履带起重机超起配重小车蟹形行走方法分析
2020-04-22周玉龙
周玉龙,王 静
(徐工集团工程机械股份有限公司 建设机械分公司,江苏 徐州 221004)
履带起重机为了提高其起重能力,通常配有超起配重系统。目前履带起重机超起配重系统有两种型式,一种是托盘型式,一种是超起配重小车型式。国产履带起重机常用托盘型式,国外履带起重机小车型式应用较广。
托盘式超起配重是将超起配重放置于特制的托盘上,该托盘结构简单,成本低廉,在国内外产品中应用最多。但履带起重机整机行走、回转时,超起配重托盘必须离地,因此在吊装施工前,需要对吊装工况进行详细的核算,并准确的确定超起配重使用数量。如超起配重用量太多,吊装时超起配重无法离地,整机无法实现行走、回转动作;如超起配重用量太少,会使桅杆与超起桅杆之间拉力很大或无法满足整机稳定性的要求而发生危险。在长臂工况时,往往起臂工况需要的超起配重数量较大,而实际吊载时的超起配重数量很少或根本就不需要,此时完成起臂动作后必须卸除多余的超起配重才能满足吊载作业时超起配重用量的要求。有些工程要求履带起重机在某一位置吊起目标物通过带载行走或臂架变幅的方式将目标物放置于另一位置,并多次重复以上操作,此时需要不断调整超起配重数量以满足工程应用。因此超起配重托盘型式在实际工况应用较为费时费力,效率较低。
小车式超起配重是将超起配重放置在带轮胎(不局限)的小车上,该小车可以悬浮离地实现整车回转行走动作,也可不离地实现整车回转行走动作。该型式既兼顾了超起配重托盘悬浮工作状态时的回转行走动作,也实现了非悬浮工作状态时回转行走动作,可以适应履带起重机所有超起工况吊装应用,具有广泛的实用性。但小车结构复杂,成本高。
1 超起配重小车构造与蟹形行走方案
1.1 基本构造
超起配重小车主要由行走装置、支撑装置、连接架、托盘装置、液压系统、控制系统六大部分构成(见图1)。行走装置由连接架与轮胎组成,上侧通过回转支承和配重托盘连接,整个配重小车再通过连接架与转台连接;支撑装置上设有油缸,通过油缸可以将超起配重小车支撑起,通过液压系统和电气系统之间配合实现行走装置中轮胎的不同角度调节并进行固定,进而完成超起配重小车回转、直线行走、蟹形行走等各种动作。
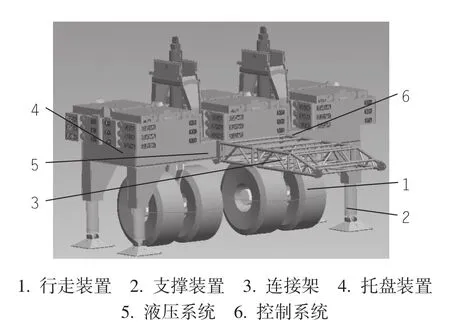
图1 超起配重小车结构
1.2 工作原理
小车式超起配重可在悬浮状态实现回转动作和行走动作,这与托盘式超起配重实现方式一样,在此不做过多阐述。
小车式超起配重在落地状态实现行走方式有两种:(1)履带起重机拖动超起配重小车行走。此时超起配重小车处于自由行走状态,即超起配重小车无动力;(2)履带起重机与超起配重小车各自驱动行走装置行走,即超起配重小车有动力。本文主要论述超起配重小车无动力行走方式的相关问题。
无动力超起配重小车在落地状态实现回转动作、直线行走动作比较简单,不再赘述。本文重点讨论超起配重小车蟹形行走方式,见图2。
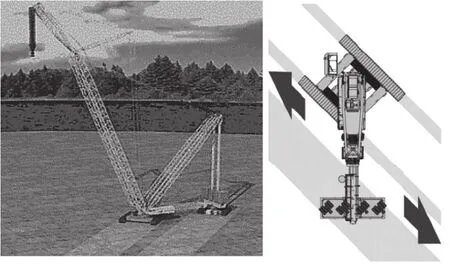
图2 超起配重小车蟹形行走方式
超起配重小车蟹形行走时,前车履带行驶方向与超起配重小车轮胎行驶方向平行。前车处于自由回转状态,超起配重小车车轮回转处于锁止状态。通过前车拖动超起配重小车行走,实现整车蟹形行走。
2 蟹形行走分析
蟹形行走不同于直线行走,蟹形行走本质上是两个铰接行走装置之间的一种运动。蟹形行走时如果前后车角度控制不当,在行走过程中无法按照预定的轨迹行走,容易出现结构件间掣肘,发生结构件破坏,甚至出现超起配重车被拉侧翻的危险。现有技术主要通过增强结构件的刚度来适应前后车的掣肘,或在行走过程中不断的人为调整超起配重车的角度及轮胎位置。该方法带来整机成本的增加,且操控实现繁琐,控制方案实现较困难。
蟹形行走分析主要通过对主机及超起配重小车蟹形行走时受力模型简化,分析行走过程中各部件受力状态,及超起配重车与主机的角度范围,得出蟹形行走时整机需要满足的条件,为超起配重小车设计及蟹形行走操作提供理论依据。
2.1 模型简化
蟹形行走本质上可简化为两个铰接行走装置,具体见图3。将超起配重小车系统中主机部分转台与车架之间通过回转支承铰接在一起,该点等效为铰接点。超起配重小车中的行走装置与配重托盘之间也等效为铰接点。两个铰接点之间通过转台和连接架刚性连接。
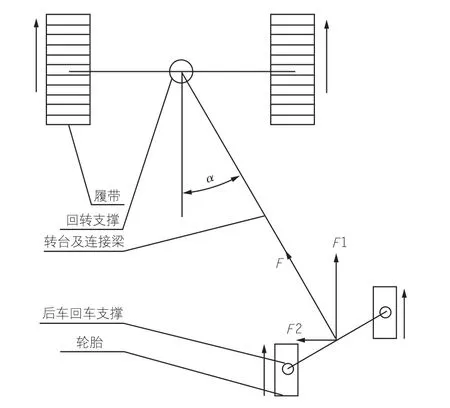
图3 超起配重小车蟹形行走受力简化图
2.2 受力分析
超起配重小车牵引分力和侧倾力之间满足如下关系


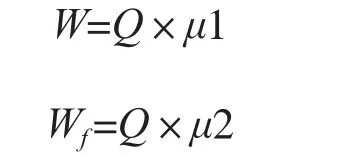
超起配重小车前进阻力和最大侧向摩擦力如下
式中 F—— 转台施加给超起配重小车的总牵引力,N;
F1—— 总牵引力在超起配重小车轮胎行走方向上的牵引分力,N;
F2—— 总牵引力在超起配重小车轮胎侧向方向上的侧向力,N;
Fp——超起配重小车坡道阻力,N;
α—— 转台相对于主机行走方向的偏角,°;
W——超起配重小车轮胎前进阻力,N;
Q——轮胎所受正压力,N;
Wf—— 超起配重小车轮胎与地面最大静摩擦力,N;
μ1—— 轮胎前进阻力系数,推荐μ1=0.015~0.02(沥青和混凝土路面);
μ2—— 轮胎与地面的静摩擦系数,推荐μ2=0.7~0.9(沥青和混凝土路面)。
2.3 蟹形行走可行性分析
蟹形行走的实现方案有多种,本文中只讨论前车拖动超起配重小车行走方案及实现该方案满足的条件。蟹形行走需满足下列条件
式中 Fzr—— 主机回转支承可承受的最大径向力,N;
Ftr—— 超起配重小车回转支承可承受的最大径向力,N;
Fr——轮胎可承受的最大侧向力,N。
蟹形行走时,牵引力F1要大于等于行走阻力W;轮胎所受侧向力要小于轮胎最大静摩擦力;总牵引力F小于主机回转支承承受的径向力Fzr;总牵引力F小于小车回转支承承受的径向力Ftr;侧向力F2小于轮胎可承受的最大侧向力。
2.4 蟹形行走操控步骤
蟹形行走操控步骤主要有4步:
(1)履带起重机工作前,调整超起配重小车与主机至指定角度。其中,回转角度[α]<min{atan(F2/F1),asin(F2/min(Fzr,Ftr))}。
(2)通过支撑装置中的油缸将超起配重小车整体支撑离地,调整超起配重小车轮胎角度至α角度,并锁死回转减速机。
(3)通过支撑装置中的油缸将超起配重小车整体降落至地面,使轮胎着地。
(4)前车开始前行,用前车带动后超起配重小车,超起配重小车被动实现蟹形行走。
3 结束语
超起配重小车系统具有自行走功能,拓展了履带起重机超起工况的应用范围和适应性,起重量与超起配重的匹配关系不必像托盘式那么严格,即使安装所有的超起配重,在起重范围内也可以不受限制地起升、变幅、行走及回转,操作简单。而蟹形行走是履带起重机吊装过程中比较常用的工况。本文对超起配重小车系统的受力进行了分析,提出了起重机无动力超起配重车蟹形行走时超起配重小车系统应满足的条件,得出了超起配重小车系统蟹形行走操作方法,为履带起重机超起配重小车系统设计及实际蟹形行走操作方法提供了借鉴。
