一种机械手控制系统的设计研究
2020-04-22周长根
周长根

摘 要:机械手广泛应用于工业生产领域,进行高危、高温、有毒等方面工作,有效提高了产品生产率和精度、节约了人力成本。本文重点进行基于PLC的机械手控制系统设计,对其应用和改进系统研究具有较大的经济价值和社会意义。
关键词:PLC;梯形图;接触器;指示灯;机械手
1 引言
本设计的主要内容是利用PLC设计一套逻辑控制系统实现机械手能够在两点之间以多种方式将一定重量的铁制构件进行搬运。针对它,应先仔细分析被控对象的工艺要求,确定合理的控制方案,而后再运用可编程序控制器进行编程。综合各方面,我所使用的是经验法和图解法的结合,即运用自己积累的些许经验知识和搜集别人的“经验”和依靠图形进行PLC程序设计的结合。
2 设计任务
2.1工作状态
(1)机械手水平方向120度范围内左右可逆运动,在垂直方向为上下可逆运动,均由直流电动机驱动。
(2)机械手抓取部分为直流电磁铁,工件由直流电磁铁直接吸上携带。
(3)机械手左右、上下运动的到位信号均由限位开关给出。
(4)工件的吸起、放下均由时间控制。
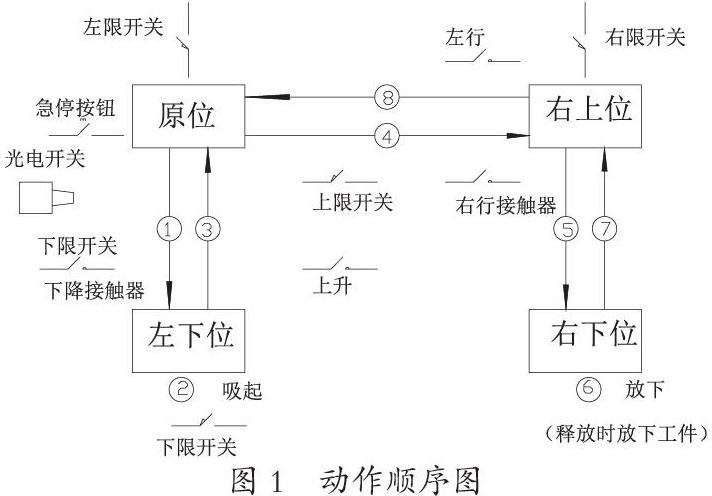
2.2 根据工艺过程分析控制要求
首先,操作人员应在专设的小型控制台上向机械手发出各种控制指令,控制台面板上设有相应的主令按钮和信号指示灯。
其次,机械手的全部动作均由直流电动机驱动,而电动机又由相应的按钮控制。其中上升/下降和左移/右移分别由两个接触器线圈控制。例如,当下降接触器通电时,机械手下降;当下降接触器断电时,机械手下降停止。只有当上升接触器通电时,机械手才上升。当上升接触器断电时,机械手上升停止。同样左移/右移分别由左行接触器和右行接触器控制。机械手的放松/吸起由一个接触器线圈(吸起接触器)控制。当该线圈得电时,机械手吸起工件;该线圈断电时,机械手放松。
机械手的动作动作顺序框图如下图。
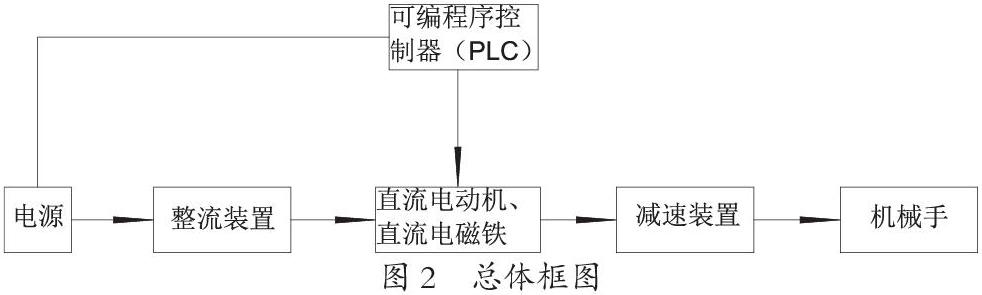
3 总体设计方案
根据电气控制目标,采用PLC为核心的电气控制方案,总体框图如下:
具体方案为:
(1)两台电机为他励式直流电动机,采用桥式二极管控制其电压,从而控制电机的转速,且都有短路、过载保护。
(2)直流电磁铁同样设在主电路里,亦有短路和过载保护。
(3)直流电动机、直流电磁铁均采用PLC控制,利用PLC的硬件与软件的结合,实现机械手以不同方式对铁制构件的搬运。
4 机械手电气设计步骤
该机械手的电气设计顺序如下:
主回路设计、控制回路设计——PLC硬件设置——梯形图软件设计
5 硬件电路设计
综上,主电路图如下:
5.1 综观整个设计,选用直流电动机的原因是:它的转矩易于控制,具有良好的起、制动性能,在相当长的时间内,一直在高性能调速领域占有绝对的统治地位。
5.2 对于整流装置,本设计采用桥式整流,这是因为它与单相半波整流电路相比,它利用了电源的整个周期,因此电源利用率高,输出的直流成分比较高,输出波形的脉动小;与单相全波整流电路相比,在整流桥中,二极管承受的电压为峰值电压,仅为全波整流电路中管子耐压的一半,故节省了购物成本。
5.3 在桥式整流电路中选择二极管,因为它与晶闸管相比价格便宜、连接线路简单。
6 PLC硬件配置
根据机械手的控制要求,列出该系统的输入/输出(I/O)分配表如下:
从表中可得出该系统输入、输出点总和为25点,并且全为数字量输入、输出,属于小型的控制系统。经计算各种机型和方案的投入费用,依经济性原则选择最优方案为日本立石公司的OMRON系列可编程序控制器,型号为:OMRON C28P,其属于整体式小型PLC,价格便宜,易于操作,结构小巧,可靠性高,另外其指令编程器选用P型机常用的PRO15-E型,它主要由键盘和显示两大部分构成。
7 梯形图软件设计
PLC硬件电路连接完毕后,控制功能的完成还要依靠软件程序的运行。机械手梯形图程序设计的主要任务是利用直流电动机的驱动实现机械手以四种方式将一定重量的铁制工件从某工作台上搬运到传送带上,并给出相应指示,据此,可以编制整体程序结构为:
本套程序主要采用了内部辅助继电器,移位寄存器及保持继电器等,以满足整套程序所需的继电器触点的要求。工作方式指示程序、单操作程序设计均为常规程序; 自动循环、单周期和步进操作程序需借助移位寄存器實现。上述四种操作组合起来就构成了机械手整个控制过程的梯形图程序。至此,梯形图程序设计完毕。
8 程序调试说明
一个比较复杂的控制系统程序的设计很难一次成功,需经过反复调试和修改才会得到满意的结果。
以机械手PLC控制程序设计可见,对于较复杂的控制系统,应先设计出整个控制系统的程序结构框图,然后分段进行设计,如机械手控制程序中的手动操作程序和自动操作程序等。每设计出一段程序,接着就进行该程序的调试,这样即使程序有问题,也便于分析和修改,待各段程序都设计、调试通过后,按整个控制程序的结构框图将各分段程序进行组合,再进行组合程序的调试。这样下来,整个程序的调试就很快了。
9 结语
本文详细进行了基于PLC的机械手控制系统设计,分析了被控对象的工艺要求,列出了清晰的设计步骤,确定了合理的控制方案,对机械手的应用和改进的系统研究具有较好的借鉴意义和较大的经济价值。
参考文献:
[1]沈治.基于S7-1200的防水卷材柔性码垛控制系统的设计[J].电气传动,2019.49(01).
[2]Michael F. Zaeh,Clemens Poernbacher. Model-driven development of PLC software for machine tools[J]. Production Engineering . 2008.
[3]王琳,肖军.基于PLC的电梯控制系统的研究与应用[J].电子设计工程,2019,27(02).
[4]倪骏程.PLC技术在电气设备自动化控制中的应用[J].电子制作,2019 (02).
(北京林业大学基建处,北京 100083)