串联弹性驱动器的控制策略应用于工业机器人
2020-04-22王凤华史英明
王凤华, 史英明*, 万 媛
(1.唐山工业职业技术学院,唐山 063299;2.河北工业大学材料科学与工程学院,天津 300401)
机器人已经广泛被应用于工业、医疗及康复领域。由于工作环境的复杂和工作任务的多样化,人机安全性逐渐成为热点话题。将串联弹性驱动器(series elastic actuator, SEA) 应用于机械臂,可实现机械臂柔顺化动作、自调整接触、防碰撞等仿人性要求,降低发生意外时对机械臂本体和环境的二次伤害。串联弹性驱动器是一种具有仿生功能、可实现柔性控制的弹性驱动力输出设备,可以实现对相应的关节进行主动柔顺控制功能,因此受到广泛关注[1-7]。Wyeth[6]建立的SEA速度控制系统忽略弹簧阻尼,将弹簧简化为纯刚度模型,建立了SEA速度源模型。意大利理工学院的Tsagarakis等[7]建立的SEA阻抗控制模型通过速度控制器调控电机的速度输出,进而控制SEA弹性单元在确定负载下的弹性变形,以达到期望的输出阻抗。此外,也有学者利用导纳原理[8]、遗传算法[9]和接触控制[10]等控制方法针对SEA在不同应用环境中的控制需求,进行了相关的研究工作。基于此,针对ABB IRB14000双臂机器人串联弹性驱动器提出了基于力/位置混合的驱动控制方法,使得机器人在到达指定位置的同时,能够同时实现机器人示教功能。
1 SEA关节零力控制系统设计
1.1 零力控制原理
机器人零力控制指的是当机器人受到外部力作用后,由外力控制机器人运动,使机器人关节处于等效失重的状态,运动速度随外力的变化而变化,也叫顺应性跟踪控制。零力控制是直接示教控制方案的关键技术。示教作为人机协作的主要方式之一,能够更加直观的操作,降低工人水平要求,节约程序开发时间,提高生产率。因此在机械臂控制过程中,实现零力控制对实现人机协作以及提高公司效益具有重要意义[11-14]。零力控制大体上可分为两类[15-16],一类是以机器人位置/速度算法为核心的零力控制技术,机器人工作在位置/速度控制模式下,控制器是将外部力的大小和方向通过位置/速度算法转变为相应的位置/速度指令,控制机器人实现顺应跟踪运动,而外部力通常是由力矩传感器获取;另一类是以机器人关节力矩作为核心的零力控制技术,机器人工作在力矩控制模式下,控制器估算机器人所受重力和摩擦力的大小后直接输出相应大小的力矩值,就可以使机器人克服自身惯性力,跟随外部力而运动。现采用基于位置/速度控制的零力控制技术,其控制原理如图1所示。

图1 控制原理图
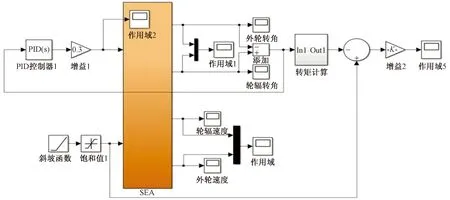
图3 零力控制SIMULINK程序图
1.2 零力控制过程
由于机器人的SEA关节为水平放置,因此将不需考虑重力的影响,同时为了能更直观的观察SEA 性能,忽略摩擦力的影响,仅以SEA的检测力矩作为观察对象。而SEA的测力原理是依靠分体式旋转编码器对轮辐和外轮的角度差的测量来间接实现对力矩的测量,因此其检测的力矩即是外轮和轮辐的转角差。因此,基于SEA关节的零力控制流程图如图2所示。

图2 零力控制流程图
零力控制过程为:当外力拖动机械臂运动时,机械臂带动SEA轮辐转动,轮辐压缩弹簧并通过编码器测量弹簧的压缩量和拖动力矩,编码器测量的轮辐与外轮的转角差传递给控制器,控制器根据编码器反馈值控制伺服电机转动,实现对拖动力的顺应性运动。
2 SEA关节的零力控制设计及仿真
2.1 SEA关节的零力控制设计
在仿真环境中搭建SEA关节的零力控制系统图,如图3所示,仿真结果如图4和图5所示。其中图4中的拖动力为阶跃力的仿真曲线,图5中的拖动力为正弦力仿真曲线。
2.2 SEA关节的零力控制仿真
通过对图4阶跃响应仿真曲线分析可知,SEA 关节在受到1 N·m的外力拖动后,由于弹簧的存在,力矩响应的初始阶段会出现波动,测量的力矩值最大会达到0.14 N·m,但是,随着关节的转动,力矩值会迅速减小,最终稳定在0.007 N·m,如图4(a)所示;通过对角度曲线图4(b)和速度曲线图4(c)分析可知,关节在初始受力拖动后,速度快速增加达到稳定速度,而关节的转角则匀速增加,另外,由于弹簧的作用,在速度初始阶段,轮辐速度稍大于外轮速度,但最终速度会达到一致,而轮辐的转角则因为弹簧的压缩稍大于外轮转角。通过图5正弦响应曲线图可知,在峰值力矩为1 N·m,周期为10 s 的正弦外力拖动下,测量力矩的峰值为0.014 N·m,并随着正弦拖动力周期性变化。
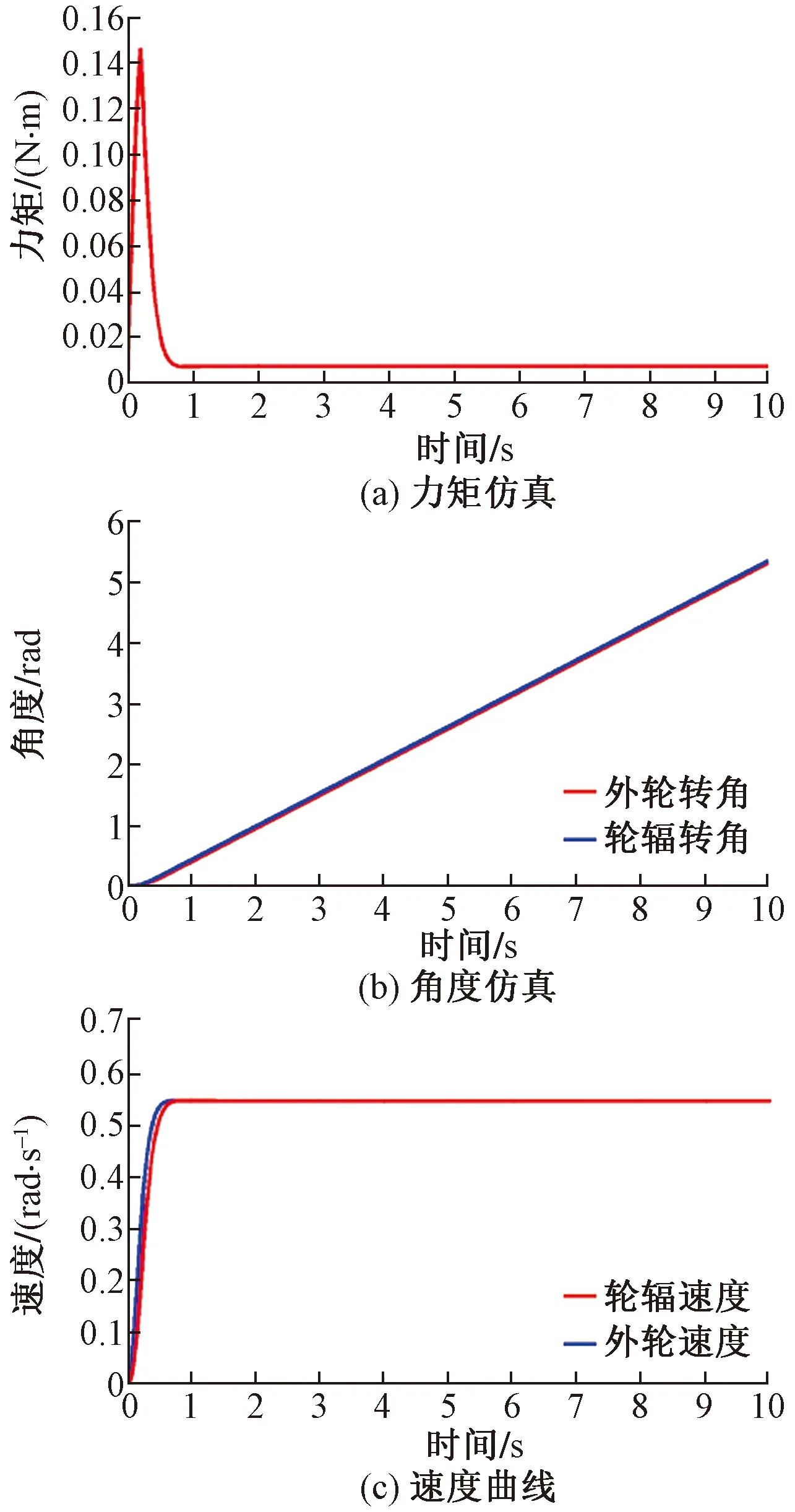
图4 零力控制阶跃响应曲线图
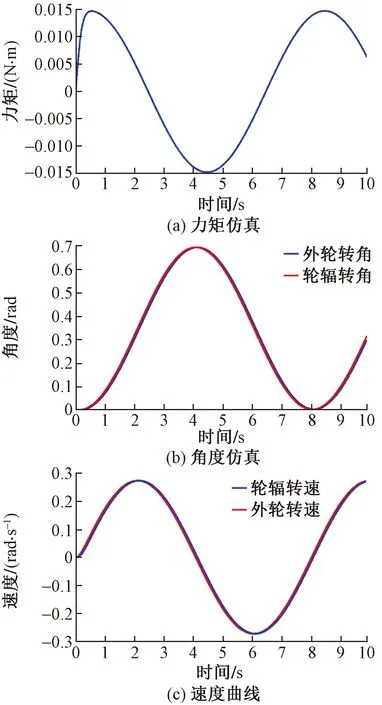
图5 零力控制正弦响应曲线图
3 SEA关节PID位置控制系统设计及仿真
3.1 SEA关节PID位置控制系统设计
比例-积分-微分(proportion integration differentiation, PID)控制器是将系统误差经过比例(P)、积分(I)、微分(D)后计算出控制量,再输入到控制对象的一种控制方法。它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制领域主要控制技术之一[17-19]。其控制原理图如图6所示。图6中,r(t)是期望输入,y(t)是被控对象的实际输出,e(t)是期望输入与实际输出的误差,u(t)是PID控制器的输出,其值是经过比例、积分、微分运算结果的和,PID 控制算法的数学表达式如式(1)所示。
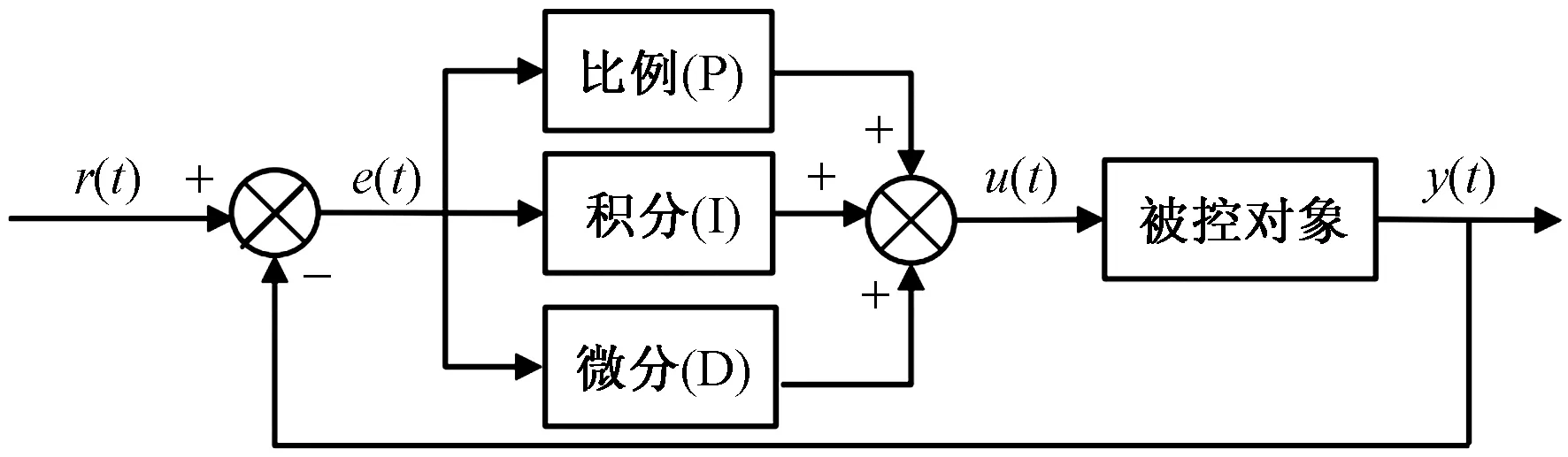
图6 PID控制原理图

(1)
式(1)中:Kp、Ki、Kd分别是比例、积分、微分环节的参数。分别调整PID控制环节的三个参数,对系统的上升时间、超调量、调节时间及态误差等系统参数会产生不同的影响效果。
将PID控制算法应用于SEA关节,其控制原理图如图7所示,采用包括速度环和位置环的双闭环控制系统,位置环用于SEA 关节的位置控制,速度环则用于SEA关节的速度调节。由于在SEA的弹性单元中包含弹簧,因此,如果仅采用位置环,在对SEA关节进行位置控制时,必然会导致SEA关节的抖动,无速度环调控的系统响应曲线如图8所示。

图7 SEA关节PID位置控制原理图
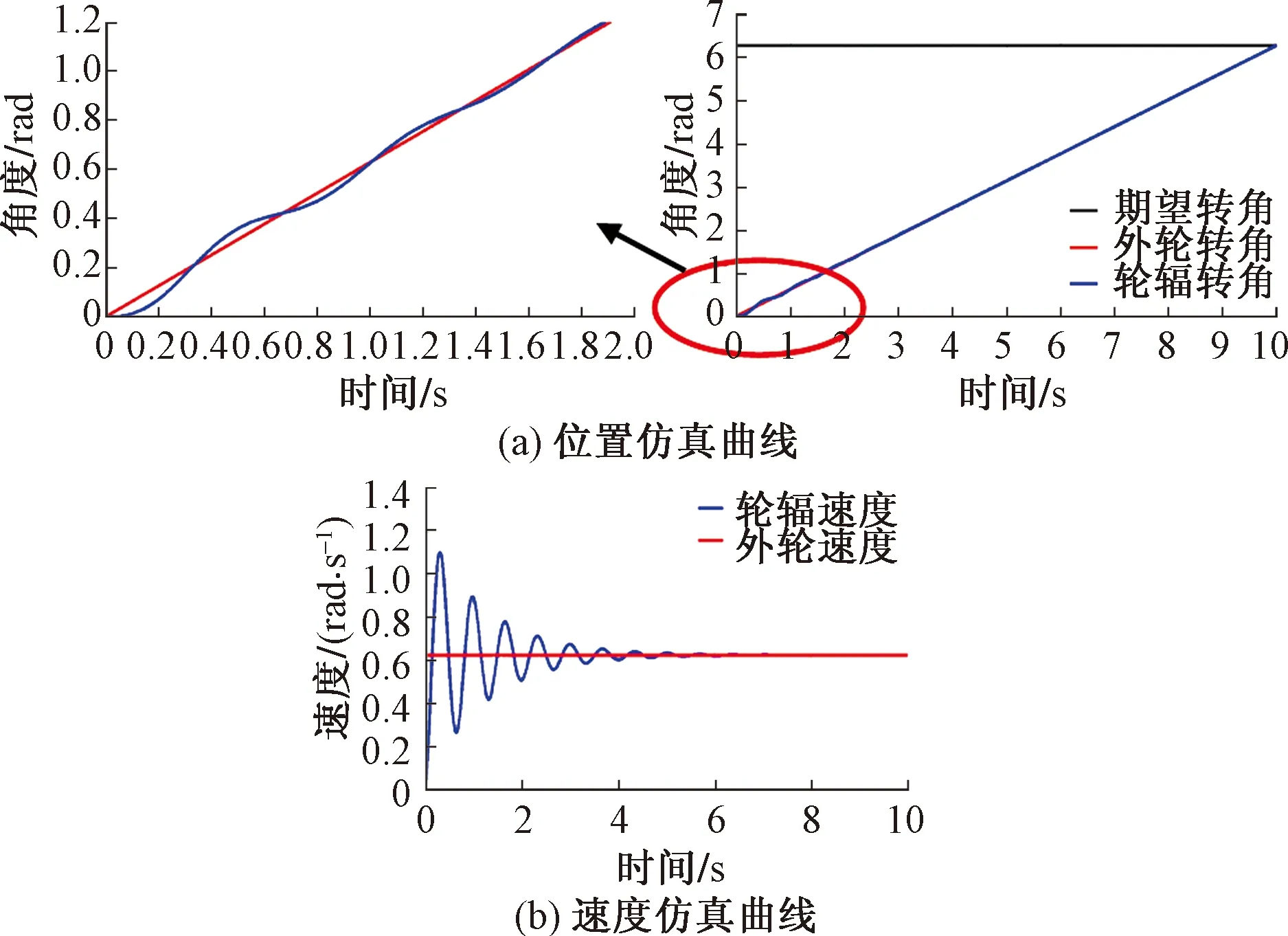
图8 无速度环的仿真曲线图
通过图8(a)位置曲线图可以看出没有引入速度环调控时,轮辐的位置曲线初始阶段会有轻微的波动,但最后轮辐和外轮的位置曲线会逐渐重合,然后以相同的速度达到期望位置;从8(b)的速度曲线图可以看出,由于弹性单元的存在,轮辐的速度在初始阶段会有很大的抖动,然后逐渐衰减到稳定值,而外轮则在给定的速度下稳定运行,最终轮辐和外轮会以相同的速度运行。
3.2 SEA关节PID位置控制系统设计
为避免因弹性单元存在关节抖动,SEA关节位置控制采用双闭环PID 控制,其控制系统如图9所示,通过速度环来调控SEA关节的速度抖动,使机械臂能够以平滑稳定的速度运行,其仿真结果如图10所示。
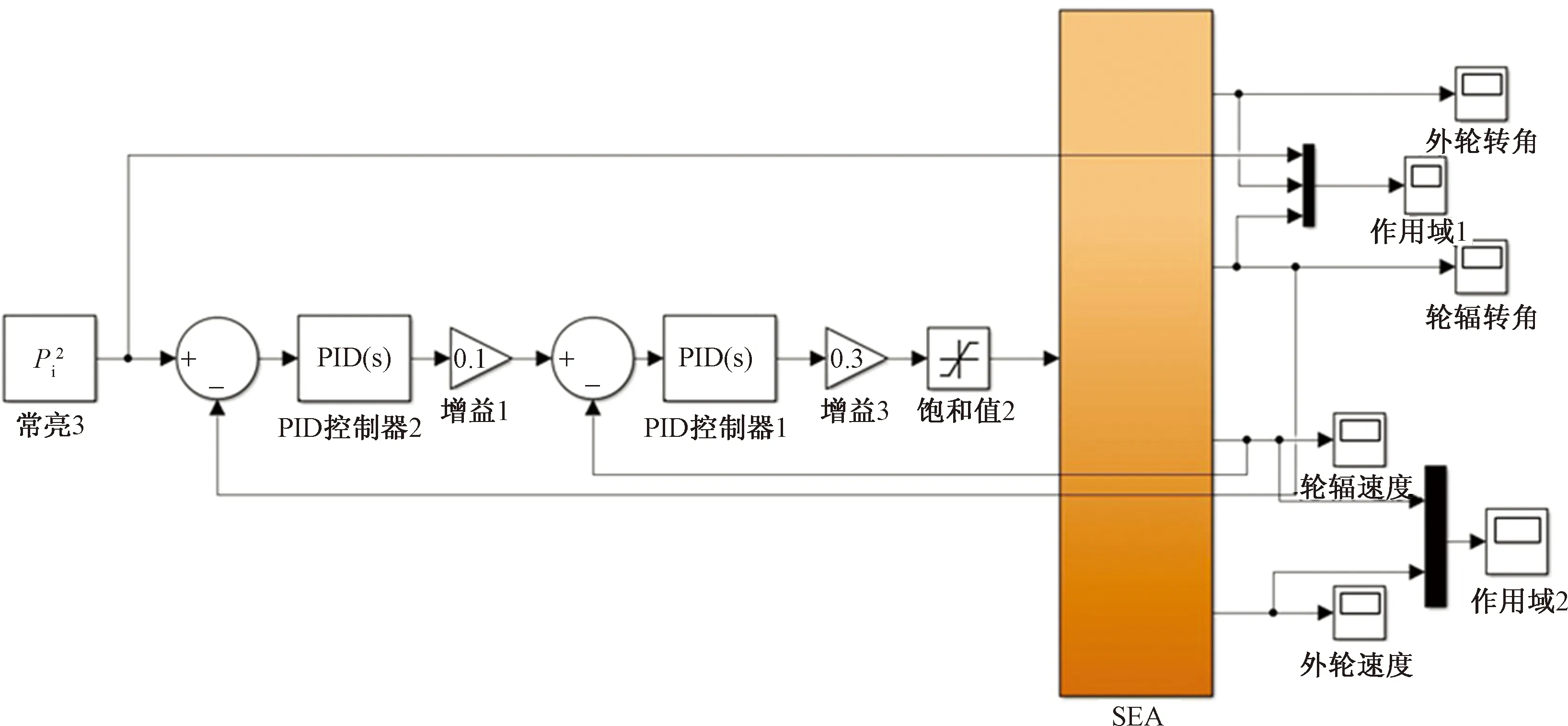
图9 SEA关节的虚拟样机控制系统图
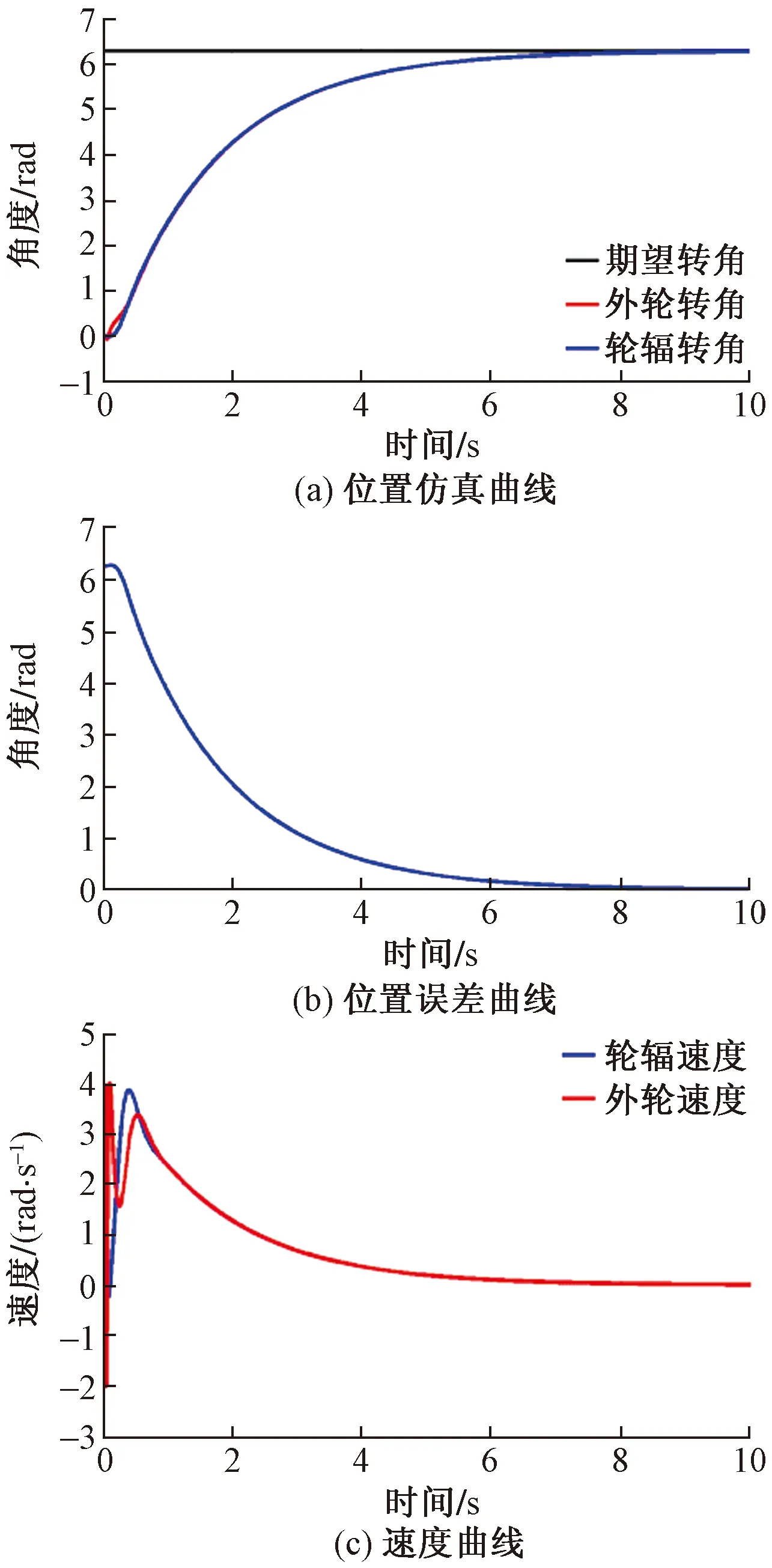
图10 位置控制仿真曲线图
通过图10双闭环控制系统的仿真曲线可以看出,增加速度环控制后,SEA关节仍能达到期望位置,而其速度曲线在初始阶段,外轮速度和轮辐速度都存在一定的波动,但会迅速衰减,调节时间减少,然后以相同的速度运行,达到了抑制关节抖动的目的。
4 SEA关节控制实验
4.1 SEA力跟踪实验
SEA关节控制实验平台包括:上位机(PC机),负责控制程序的编写;单片机作为下位机控制器,一方面接收SEA编码器的信号,另一方面则控制SEA进行期望运动;电气控制柜是SEA关节的供电系统。
SEA关节力跟踪实验是为了验证其响应速度和响应的连续性,在特定的输入信号下,观察SEA关节的力输出信号。本实验控制系统采用SEA速度源模型,当SEA关节末端固定时,以阶跃信号作为系统输入,采集SEA关节的力输出信号,实验结果如图11所示。
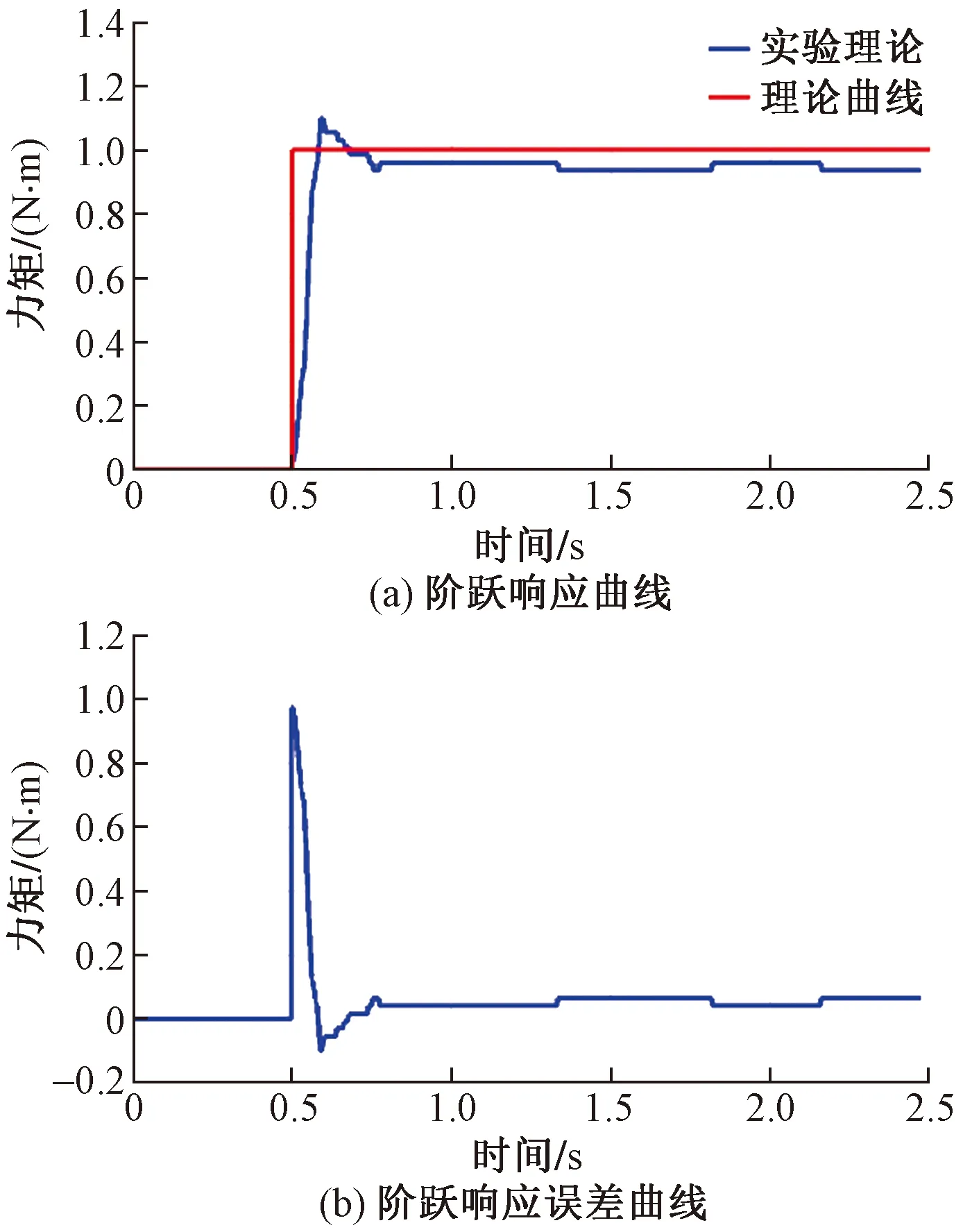
图11 SEA力跟踪实验图
通过实验结果分析可知:SEA关节对阶跃信号的跟踪比较理想,响应速度快,上升时间为0.1 s,调节时间为0.25 s,超调量为10%,稳态误差在5%左右,但响应曲线在稳定阶段存在轻微的波动,另外由于SEA关节的测量力矩的精度比较低,响应曲线并不是平滑的曲线,而是阶梯状的形式。
4.2 零力控制实验
SEA关节零力控制实验如图12所示,以外部拖动力作为输入,单片机采集SEA 编码器的反馈信号,转化为力矩值,通过控制器中力-速度算法计算出相应的速度信号,控制电机跟随拖动力运动,使得关节力矩接近于零。实验过程中关节力矩值如图13所示,电机速度值如图14所示。
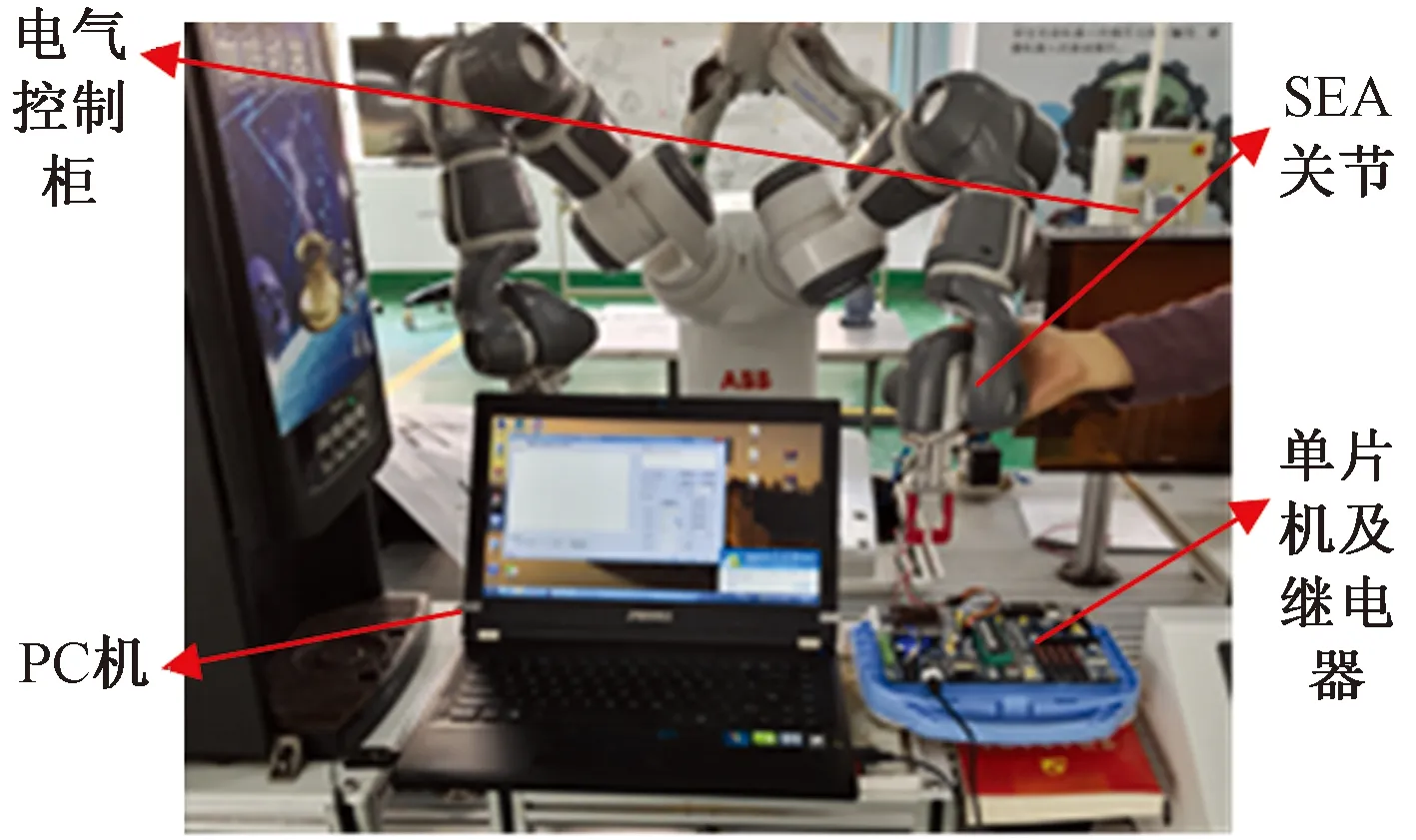
图12 零力控制实验
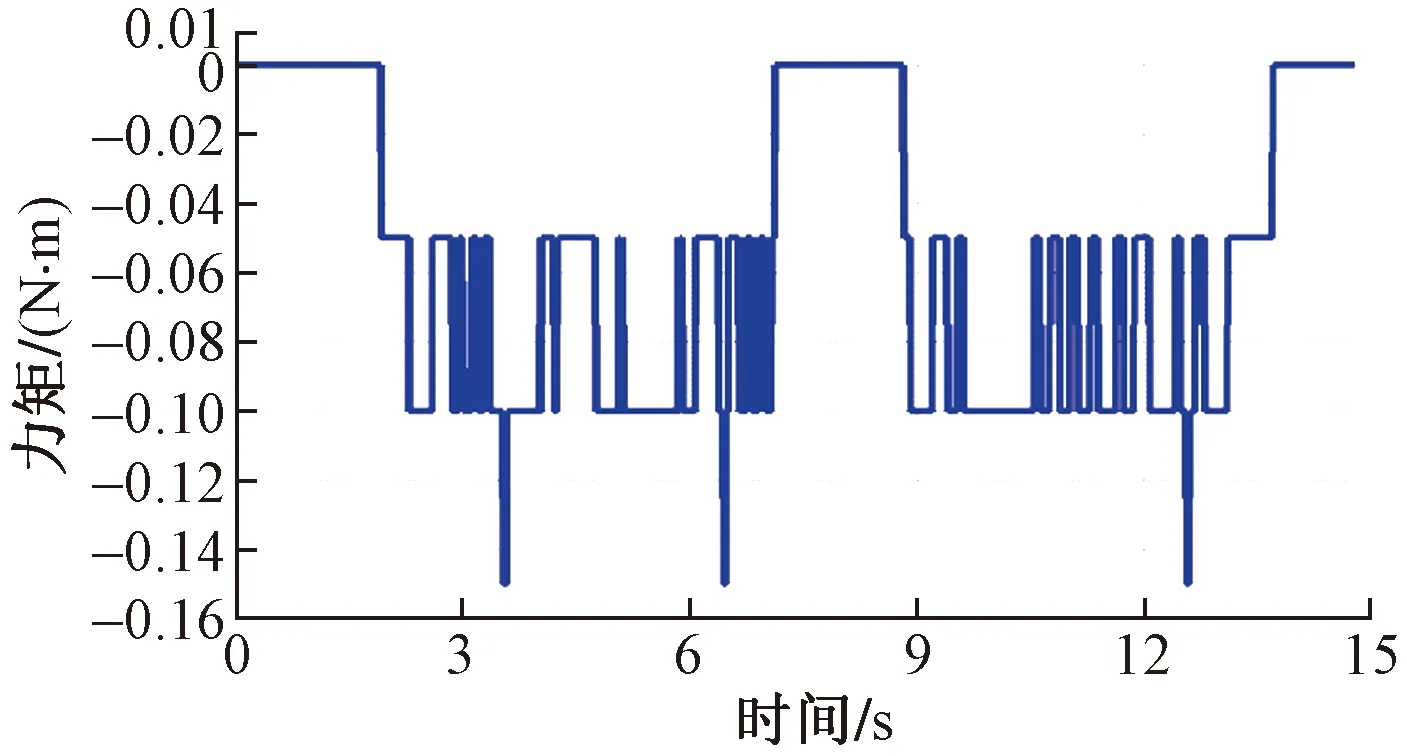
图13 零力控制关节力矩值
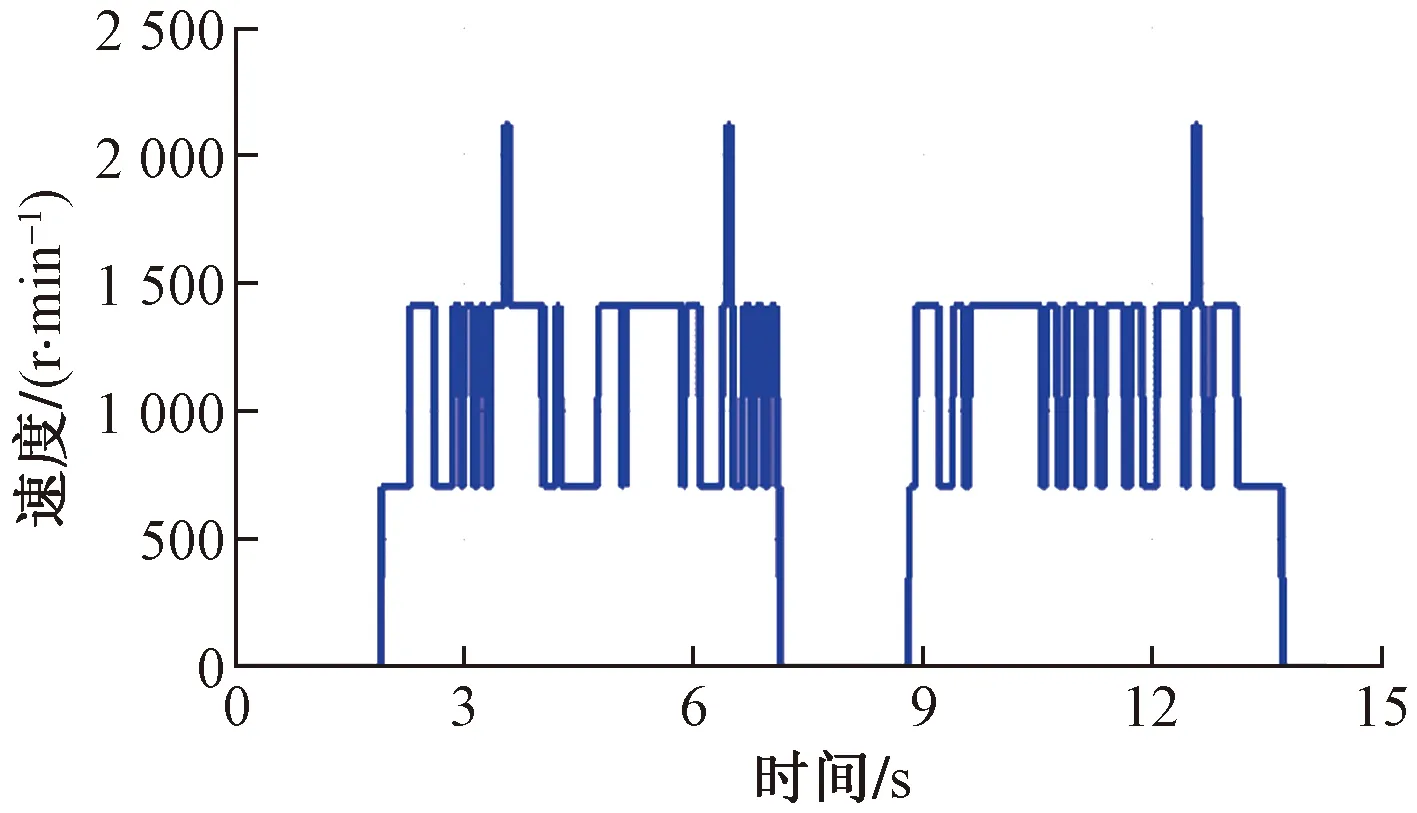
图14 SEA关节速度值
通过对实验过程分析可知,当通过外力拖动SEA关节时, 控制器可以通过关节力矩的反馈值控制电机运行, 并且关节速度随着力矩的变化而变化。通过图15所示的关节力矩图可以看出,在拖动过程中关节力矩值在0.05~0.1 N·m波动,当关节力矩值等于零时,关节立即停止运行。力矩值在0.05~0.1 N·m波动的原因一方面由于本文所设计的SEA采用的分体式旋转编码器为1024线,转换为力矩测量精度为0.048 N·m,关节力矩值在0.05~0.1 N·m波动,说明控制系统灵敏度较高,只要接收到关节力矩值能立即控制SEA运行。
另一方面由于在拖动过程中,关节力矩反馈值减小会导致关节控制速度较小,由于拖动力不变,关节速度的减小又会导致关节力矩值的增大,因此导致力矩值的上下波动。此外,由于拖动力不稳定,因此会出现力矩值的突变。通过图13和图14的对比可以看出,电机速度随着关节力矩值的增大而增大,当关节力矩值为零时,能立即停止运行。
5 结论
在SEA关节控制系统设计中,从SEA在机械臂中的实际应用出发,针对SEA自身柔顺的特点,完成了SEA单关节机械臂零力控制系统和PID位置控制系统的设计并通过仿真实验,得出以下结论。
(1)控制系统能够很好的提高机器人示教及控制水平。
(2)通过SEA力跟踪实验及基于SEA的零力控制实验,算法能够提高控制的可靠性和平稳性。
