浅谈重载工作型水下机器人(ROV)海试验收方法
2020-04-23蒋喻栓陆予洋海洋石油工程股份有限公司安装事业部水下作业公司广东深圳518067
蒋喻栓 陆予洋(海洋石油工程股份有限公司安装事业部/水下作业公司,广东 深圳518067)
3000米级ROV 具备深海油田开发水下设施安装、连接、维修等作业能力,具有水下搜索、观察、数据记录和传输能力,能够携带大功率水下作业工具,完成水下采油树、水下管汇和跨接管、水下控制缆及水下连接系统等设备的水下作业支持,能够实施深海油气工程故障的应急维护和抢修作业等。
针对新购置的ROV,在完成各项陆地验收测试的基础上,结合海洋环境特点,选择合适的海域,分别对ROV、TMS 进行3000m耐压和水密性测试,以及各项性能指标,并对LARS系统安照合同要求测试,通过海上测试,检验到货设备与合同内容的一致性。
1 海试动员与作业条件
1.1 海试准备阶段
(1)编制海试工程管理及组织机构图
(2)制定ROV海试SAT任务/时间计划表
(3)制定海试进度表计划甘特图
1.2 海试位置选择
海试位置要求能见度较好,水深能够达到规定的最大测试深度(3000 米),以利于ROV 观察和操作。该地最大风速9 级,风向NNE;浪高1.2m-5.5m左右,波浪方向NNE;表面流速最大2节。
1.3 海试条件
为保证人员及设备在海试过程中的安全,海试作业需满足以下条件:
涌浪高小于2.5米;
最大风速小于25节;
最大表面流速小于2节;
天气预报可连续作业时间大于12小时。
在遇到恶劣天气船舶需要撤离时,应预留足够的时间进行当前作业设备的回收以及船舶起航。
为保证施工安全,船长和ROV监督有权利根据现场实际情况,决定是否下水测试。
2 海试方案
2.1 动员装船及陆地测试
(1)在所选船舶到港后,进行ROV 平台和定位系统设备的装船测试工作。
(2)施工前对所有人员进行作业安全培训。内容包括:体系文件相关要求、现场施工的操作规程、现场环境情况、项目施工特点、危险因素、环保要求。对进入施工现场的外来人员,在进入施工现场前对其进行相应的安全教育,并要求其穿戴合格的个人防护用品。
(3)对特殊工种持证要求:安全管理-安全监督证书、电焊作业-电焊作业证、气割作业-气焊操作证书。
(4)由第三方提供所有上船设备检验和ROV吊重测试。
2.2 ROV3000米水深功能性测试
(1)船舶航行到目标海域,进行DP 测试和USBL 定位系统调试。
(2)下水前JSA分析。在下水测试之前必须组织船方、定位人员、ROV 操作人员和厂家工程师进行下水前JSA 分析,以便大家能够充分沟通,最大程度的降低测试风险。
(3)下水前检查。对海试ROV、TMS样机进行下水前检查,下水前检查的目的是为了尽可能的消除潜器下水测试的风险。
(4)甲板测试。甲板测试分为ROV、TMS 电子系统测试和ROV、TMS液压系统测试。
(5)ROV水下摄像、照明、声纳功能测试。操作界面有无任何系统报警。
(6)ROV水下基本航行测试。
(7)ROV自动艏向、自动定深和自动定高航行功能测试。
(8)机械手功能试验。对ROV五功能及七功能机械手操作测试。
3 应急措施
ROV海试在1000米、2000米水深将ROV设置成正浮力,在3000米设置成负浮力。
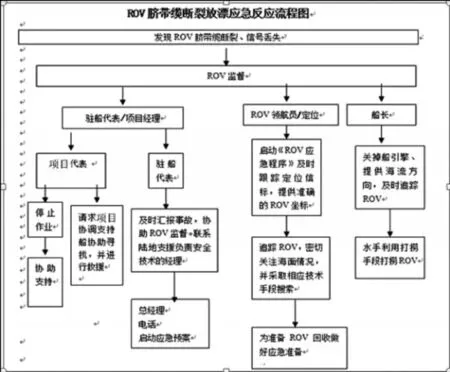
3.1 ROV放漂:
ROV 最危险的状况,整个ROV 不受控制处于自由漂泊状态。
分别制定1000 米、2000 米及3000 米水深测试放漂应变步骤。
3.2 应急回收
当ROV在水下出现严重故障无法自行正常回收时,应根据现场海试时ROV所调的浮力大小来选择应急回收方案。
(1)正浮力:海试ROV下水之前调成正浮力,失去动力无法恢复时会自动上浮至海面,期间ROV领航员操纵绞车回收铠甲缆,待ROV上浮至海面再慢慢回收至甲板。
(2)负浮力:海试ROV下水之前调成负浮力,失去动力无法恢复时会自动下沉到海床,到时再由应急ROV 下水给海试ROV挂钩,由船上吊机把潜器收回至甲板。
4 结语
通过海上实际现场测试:
(1)检验ROV各系统的关键技术指标和工作性能是否符合合同要求,同时检验ROV的海上作业可操作性和可靠性。
(2)通过ROV 海试和海上实际操作,进一步熟悉和掌握新设备的使用和维修技能。
(3)保证到货设备质量,确保设备平稳的投入运营,更多的发现设备可能隐藏的质量问题,及时向厂家提出整改意见和整改要求,避免运营后因故障延误工期的情况发生。