一种复杂环境高机动性轮式移动平台
2020-04-22李之豪骆敏舟徐孝彬谭治英
李之豪, 骆敏舟, 任 彤, 徐孝彬, 谭治英
(河海大学机电工程学院江苏省特种机器人技术重点实验室,河海大学机电工程学院,常州 213022)
移动机器人在星球探测,户外侦查,灾难搜救,以及军事等领域有着广阔的应用前景。其不仅拥有应对各种复杂地形的能力,还能够搭载多种传感器和执行器,代替人类在危险或者难以进入的区域执行多种多样的任务。移动机器人主要分为四类:轮式,腿式,履带式,以及3种相互组合的复合式移动机器人。轮式结构速度最快,越障性能差,耗能最低,腿式结构速度慢,越障性能最好,耗能最高,履带式结构速度块,越障能力中等,耗能较高。复合式结构能结合上述3种的优势,但结构和控制会趋于复杂。
为了设计一款能够适应野外非结构地形的小型高速移动机器人,候选构型为:①拥有被动悬架的轮式结构;②轮腿式结构;③轮履式结构。
被动悬架轮式结构的特点是主动轮安装在一组或多组铰接的连杆上,连杆组成的悬架可通过被动的变形适应地形,最大限度地使每个轮子都接触地面。Rocky 7[1]星球探测车采用的是经典的双摇杆悬架,拥有6个主动轮和一对转向电机,两个主摇杆和车体铰接,并通过差动齿轮组均衡车体的俯仰角。Rocky 7能翻越1.5倍车轮直径高度的障碍物。Shrimp“小虾”[2]机器人采用的是另外一种经典的被动悬架结构,6个主动轮六边形布置,前方一个引导轮,后方一个支撑轮,均配置了一个转向电机,能够原地转向,左右各一组平行四边形连杆连接两个主动轮。该结构拥有卓越的地形适应能力,甚至能翻越两倍主动轮直径高度的阶梯。CRAB II[3-5]采用了前后对称的平行四边形悬架,车体铰接在前后连杆2/3长度处,均衡了分配到6个轮的重量,该悬架的越障能力和上述双摇杆悬架近似,但该悬架由于其前后对称性略占优势。
轮腿式结构主要有三大类:①轮腿分离式;②轮腿转换式;③轮腿复合式。其特点分别是是:①相互独立的主动轮和腿式结构。②能在轮式和腿式之间切换的特殊结构。③将主动轮安装在腿式结构的关节处[16]。对于轮腿分离式结构,一般认为该结构相对于另外两种结构的优势较少,因此对该结构的研究也不多,如热那亚大学研制的Mantis[7]机器人、中国科学技术大学研制的HyTRo-I[7]机器人。轮腿转换式结构需要机构上的创新,大阪大学研制出一种四足轮腿转换式机器人[9],每条腿有三段,蜷曲起来能组合成一只轮子。首尔大学研制的Wheel Transformer[10]和天津大学研制的二轮轮腿转换式机器人[11]造型相似但原理不同。轮腿复合式是最热门的研究方向,如芬兰阿尔托大学研制的WorkPartner[12]、加拿大约克大学研制的PAW[13]、巴黎大学研制的Hylos[14],以及波士顿动力最新研制的Handle机器人。
中外对轮履式机器人的研究较少,主要原因可能是轮式和履带式结构较难互补,机器人以轮式运动时,履带结构会拖累其运动性能,造成的结果是机器人的轮式结构难以发挥其优势。韩国大邱庆北科技学院研发的一款轮履式机器人[15],能通过履带的变形包络主动轮来切换轮式和履带式运动模式。
评估上述三种候选结构的优缺点,选择被动悬架的轮式结构作为设计方向。注意到大部分该类型机器人注重纵向(平台前进方向)越障能力,没有重点考虑适应横向(垂直于平台前进方向)倾斜的地形,使得上述机器人在横向的斜坡上会出现机体倾斜的情况,而在野外非结构地形中,路面倾斜方向无规则,因此提出一种注重保持机体横向平稳的被动悬架结构,并基于该悬架设计一种轮式移动平台,对其进行力学分析、运动仿真和实验,探究该研究方向对提升在非结构地形中越障能力的价值。
1 设计目标和设计方案
1.1 设计目标
总体目标是设计一款用于野外侦查作业的小型高速移动机器人,初步设定指标见表1。

表1 移动平台设计目标
1.2 设计方案
1.2.1 驱动和能源
按照设计目标,移动平台最大速度10 km/h,按照移动平台在30°斜坡上能保持1.4 m/s的速度(最大速度的一半)来计算电机功率,对于轮式移动平台,可按式(1)进行估算:
P=(μcosα+sinα)VMg/η
(1)
式(1)中:μ为滚动摩擦系数(按泥土/轮胎摩擦系数经验值取0.1);α取倾角30°;M取15 kg;V取1.4 m/s;机械效率η取0.8;则算出驱动功率P约为151 W。当α取0°,V取3 m/s时,算出平地上的驱动功率约为55 W。
假设移动平台在非结构地形上运动的平均功率为120 W,选取一块电压36 V,容量10 Ah的锂电池作为能源,能够为移动平台提供3 h的能量。
1.2.2 越障结构设计
为适应横向地形,设计了前后两种被动悬架结构。前部越障结构为平行四边形连杆结构+十字形摆臂结构,共8个从动轮。平行四边形连杆结构和前部越障结构整装图如图1所示,通过连杆变形可适应横向高度不等的地形同时保持从动轮朝向不变。十字形摆臂用于翻越超过从动轮半径的障碍物。四连杆通过上下两根长杆中部的轴和车体相连,平行四边形连杆变形范围为±36°。
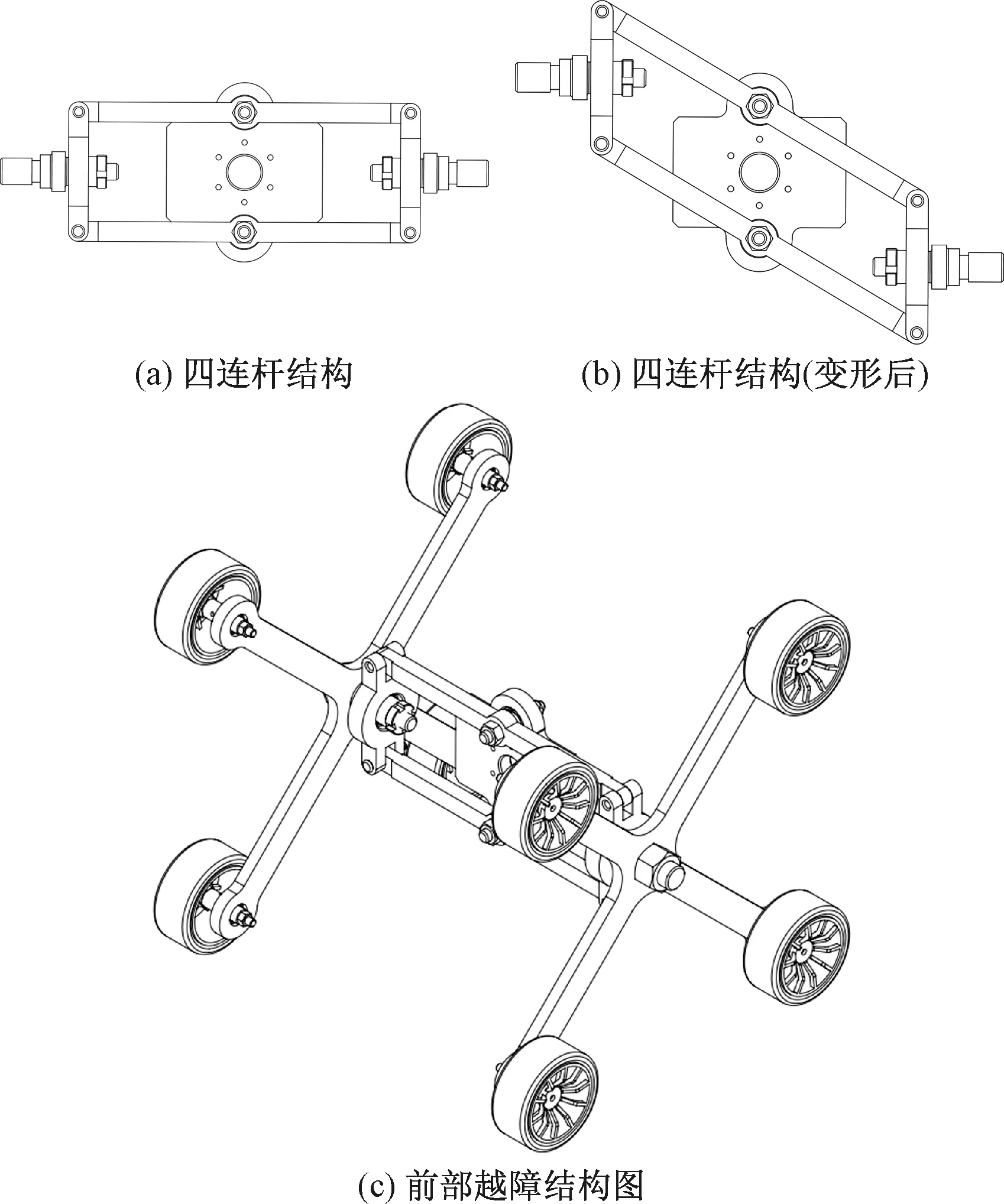
图1 前部越障结构
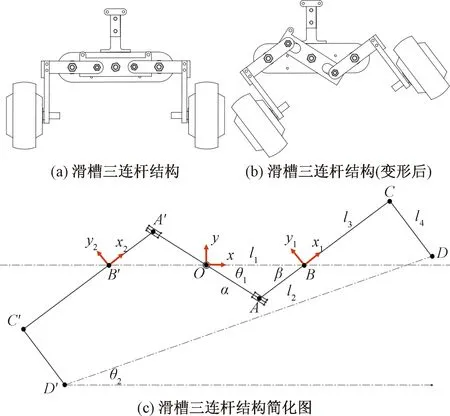
图2 后部越障结构
后部越障结构为滑槽连杆结构,见图2(a)、图2(b)。三连杆通过三根轴和机体相连,左右两根连杆各连接一根短轴,短轴末端的滚针轴承可在中间连杆的滑槽内滚动,由此实现后部结构根据横向高度被动变形。
图2(c)为滑槽三连杆结构简化图,O、B、B′为三根固定轴的简化点,A为滚针轴承可在滑槽AA′中滑动,DD′为两个主动轮与地面的接触点,则可知后摇臂结构的变形范围可用DD′与水平线的夹角θ2表示。在O、B、B′建立坐标系见如2(c)所示,设:|OA|=a,|OB|=l1,|AB|=l2,|BC|=l3,|CD|=l4,则坐标转换关系为

(2)
则D点和D′点在yOx坐标系中的坐标为
(3)
(4)
则DD′相对距离为
|DD′|y=2l3sinβ
(5)
|DD′|x=2(l1+l3cosβ)
(6)
倾角θ2可由式(7)表示:
(7)
将a∈[30,45],l1=70,l2=40,l3=77代入式(7),在MATLAB中绘制θ2和a的关系,如图3所示。
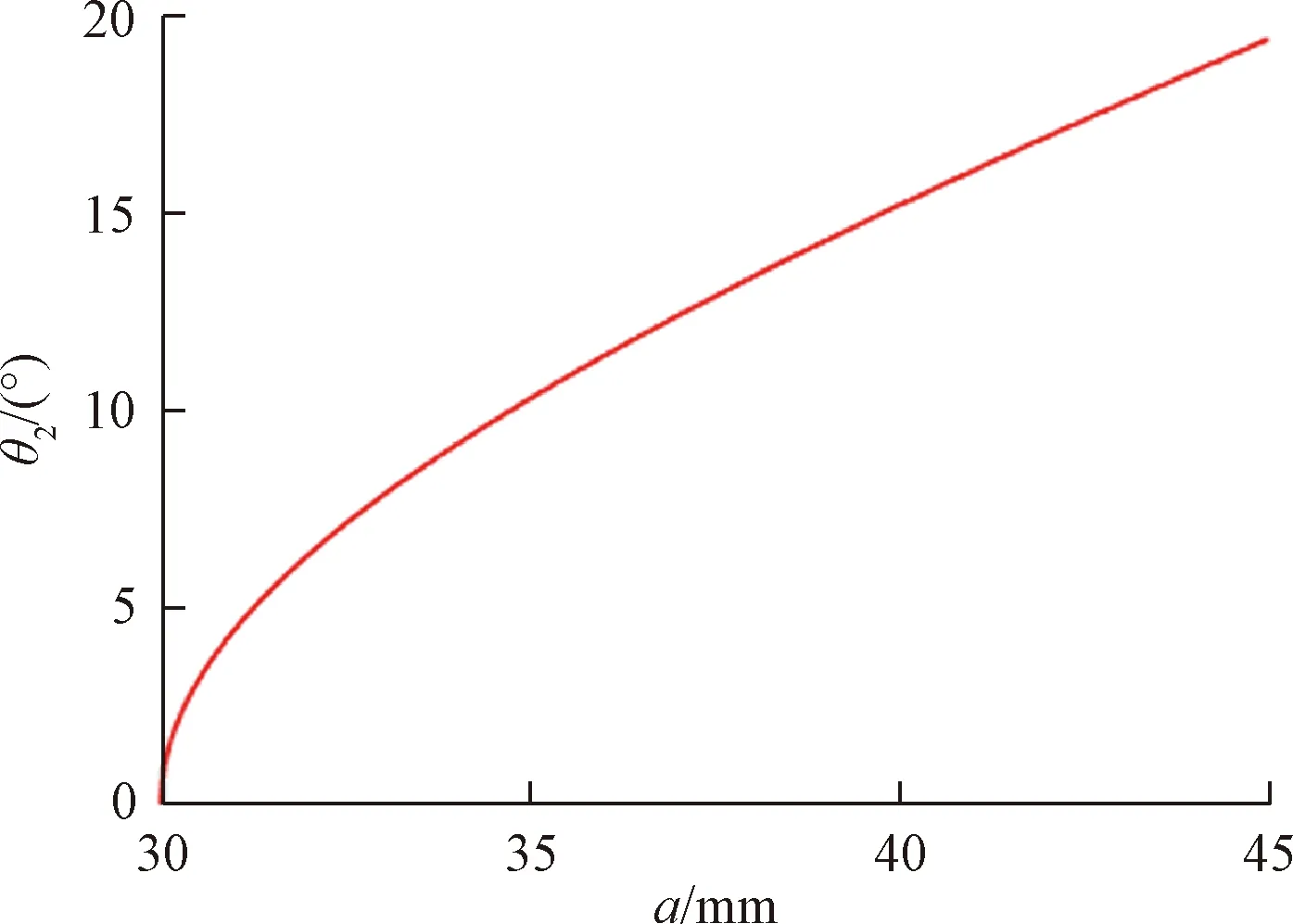
图3 θ2和a关系
因此理论上该悬架结构通过被动变形,在横向斜度小于20°的地形中可以保持车体水平。此时两主动轮之间的高度差约为90 mm。
1.2.3 整体结构设计
移动平台整体结构图4所示,前部为8个从动轮,连接在一对十字形摆臂末端,一对十字形摆臂由一组平行四边形连杆连接,后部为一对轮毂电机,由一组带滑槽的三连杆连接,为移动平台提供牵引力。机体后部有减震器,并采用差速转向。
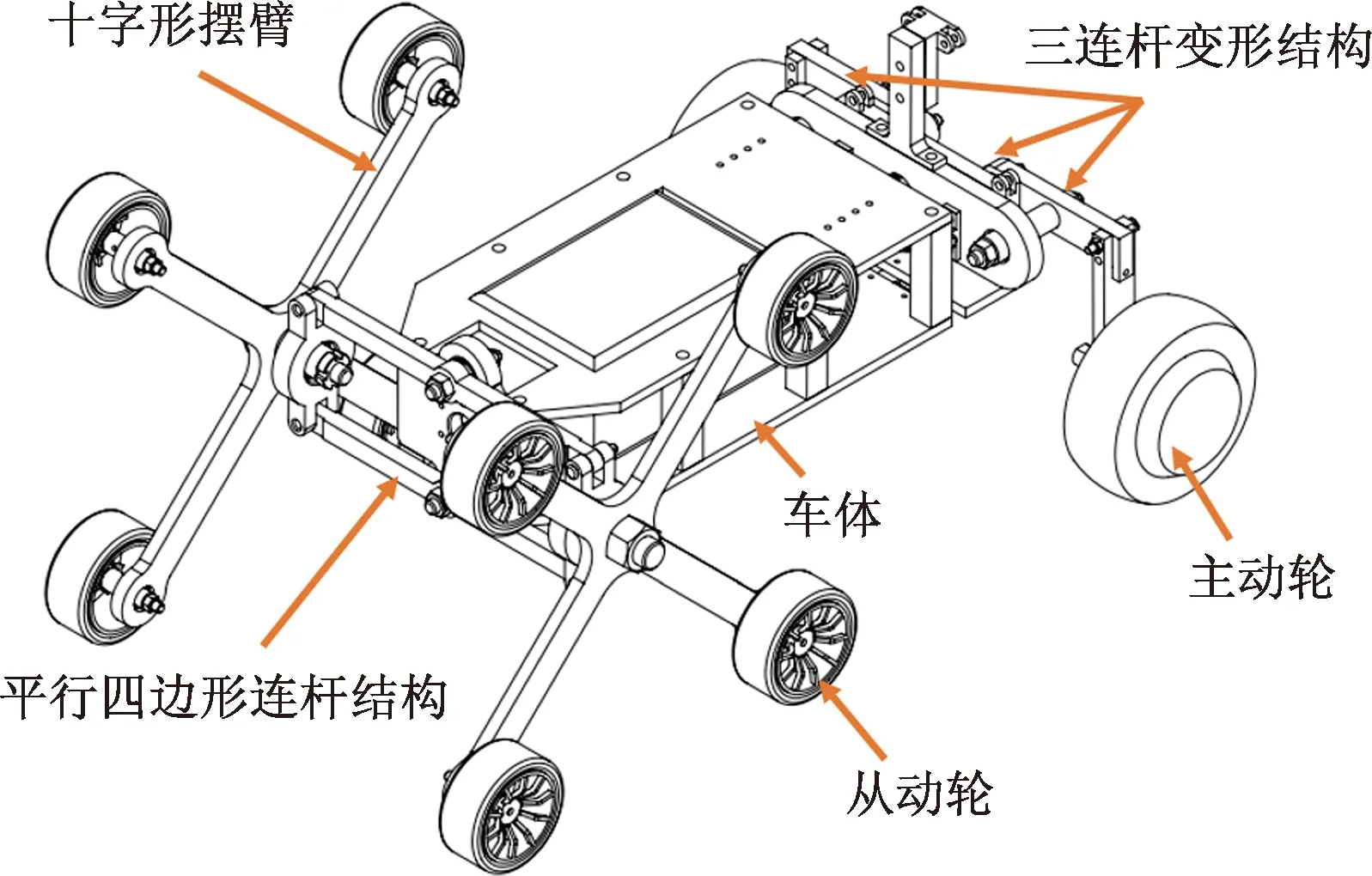
图4 移动平台整体结构
1.3 弹簧设计
移动平台设置有两组弹簧,第一组为减震弹簧,用于运动过程中的整体减震,第二组为拉簧,用于后部三连杆结构变形后的回复动作。
1.3.1 减震弹簧计算


图5 机体侧视图
Fb=2KΔls
(8)
式(8)中:K为弹簧刚度;Δls为弹簧压缩量。
代入已知量得KΔls=9.55 N,若取预压缩量Δls=5 mm,则K=1.91 N/mm。
1.3.2 拉簧计算
拉簧变形简化图如图6所示。图6中的A、B两点为拉簧安装位置,C点为固定轴的位置,H1、H2为拉簧原状态下和变形后的长度。由于拉簧无法压缩,但需要在原状态下能够缩短和伸长,故在原状态时,拉簧已有预拉伸,变形后,其拉力减少,可近似认为在变形方向多了一个压力。拉簧原始长度不超过AB的最小距离。依据几何和力学关系列出下式:
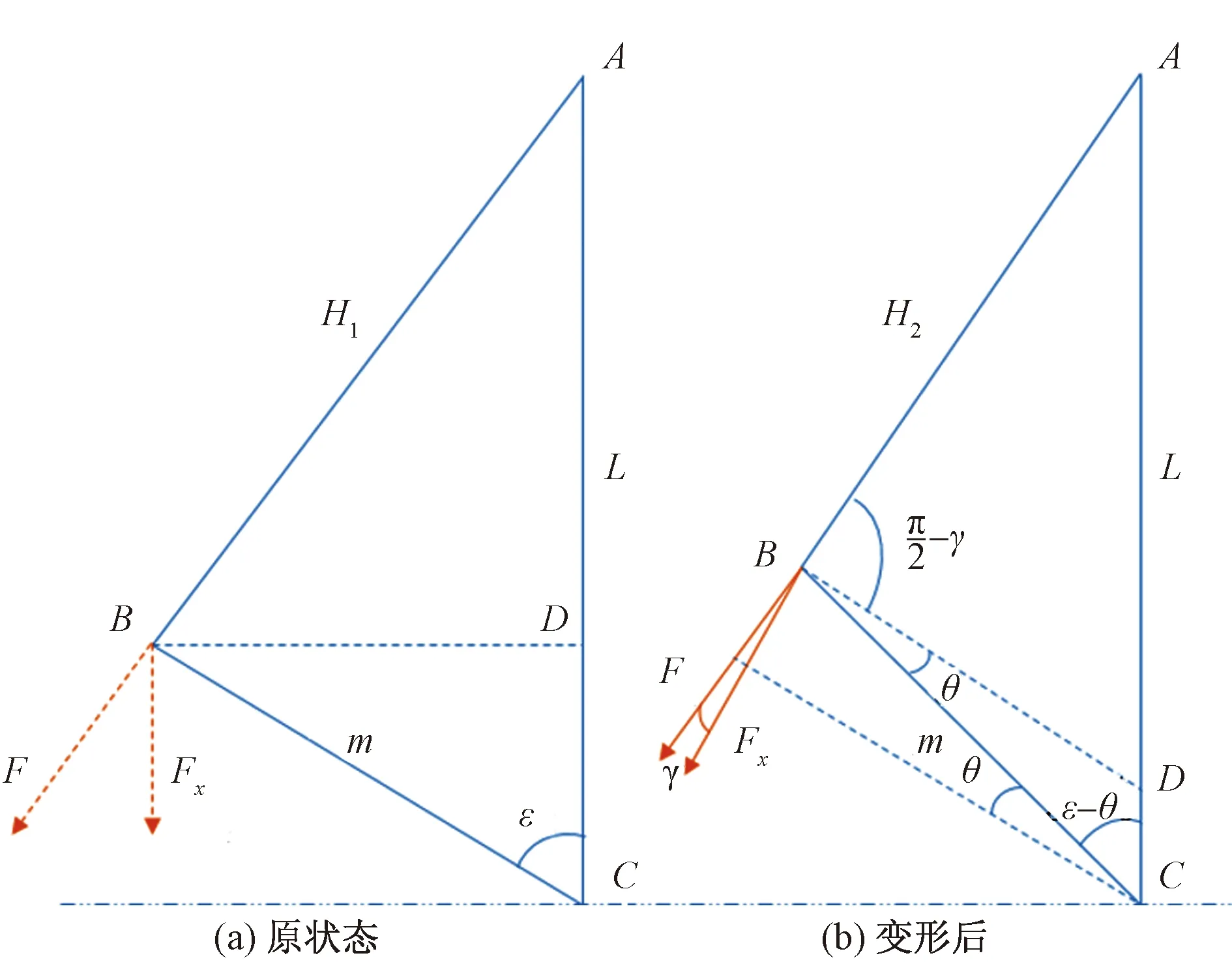
图6 拉簧变形简化图

(9)
(10)
F=K(H1-H2)
(11)
Fx=Fcosγ
(12)
(13)
式中:长度m、L和初始角度ε已知;θ为BC连杆的旋转角度;F为BC连杆作用在B点的拉力;Fx为F的分量;方向垂直于BD;γ为二力夹角。
联立式(9)~式(13)可得Fx和θ、K的关系。
图7为拉簧结构和三连杆变形结构组合简图,F1和F2为两个拉簧的拉力。为使拉簧能够在后摆臂结构变形后使其回复,下面计算所需最小弹簧刚度。拉簧的拉力产生的扭矩需要克服:①重心偏移产生的扭矩;②轮间距Lh改变需要克服的摩擦力f。则弹簧刚度K需满足
|OG|Mgsinα+μ,Mg<
2K(H1-H2)cosγmcosθ
(14)
联立式(9)~式(14)并代入已知量,计算得:K>0.315 N/mm。
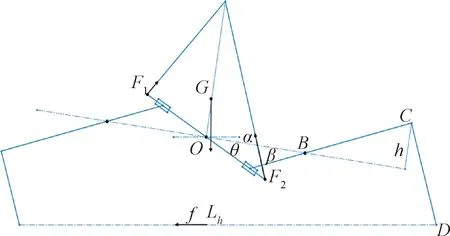
图7 后部越障结构与拉簧组合简图
2 运动学仿真
将障碍物模型和移动平台模型导入ADAMS软件中进行越障仿真。障碍物为倾斜角度为20°的横向斜坡,在不同的拉簧刚度下,绘制移动平台经过斜坡时的横向倾角曲线图,结果如图8所示。
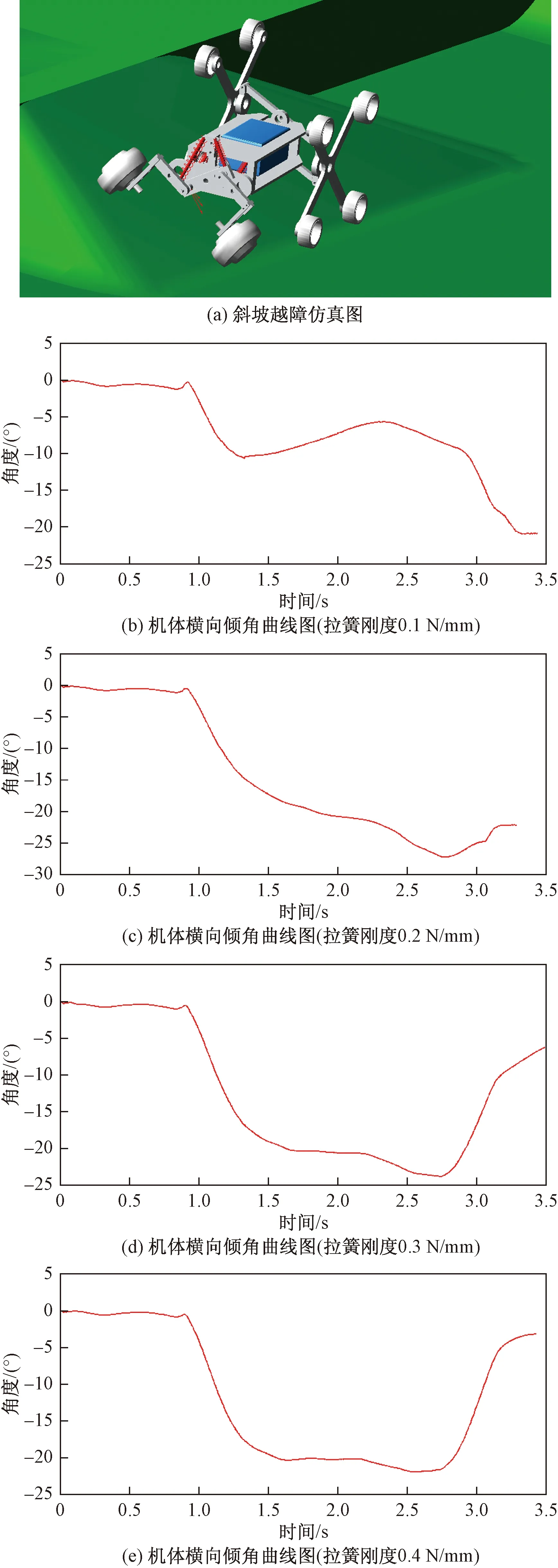
图8 ADAMS仿真结果
在图8的倾角曲线图中,0~0.9 s为第一阶段,该阶段中,平台前部越障结构爬上斜坡而后轮未遭遇斜坡,此时前部结构通过被动变形,能够很好地适应斜坡,对平台倾角几乎没有影响。0.9~1.3 s为第二阶段,该阶段中,后轮开始爬上斜坡,同时对平台倾角产生影响,根据拉簧的刚度差异,对倾角的影响效果也不同。1.3~2.2 s为第三阶段,该阶段中所有轮子处于斜坡上。2.2~2.7 s为第四阶段,该阶段中前部结构开始离开斜坡进入平地,此时平台倾角也没有大的变化。2.7~3.5 s为第五阶段,该阶段中后轮开始离开斜坡进入平地。
因此,移动平台前部越障结构地形适应能力强,同时对机体横向倾角影响小,后部越障结构的地形适应能力与拉簧刚度有关,在拉簧刚度较低时(小于0.1 N/mm),后部越障结构能够随着斜坡而产生较大变形,减少机体倾角,但在通过斜坡进入平坦的地面时,后部变形无法回复,造成了图8(b)右部倾角反而变大的结果。在扭簧刚度较高时(大于0.3 N/mm),随着移动平台的前进,后部结构先产生变形,然后机体在拉簧的反作用力下,车体倾角逐渐逼近斜坡倾角,并在通过斜坡后快速回复至水平。
3 整机搭建和实验
硬件系统框图见图9,一个变压器将锂电池提供的36 V电压转化成24 V电压,并通过分线器分为三路,两路为驱动器提供能量,另一路进入另一个变压器转化成5 V电压,为数位讯号处理篇(digital signal processor,DSP)提供能量。DSP向驱动器输出脉冲调制(pulse width modulation,PWM)波控制电机转速,同时接收驱动器反馈的电机信息。
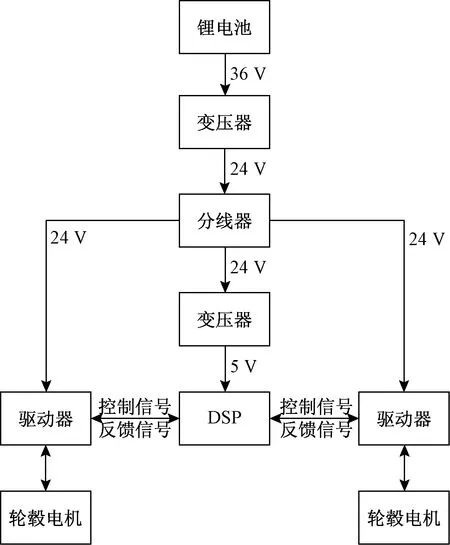
图9 硬件系统框图
移动平台实际整装图如图10所示,整机尺寸长×宽×高为553 mm×312 mm×273 mm,车体尺寸为 280 mm×148 mm×72 mm。车体下层安装了一块36 V 10 Ah锂电池,一块36 V转24 V变压器和一个分线器。车体上层安装了两个中菱轮毂电机驱动器,一块24 V转5 V变压器和一块DSP(TMS320F2812)。
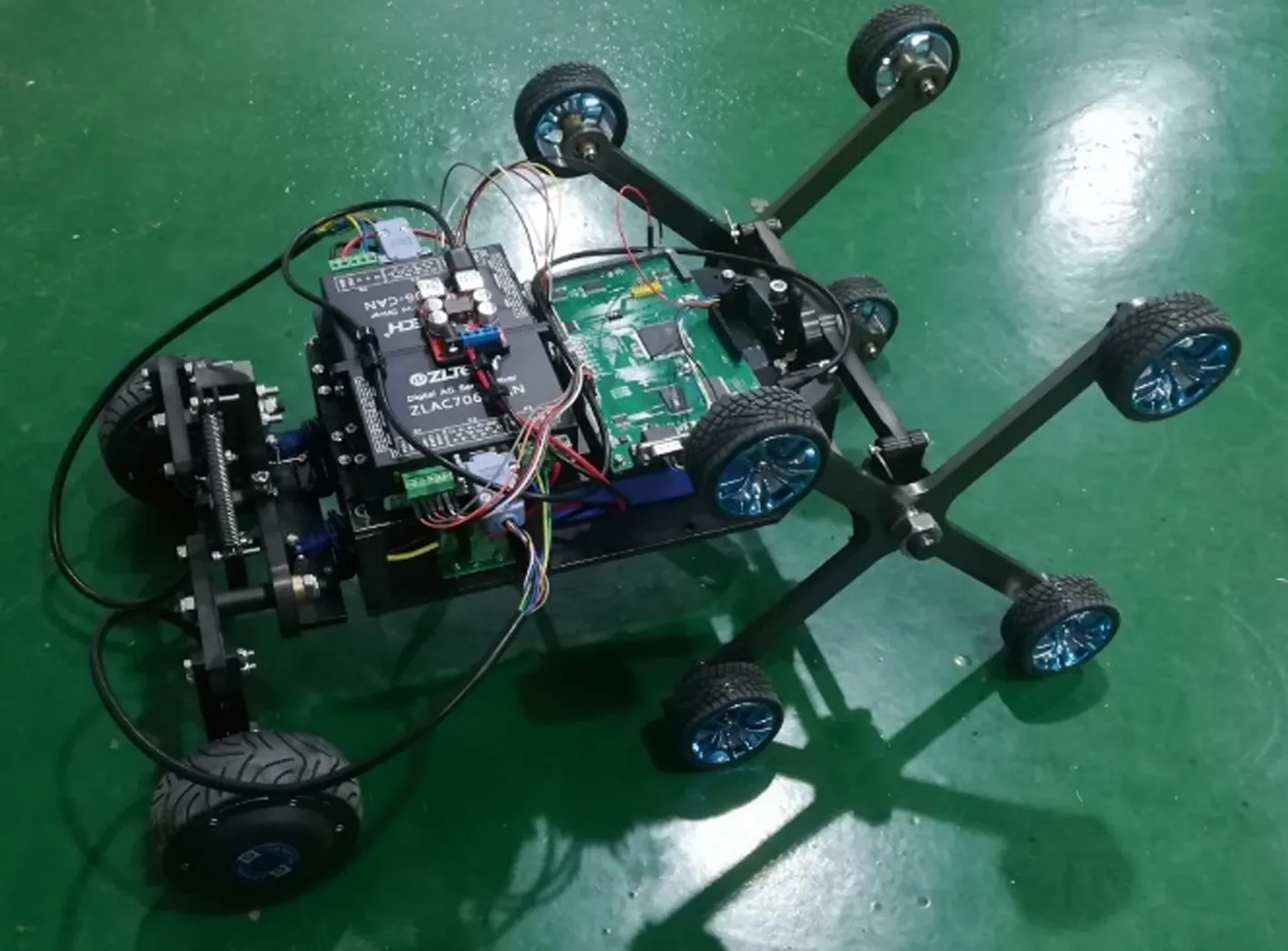
图10 移动平台实际整装图
图11为移动平台越障实验图,实验障碍物主要为高度20~80 mm的木块,移动平台向前运动,右侧车轮先遇到障碍物并被抬升,可以看到前部越障结构能够很好地适应地形,后部越障结构发生变形,同时车体没有明显的侧向倾斜,随后左侧车轮遇到障碍物被抬升,接着右侧车轮接触地面,后部越障结构开始反向变形,车体依然能保持较小的横向倾斜角度,最后全部车轮接触地面,后部越障结构回复,但未能回复到完全水平,这是因为回复到接近水平的位置时,两侧拉簧的拉力相近,相差的拉力不足以使后部结构继续变形。
4 结论
(1)为适应横向非结构地形,提出并研制出一种拥有被动悬架的轮式移动平台。
(2)对移动平台的越障结构和弹簧进行了理论分析,对其整体越障性能进行了仿真分析,并对一代样机进行了实验。
(3)实验结果表明,该越障结构能够较好地被动适应横向非结构地形,同时也发现了一些问题,如拉簧刚度大小的选择对越障性能、回复能力的影响。
