出缺陷,未分割出缺陷可能会造成事故,召回率最为重要。由表1所示,与标准的FCM和GMM相比,本文方法的3个分割性能指标都优于其它两种方法。整体样本分割的召回率、精确度分别达95.1%、85.2%,实现了很好的分割效果。造成FCM和GMM分割性能差距的原因主要为背景列灰度分别变化大,背景差分后灰度依然存在稍许不均,分割出部分轨面;同时对噪声十分敏感,分割出来大量噪声点。
3.3 噪声抑制效果
为验证所提出的方法对噪声的抑制效果,根据钢轨检测的鲁棒性、快速性、精确性的要求,用本文的方法对2组样本加入0均值的高斯噪声(噪声方差分依次0.01,0.02,0.03)进行分割实验,并将本本文方法的分割效果与标准FCM以及标准GMM方法的分割效果进行对比。检测在不同等级的噪声条件下,标准FCM和GMM以及本文的方法的噪声抑制效果效果。实验结果如图7所示。

图7 不同高斯噪声等级分割性能对比分析
由于肉眼很难定量分析噪声的抑制效果,需通过定量的指标函数来分析其抑制效果。为此,我们手动分割缺陷,通过手动分割图像与实验结果对比,标记每个分割结果的误分类像素,得到每个样本在不同等级噪声下分割误分率MCR。
通过对上述的两组样本在不同噪声下不同分割方法对比,我们发现标准FCM和GMM虽然能有效分割出缺陷,但在不同噪声下FCM、GMM分割结果都出现非常严重的误分类现象和大量的残余噪声,同时随着噪声方差的增加,加重了此类情形,对噪声十分敏感,严重影响了分割性能。相比之下,本文的方法有效识别和分割出钢轨表面缺陷,在加入0均值,0.01方差;0均值,0.02方差;0均值,0.03方差的高斯噪声情况下,分割出来的效果相差无几,对噪声具有很强的鲁棒性,同时分割准确度很高。
表2、表3分别两组钢轨原始图像在加入0均值,0.01方差;0均值,0.02方差;0均值,0.03方差的高斯噪声的误分率(MCR)
MCR=错误分类像素的数量/总像素数
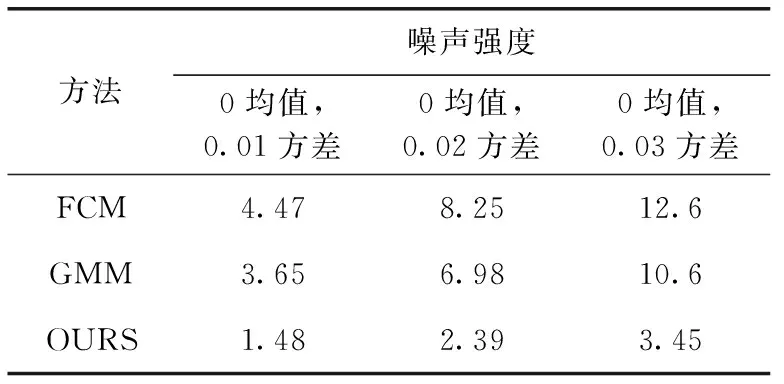
表2 样本3加入不同等级高斯噪声各算法分割的误分率/%
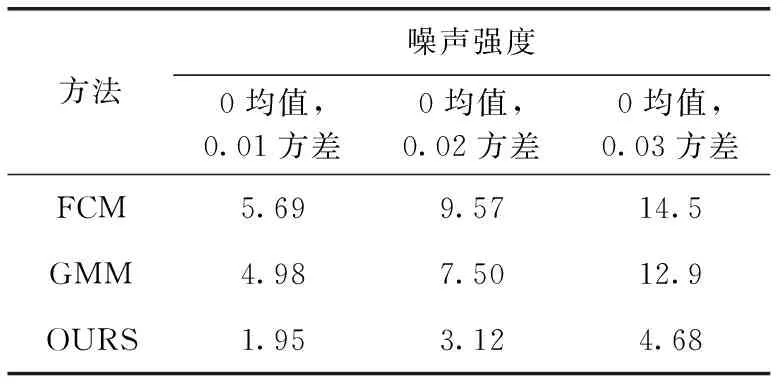
表3 样本4加入不同等级高斯噪声各算法分割的误分率/%
从表2、表3可以看出,本文方法对噪声的鲁棒性好。样本3随着噪声增加迅速增长,标准FCM和GMM的MCR由4%上升到11%,对噪声十分敏感。上述方法相比,在加入0均值,0.01方差高斯噪声后,本文的方法其误分率仅为1.48%,噪声抑制结果明显好于其它两种方法。其在视觉上可以观测到FCM和GMM方法在分割后,有很多的残余噪声。本文的方法随着噪声的方差的增加,分割性能指标优势更明显,在分别加入0.01方差、0.02方差、0.03方差后,MCR依旧相差不大,方别为1.48%、2.39%和3.45%,而准确度依旧较高。样本4的分割结果也验证了该效果,可以说明的是:本文的方法在抗噪声方面有着良好的表现,对噪声有很好的鲁棒性,相比于标准FCM和GMM分割效果更好。
为进一步说明算法的有效性和优越性,对一部分原始自然噪声较强的钢轨原图进行算法的分割,这3组图像没有进行图像的预处理,而是直接加入噪声进行分割,考验算法的实际应用效果,实验结果如图8所示。
在本节中,对原始图像加入不同等级的高斯噪声,对处理后的图像依次使用FCM、GMM和本文的方法进行缺陷检测,验证了本文方法的有效性和优越性。实验结果表明:在不同噪声水平下,虽然标准FCM、GMM能有效分割出缺陷,但分割结果不理想,在结果中出现了部分轨面及大量噪声。随着噪声水平的增大,这种情况变得越发严重。可见标准FCM、GMM对噪声敏感,在分割后有严重的误分类现象。而通过观察本文的方法发现,该方法有良好的分割效果,精度高、误分类率低,可以准确地缺陷与背景分割开来,而且有效地抑制了图像中的噪点,随着噪声水平的增长,定性分割指标依然很好。说明对噪声的鲁棒性非常好。与其它方法相比,所提出的方法对于噪声是具有准确性和鲁棒性的。不足之处为对于面积略小的钢轨缺陷尚不能分割出来,所以进一步对不同小缺陷的分割也是即将开展的工作。
4 结束语
本文提出了基于改进MRF的钢轨表面缺陷自动分割方法。方法首先针对光照不均和不均匀反射问题,利用背景差分法处理图像,在一定程度上解决了灰度分布不均难题。针对差分后图像利用阈值分割出现噪声较大现象,为了提高方法对噪声的鲁棒性,方法对模糊if-then规则的前提部分采用马尔可夫随机场来利用图像中的空间约束,而结果部分则指定像素距离图算法,通过使用马尔可夫随机场(MRF)在相邻像素图像之间并入局部空间信息,推导了一种自适应模糊推理系统实现钢轨表面缺陷自动分割。实验结果表明:本文的方法能有效分割缺陷,召回率和精确率达95.1%,85.2%。同时噪声抑制效果非常好,误分类率低,对于噪声具有鲁棒性。
