基于高分辨率遥感影像的道路提取方法
2020-04-21杨泽运赵海洋张玉娟张加颍
杨泽运,赵海洋,王 强,张玉娟,张加颍
(1.黑龙江工程学院 科研处,黑龙江 哈尔滨 150050;2.黑龙江工程学院 测绘工程学院,黑龙江 哈尔滨 150050;3.黑龙江工程学院 外国语学院,黑龙江 哈尔滨 150050)
近年来,随着高分、Spot-7、WorldView-3、Pleiades等高空间分辨率遥感卫星的相继升空,高分辨率遥感卫星数据获取能力与处理技术日趋成熟,遥感影像中所蕴含的细节特征也日益丰富。同时,基于噪声、阴影等对目标特征的影响,使得作为重要地物元素的道路遥感影像自动提取仍是遥感图像处理的研究热点[1-3]。
道路是交通网络的主干,是城市建设的重要组成部分。因此,道路是地图制图和地理信息系统主要的记录和标识对象。随着遥感影像分辨率的逐步提高,影像中地物要素等细节也逐步丰富和突出,以往低分辨率影像中无法识别的地物信息,在高分辨率影像中清晰可见。但随着影像分辨率提高,环境因素、系统噪音等因素的影响也更为突出。为此,通过影像要素分类,消除或减小环境、噪声等影响,从而快速、准确地提取道路信息是遥感影像信息自动提取的重要研究内容之一[4-5]。
遥感影像分类有多种方法,如面向对象、最大似然、最小距离、神经网络、支持向量机等。其中以面向对象、最大似然、支持向量机分类效果较为明显。由于道路形状复杂种类繁多,其分类具有独特性[6-7]。利用高分辨率遥感影像地物纹理、形状与尺寸信息特征,辅助像元光谱信息,采取面向对象、最大似然、支持向量机三种方法对照实验,选择最适应实验区道路提取的最优方法。
1 道路信息提取方法
1.1 道路信息
在遥感影像要素分类提取前,须研究、分析所提取地物的特征信息,及与其他地物特征信息的差异,据此进行分类,提取道路信息。道路的特征信息为:
1)几何信息:高分辨率遥感影像中道路通常呈现条带状,且长度远大于其宽度,宽度变化仅体现在个别区域,拐角区域多为缓角。
2)辐射信息:道路通常有明显的边缘,同时道路上的DN值与邻近区域其他要素的DN值差别较大。
3)拓扑信息:道路通常是连续、衔接的线性要素,不会出现大面积缺段情况,且在测区较大的情况下会以道路网的形式体现。
4) 功能信息:道路是城市交通各种基础设施间的纽带,有连接性。
同时,其特征信息将受到环境因素影响,如树木和建筑物及其阴影、道路绿化带和车辆等将导致道路在高分辨率遥感影像中表现的灰度值不均匀。
1.2 道路分类方法
道路分类主要包括以下几种方法:
1)面向对象分类法:将分割后空间“连续”、光谱“同质”的像素集合(即对象)视为影像分析的基本单元,综合利用光谱信息和空间、纹理、形状等关联信息,把噪声区域与周边像元融合到特定的影像对象中,按分类要求根据一定的知识规则提取道路对象[9-10]。
2)最大似然分类法:按分类要求以各类密度函数正态分布为前提,按统计学原理建立像元归属判别函数集,构建判别函数集均值、方差、协方差等特征参数,确定先验概率密度函数,计算出目标像元对应分类类别的归属概率,把该像元归属到似然度最大的类别中,从而提取道路目标。
3)支持向量机(SVM)分类法:利用以统计学习理论为支撑的机器学习方法,将遥感影像上的地物分类为道路和非道路两类,寻找基于分类区分能力的支持向量构造分类器,从高分辨率遥感图像道路区域中由分类器提取出道路目标。
1.3 面向对象分类
面向对象在分类前须对影像预处理,进行影像分割与合并分块,以便得到预期的分类结果,影像分割流程如图1所示。
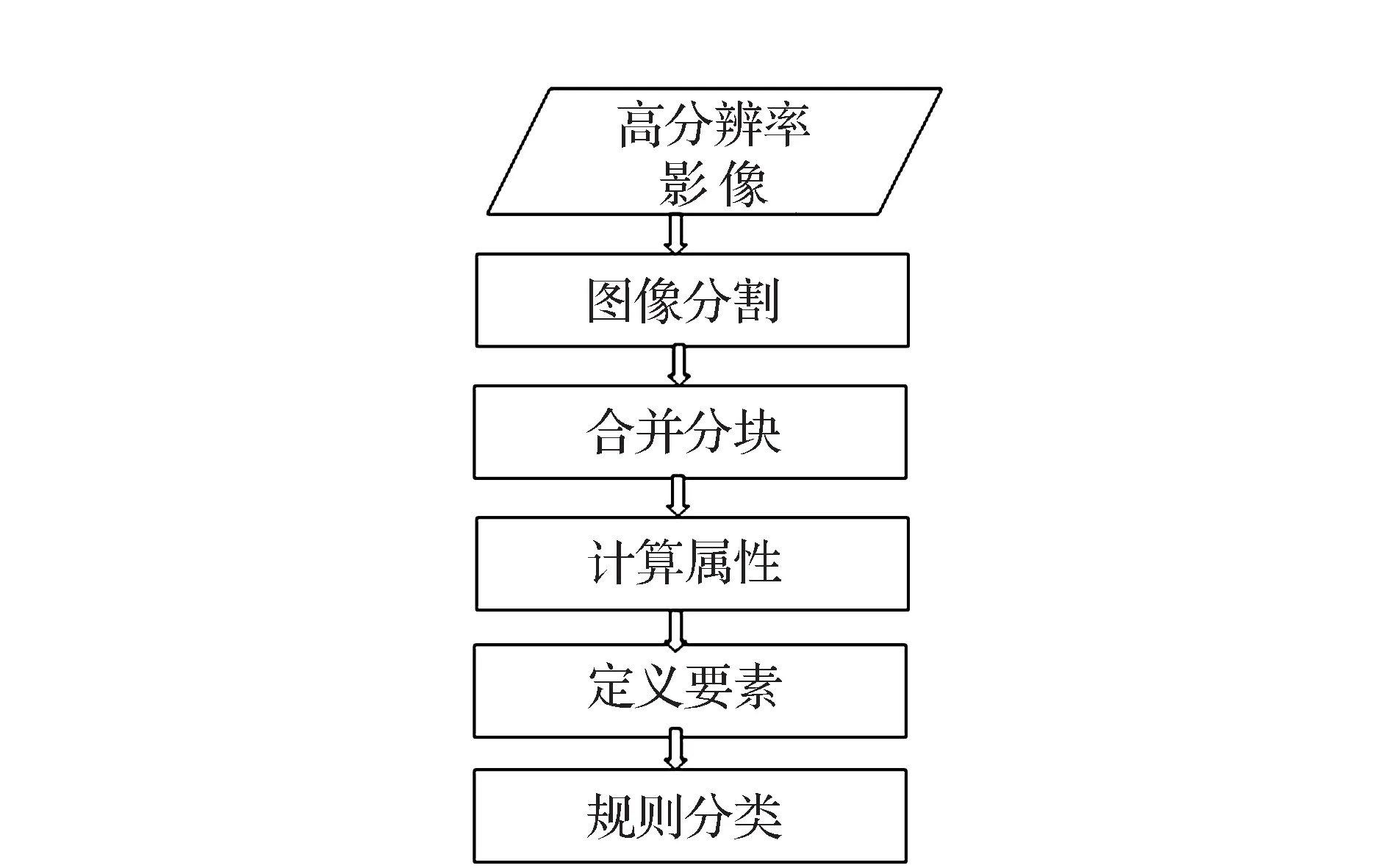
图1 影像分割流程
影像分割:根据影像相近像元亮度值、纹理特征、色彩等特点进行分割。分割尺度越大,生成的对象越大,对象数量越少。相反分割尺度越小,生成的对象越小,对象数量越多。需要根据目视解译判断最优的分割尺度,尽可能好地分割出边缘特征。
合并分块:图像分割时会因为阈值不同,导致一些分类对象被错分,或一个整体要素被分割成多个要素。此类情况须采取要素合并的方法对影像分割的要素类进行进一步整合。文中采用Full Lambda-Schedule算法,该方法曾用作分割合成孔径雷达影像。
计算属性:包括四种类型,即空间、光谱、纹理与高级属性(颜色空间和波段比),每种属性代表地物的一种特征。
定义要素:用来区分不同地物的属性组合。
规则分类:根据定义的要素进行分类。
2 道路分类结果与分析
2.1 研究区介绍
文中选取某区域图像(见图2),影像的空间分辨率为1 m,此影像中道路种类众多,有城镇街道、乡村道路等,将对道路、建筑/水泥地面、林地、草地、水系进行目标分类,对于全面提取道路更具代表性。

图2 研究区高分辨率影像
2.2 分类后处理
采用面向对象、最大似然、支持向量机三种方法分类时会出现细小的图斑,应对这些细小图斑进行分类处理,常用方法为最大最小值分析法、聚类处理法和过滤处理法。
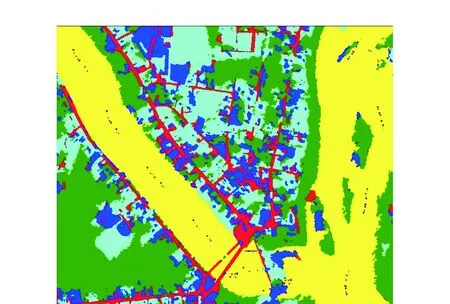
图3 面向对象分类结果
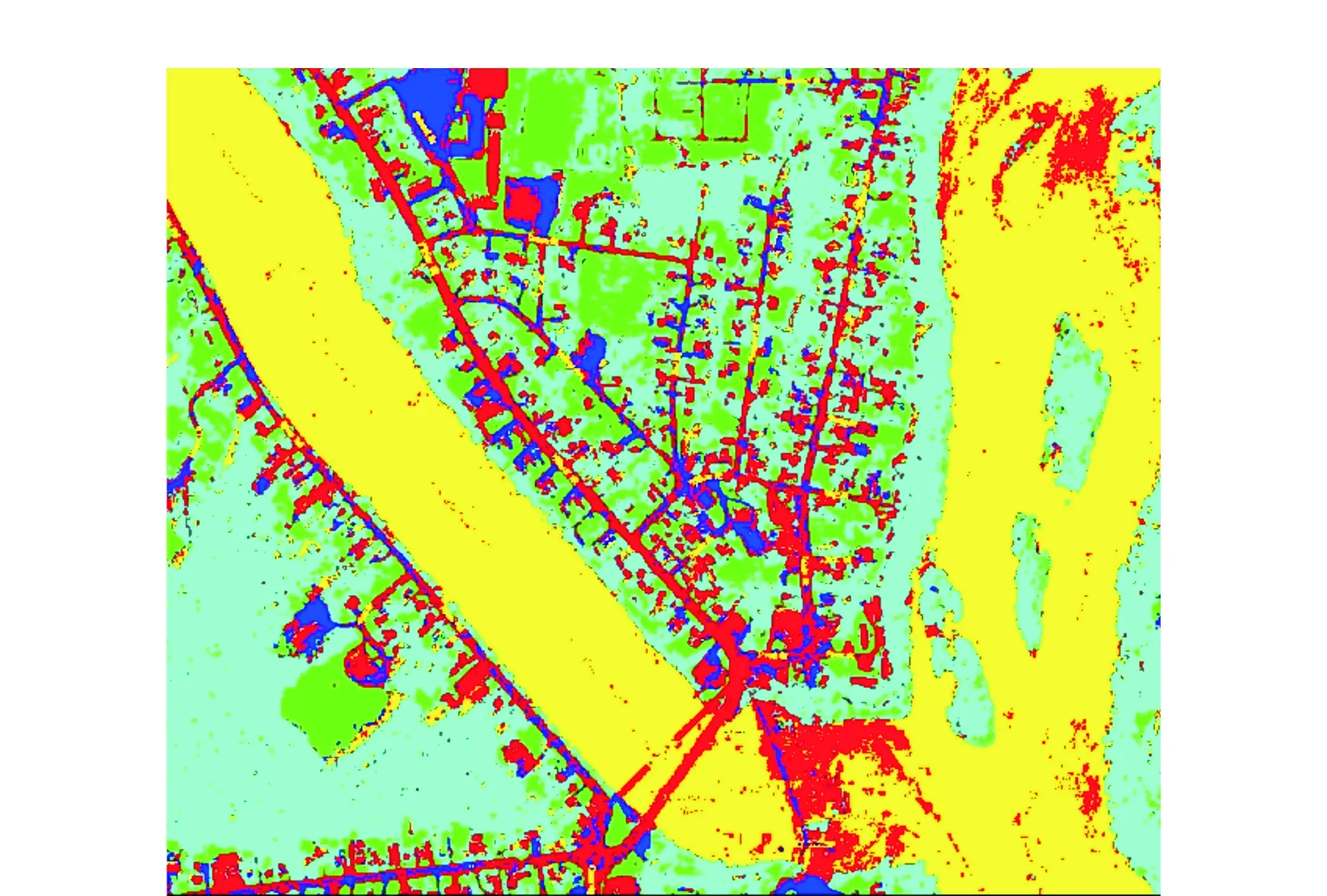
图4 最大似然分类结果
将面向对象、最大似然、支持向量机三种分类后的结果再进行细小图斑处理,即得到处理后的结果,如图3—图5所示。此时分类图像中的斑点或空洞已消除,同时消除被隔离的分类像元和删除未分类的像元。
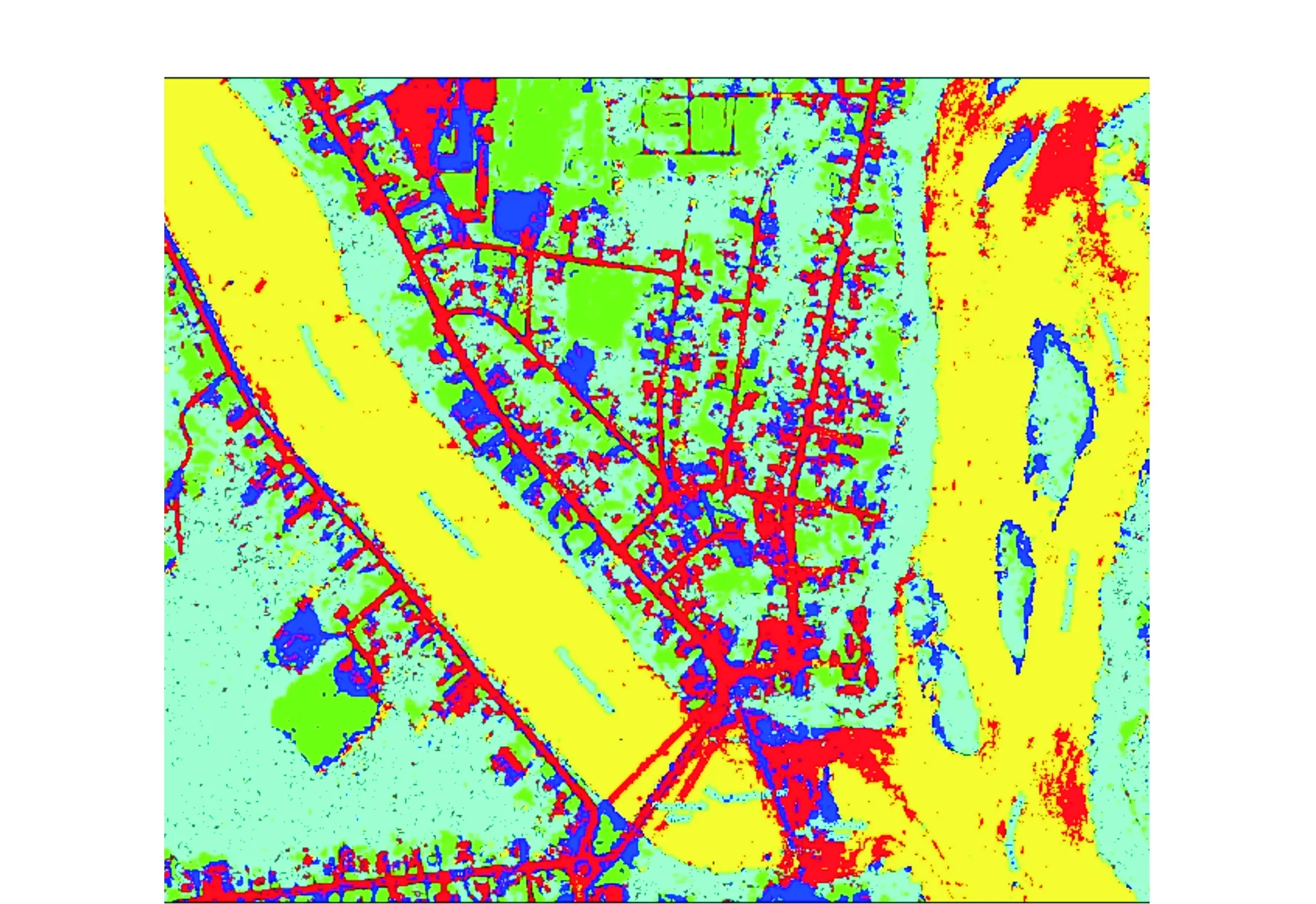
图5 SVM分类结果
2.3 分类精度评价
分类精度评定是将专题分类地图中的特定像元与已知分类的参考像元进行比较,可将分类数据与可清晰目视判别地类的原图像进行比较,评定其精度。在分类图像中随机产生8084个目标点进行分类对比,覆盖整个图像。通过手动的方式使用原始DOM影像进行目视辨别,添加每个点位的实际地物类别,再利用计算机根据分类后的专题地图,通过每个目标点的坐标值(X,Y)的一一对应关系,可以得出此次分类的精度评定报告(见表1—表3)。
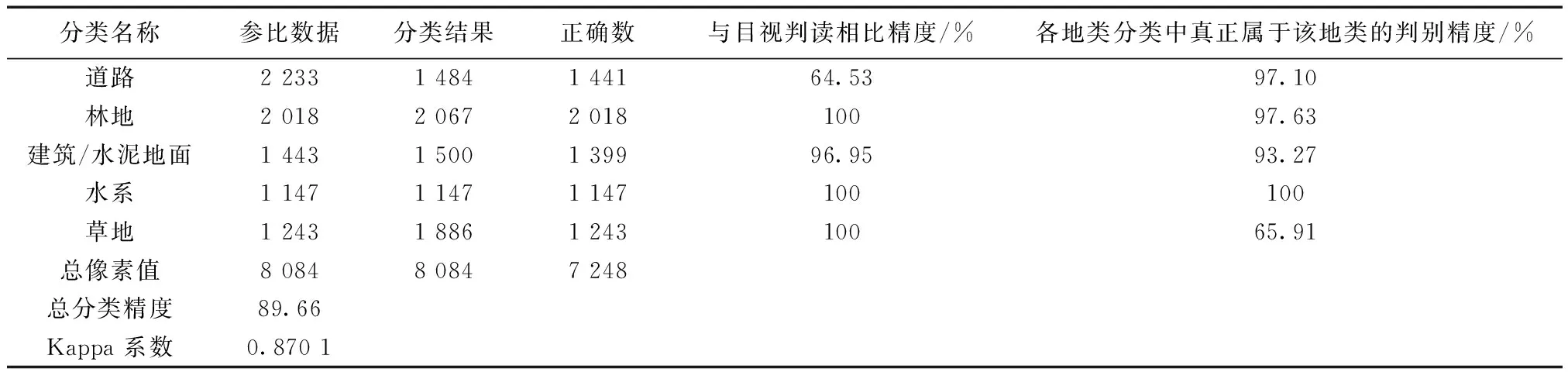
表1 面向对象分类方法精度评定表

表2 最大似然分类方法精度评定表
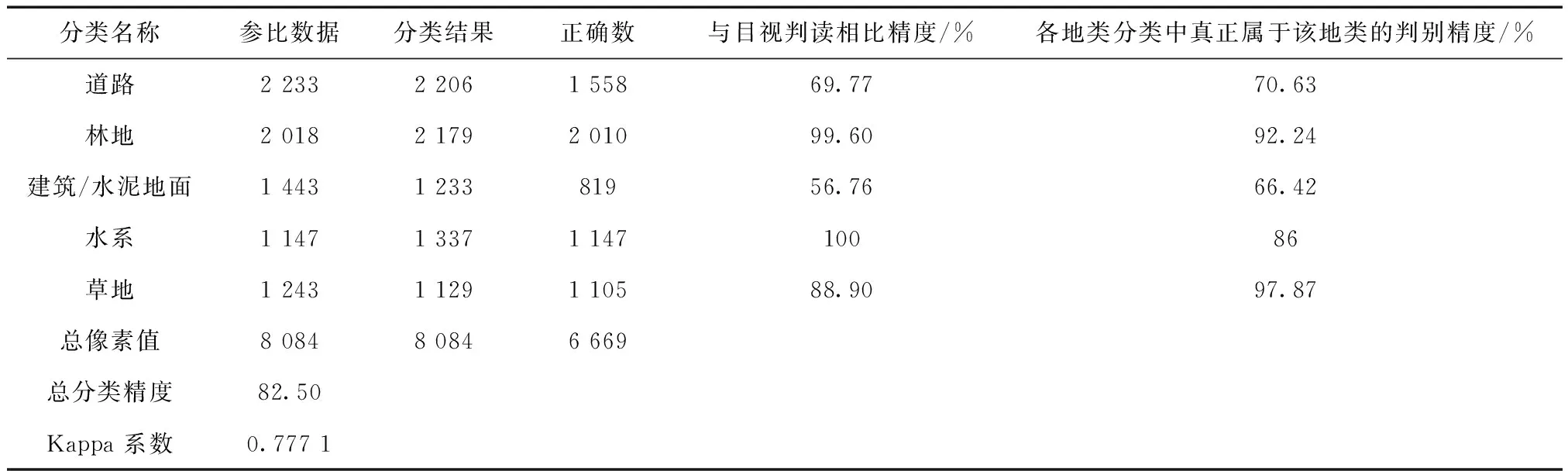
表3 SVM分类方法精度评定表
3 结 论
使用面向对象、最大似然、支持向量机三种分类方法对遥感影像进行分类,做分类后处理。根据分类结果,对比三种分类方法可知,面向对象法道路提取的总分类精度较高,获得的分类结果较为理想。面向对象法能够综合利用高分辨率遥感影像的波谱、几何、纹理等多种特征信息,可有效克服影响因素的干扰。影像分割与合并分块有利于提高要素属性的一致性和均质性,降低影像信噪比,减少同类要素的信息差值,突出不同地物的差异化,使地物要素可分性得以增加。对于高分辨率遥感影像的道路提取,可综合利用高分辨率影像蕴含的多种属性特征进行影像分割和合并,以提高样本训练精度,并通过采用面向对象等分类方法提高道路等地物要素提取的总体精度。