速度误差和地震噪声对最小二乘逆时偏移的影响分析
2020-04-21马振孙成禹彭鹏鹏姚振岸
马振,孙成禹,彭鹏鹏,姚振岸
(1.中国石油大学(华东) 地球科学与技术学院,山东 青岛 266580; 2.雅安市雨城区自然资源和规划局,四川 雅安 625000; 3.东华理工大学 地球物理与测控技术学院,江西 南昌 330013)
0 引言
随着计算机技术的快速发展以及勘探开发目标的日益精细化和复杂化,对地震叠前深度偏移技术的精确性、成像分辨率和保幅性均提出了更高要求,因此在常规逆时偏移的基础上基于反演理论的最小二乘逆时偏移应运而生。与常规逆时偏移相比,最小二乘逆时偏移具有高分辨率、高保幅性以及噪声少的优势,对于复杂的地质构造成像更加精确。然而,最小二乘逆时偏移对于偏移速度场的精度要求较高,其精确成像依赖准确的偏移速度,速度估算不准确时点绕射在偏移剖面表现出上翘或下拉现象,即通常说的偏移过量或偏移不足。同时在实际的勘探中地震资料中往往混杂着大量的噪声,噪声对速度分析的精确性有直接影响,同时也影响地震偏移成像的品质,分析噪声对最小二乘逆时偏移的影响程度也是有必要的。因此研究最小二乘逆时偏移在不同条件下的成像特征,有助于处理人员做出适当的调整,使最小二乘逆时偏移更好的为复杂构造、岩性和地层圈闭油气藏的勘探与开发服务。
Lebras等[1]最先提出最小二乘偏移反演的思想,Lambaré等[2]进行了完善,Nemeth等[3]在地震偏移中引入最小二乘算法,进行Kirchhoff最小二乘偏移。逆时偏移[4-7]成像技术出现之后,国内外学者在逆时偏移的基础上发展了基于反演理论的最小二乘逆时偏移[8-10]。在偏移技术[11-13]的不断发展过程中,国内外学者对其不同条件下的成像特征做了相关的研究,Versteeg等[14]分析了叠前深度偏移对速度模型的敏感性,认为平滑后的真实速度模型仍可用作叠前深度偏移。Lines等[15]在双曲时差方程的基础上,研究了速度误差、炮间距等对成像深度的影响。Grubb等[16]分析了AVO和偏移结果同相轴深度受速度不确定性的影响。叶月明等[17]分析了几种典型叠前深度偏移方法对偏移速度的敏感性,为实际情况选取合适的偏移方法提供依据。Zhu等[18]研究了速度误差对叠前和叠后偏移成像的影响,从数学和几何方面分析了偏移剖面中出现的点绕射上翘和下拉现象。Parkes等[19]提出偏移速度场对成像结果影响较大,偏移成像过程中重点应放在提高输入速度场的精确性方面。熊晓军等[20]分析了速度误差在偏移剖面中引起的假象,指出偏移速度存在误差不仅会带来深度误差,同时对构造体的形态产生影响。Shan等[21]研究了逆时偏移对偏移速度的敏感性,指出RTM在强波阻抗界面处更容易产生虚假反射。勾丽敏等[22]研究了随机噪声和规则噪声对叠前深度偏移层速度估计精度的影响。邹少峰等[23]分析了地震信号中的噪声对偏移结果的影响,得出叠前深度偏移比叠加具有更强的压制噪声能力。
为了分析速度误差和地震噪声对最小二乘逆时偏移的影响,本文基于Marmousi模型进行最小二乘逆时偏移成像,将其成像结果与逆时偏移成像结果进行了对比,分析最小二乘逆时偏移在高分辨率成像中的优势;同时针对偏移过程中常见的速度系统误差、速度平滑以及地震资料中存在噪声的情况,本文利用不同偏移速度及不同含噪的地震数据进行最小二乘逆时偏移成像,对比分析不同条件下的成像结果同时与逆时偏移成像结果进行对比,得到几点结论,可为实际生产提供基础指导。
1 方法原理
1.1 最小二乘逆时偏移
在常密度介质的前提下,波动方程在频率域内表示为:
[2+ω2s2(x)]u(x,xs,ω)=-f(ω)δ(x-xs) ,
(1)
其中:ω为频率,s(x)表示介质的慢度,u表示总波场,f(ω)为震源函数,δ(x-xs)为脉冲函数。
由波动方程可知,在研究区域内速度扰动与波场的扰动存在如下关系:
(2)
相应波场为:
u(x,xs,ω)=u0(x,xs,ω)+us(x,xs,ω) 。
(3)
其中:s0(x)为背景参考慢度,Δs(x)为介质慢度的扰动,u0(x,xs,ω)为背景慢度产生的波场,us(x,xs,ω)为扰动慢度产生的扰动波场。
同时,背景波场u0(x,xs,ω)满足下式:
[2+ω2s2(x)]u0(x,xs,ω)=-f(ω)δ(x-xs)。
(4)
将式(2)(3)(4)代入式(1),基于线性Born近似,可以得到:
(5)
引入背景介质中Green函数:
(6)
可以得到背景波场u0(x,xs,ω)及扰动波场us(x,xs,ω):
u0(x,xs,ω)=f(ω)G(x,xs,ω) ,
(7)
G(xr,x,ω)dx。
(8)
其中:xr为检波点位置,xs为震源位置,G(x,xs,ω)表示从震源位置xs传播到散射点x的Green函数,G(xr,x,ω)表示从散射点x传播到检波点xr的Green函数。
式(8)仅表示波传播过程中,忽略了二阶以上的散射波的一阶散射波的传播现象。Born近似描述的物理含义为:在背景波场u0(x,xs,ω)中没有散射场;在扰动波场中仅包含一次散射场。目前对最小二乘逆时偏移的讨论主要基于式(8),称之为线性化最小二乘逆时偏移。为了使后续表达式更加简洁,将式(8)改写为:
us=Lm,
(9)
其中:L(ω,xs,xr,x)=ω2f(ω)G(x,xs,ω)G(xr,x,ω),其中L通常被称为反偏移算子。为求取模型参数扰动m,基于最小二乘方法求解(9)式。最小二乘意义下的误差泛函可表示为:
F(m)=‖us-Lm‖2。
(10)
求解目标函数,其最小二乘解为:
m=(LTL)-1LTus=H-1LTus,
(11)
式(11)中,H-1表示Hessian逆矩阵,LTus即为逆时偏移的结果。逆时偏移过程中采用PML吸收边界,2N阶有限差分的稳定性条件为:
(12)
其中:Δt为时间步长,Δx和Δz分别为沿x和z轴的空间采样间隔,v为相应坐标点上的速度,a是对应的差分系数。
通过式(11)可以得出, 最小二乘逆时偏移的核心算法是通过判断偏移结果与地震数据的匹配程度来判断偏移成像的准确性,同时根据数据残差对成像结果进行修正,通过不断的迭代实现二者的最佳匹配,当数据残差满足期望值时则可以停止迭代过程,得到更加真实的成像结果。
1.2 速度误差对最小二乘逆时偏移的影响
最小二乘逆时偏移是一种高精度的叠前深度偏移成像方法,其对于偏移速度场的精度要求较高,速度估算不准确时,点绕射在偏移剖面表现出上翘或下拉现象,即通常说的偏移过量或偏移不足。在几何地震学中,偏移速度与地层深度可以表示为:
(13)
(14)
其中:Δvm表示速度误差,Δz为深度误差。从式(14)可以直观看出,当偏移速度偏大即Δvm>0时,此时Δz>0,成像位置变深;当偏移速度偏小即Δvm<0时,则Δz<0,成像位置变浅。当地质构造复杂,速度局部变化剧烈时,深度误差与速度误差之间的关系趋于复杂,但成像位置与实际地层位置相对关系不变。
1.3 地震噪声对最小二乘逆时偏移的影响
以积分的角度分析,最小二乘逆时偏移过程可以视为叠加过程,当地震信号中存在噪声时,对于N次覆盖的某成像点,从信号和噪声两方面可将成像结果表示为:
(15)
2 数据测试
2.1 精确速度成像结果
本文选取如图1所示的Marmousi模型对最小二乘逆时偏移的适应性进行研究。这里Marmousi模型大小为横向4.61 km,纵向2.84 km。地震记录用时间2阶空间8阶有限差分正演所得。正演模拟时,垂向和水平方向网格大小均为10 m,时间步长 1 ms,记录时长5 s,子波主频25 Hz。炮记录共92炮(起始炮点位置0.05 km,终止炮点位置4.6 km),每炮共461道接收,每道5 000个采样点,时间采样率1 ms,记录5 s,道间距10 m,炮间距均为50 m。图2分别为逆时偏移和最小二乘逆时偏移迭代20次的精确成像结果。当用精确的速度作为偏移速度时,逆时偏移和最小二乘逆时偏移都能正确成像。在中部背斜构造处,由于背斜右翼较为陡峭,最小二乘逆时偏移构造分层更加明显,分辨率更高,且最小二乘逆时偏移对断层构造及小尺度构造展布更加清晰。

图1 Marmousi模型Fig.1 Marmousi model
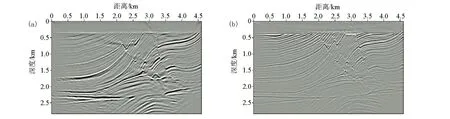
a—逆时偏移;b—最小二乘逆时偏移a—reverse time migration;b—least squares reverse time migration图2 精确偏移速度成像结果Fig.2 Accurate migration velocity imaging results
2.2 速度误差的影响
2.2.1 速度系统误差的影响
分别利用Marmousi模型速度整体增大5%和减小5%作为偏移速度进行最小二乘逆时偏移,图3为最小二乘逆时偏移迭代20次后的成像结果。对于偏移速度整体减小5%的成像结果,剖面中同相轴的位置变浅;断点处绕射波不能收敛,出现向下弯曲的同相轴,影响断层的边界识别;剖面1.5 km以下的部分同相轴较为杂乱,构造形态失真,难以反映真实的构造形态,同时对地质层位追踪解释造成困难。对于偏移速度整体增大5%的成像结果,剖面中同相轴位置变深;断点处绕射波不能收敛,出现向上弯曲的同相轴,对断层的边界识别产生不利影响;剖面1.5 km以下的部分同相轴较为杂乱,同样很难反映真实的构造形态。中深部左侧的高速楔状体上界面精确位置位于2.25 km处,偏移速度减小时,上界面成像位置为2.1 km,偏移速度增大时,上界面成像位置为2.55 km,偏移速度的增大显然比偏移速度减小引起的深度误差更大。但是对于该高速楔状体的形态而言,偏移速度减小时,顶底界面夹角明显变小,相比偏移速度增大的成像结果形态失真程度更大。图4为相同误差偏移速度下逆时偏移的成像结果,通过与最小二乘逆时偏移成像结果对比可以发现,逆时偏移和最小二乘逆时偏移成像结果都受速度误差影响较大,两者都难以反映地下实际构造形态。
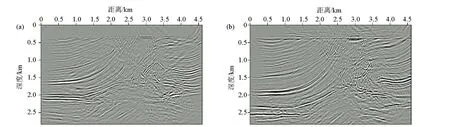
a—偏移速度减小5%;b—偏移速度增加5%a—migration velocity decreases by 5%;b—migration velocity increases by 5%图3 不同系统误差偏移速度的最小二乘逆时偏移成像结果Fig.3 Least squares reverse-time migration imaging results with different system error migration velocities
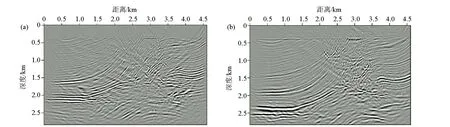
a—偏移速度减小5%;b—偏移速度增加5%a—migration velocity decreases by 5%;b—migration velocity increases by 5%图4 不同系统误差偏移速度的逆时偏移成像结果Fig.4 Reverse time migration imaging results with different system error migration velocities
图5为不同偏移速度进行偏移成像时,最小二乘逆时偏移迭代收敛的情况。从图中可以明显看出,利用精确偏移速度进行偏移时,偏移迭代过程泛函收敛快,偏移速度存在误差时,偏移迭代过程泛函收敛很慢,得到的偏移结果的反偏移合成数据和原始地震记录之间存在的误差大,偏移结果难以逼近地下的真实构造形态。
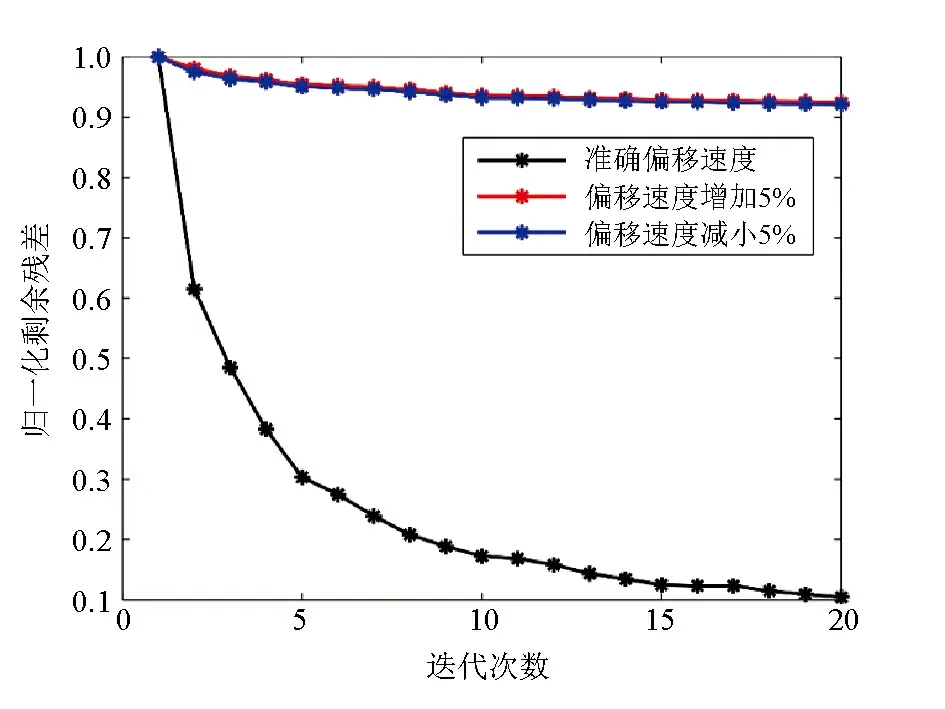
图5 不同偏移速度误差下归一化数据残差收敛曲线对比Fig.5 Comparison of normalization data residual convergence curves under different migration velocity errors
2.2.2 速度平滑的影响
偏移速度的平滑处理相当于对其进行滤波,常规的空间域平滑处理为简单平均法,即求取临近速度值的平均值,平滑效果与邻域的大小直接相关。本文采用二维高斯函数
(16)
进行速度的平滑处理,同时用平滑后的速度相对于真实速度的整体差异来衡量平滑程度,定义平滑后的速度的误差率e:
(17)
其中,vture为真实的速度,vsmooth为平滑后的速度,nx,nz为二维速度模型的大小。
分别使用参数σ为2、5、10,利用式(16)对Marmousi模型速度进行平滑处理得到图6的速度模型,此时误差率e的值分别为2.7%、5.24%、7.28%。
分别利用不同平滑程度的偏移速度进行最小二乘逆时偏移,图7为不同偏移速度的迭代20次的最小二乘逆时偏移成像结果。通过成像结果的对比可知,对偏移速度进行较小的平滑处理之后,即e=2.7%时,最小二乘逆时偏移成像质量得到提高,剖面更加清晰。当e=5.24%时,在剖面的背斜及深部潜山处出现错误画弧同相轴。当e=7.28%时,在断层处,断面出现微弱的扭曲,在深部潜山错误画弧同相轴现象加剧。整体而言,偏移速度场进行较小的平滑处理,对最小二乘逆时偏移成像剖面质量影响不大;当速度平滑程度较大时,会产生错误的同相轴,将会对后续的构造解释,层位分析产生不利影响。图8为不同偏移速度的逆时偏移成像结果,可以发现较小的平滑处理时,即e=2.7%时,逆时偏移成像质量同样得到提高;在e=5.24%时,逆时偏移断层断面出现微弱扭曲现象,e=7.28%时,断层断面扭曲现象加剧,剖面中出现画弧现象;相比逆时偏移而言,最小二乘逆时偏移对平滑程度较大的速度误差更加敏感。
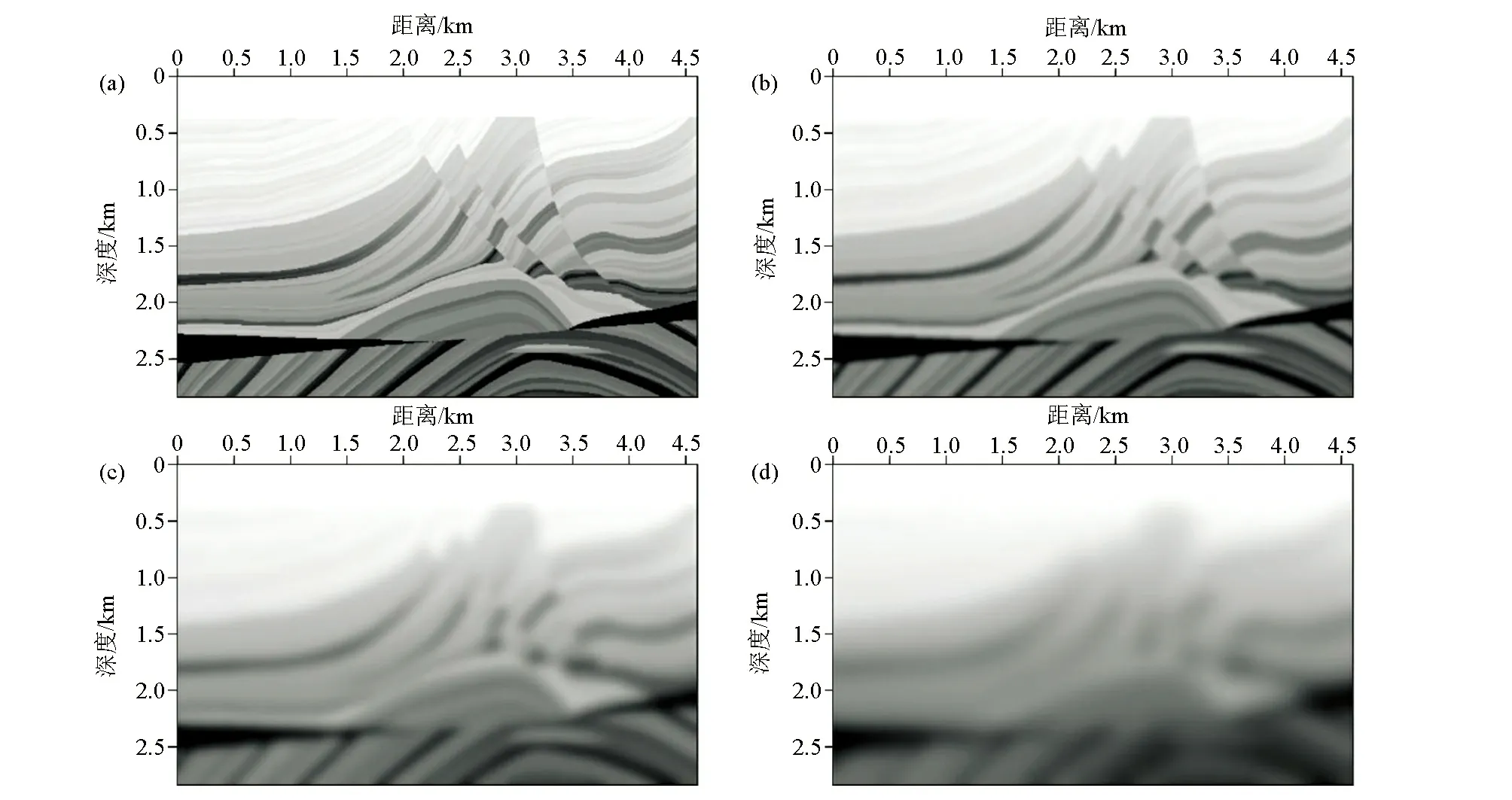
a—真实速度(e=0%);b—偏移速度模型1(e=2.7%);c—偏移速度模型2(e=5.24%);d—偏移速度模型3(e=7.28%)a—accurate speed(e=0%);b—migration velocity model 1(e=2.7%);c—migration velocity model 2(e=5.24%);d—migration velocity model 3(e=7.28%)图6 不同平滑程度的Marmousi模型Fig.6 Marmousi model with different smoothness
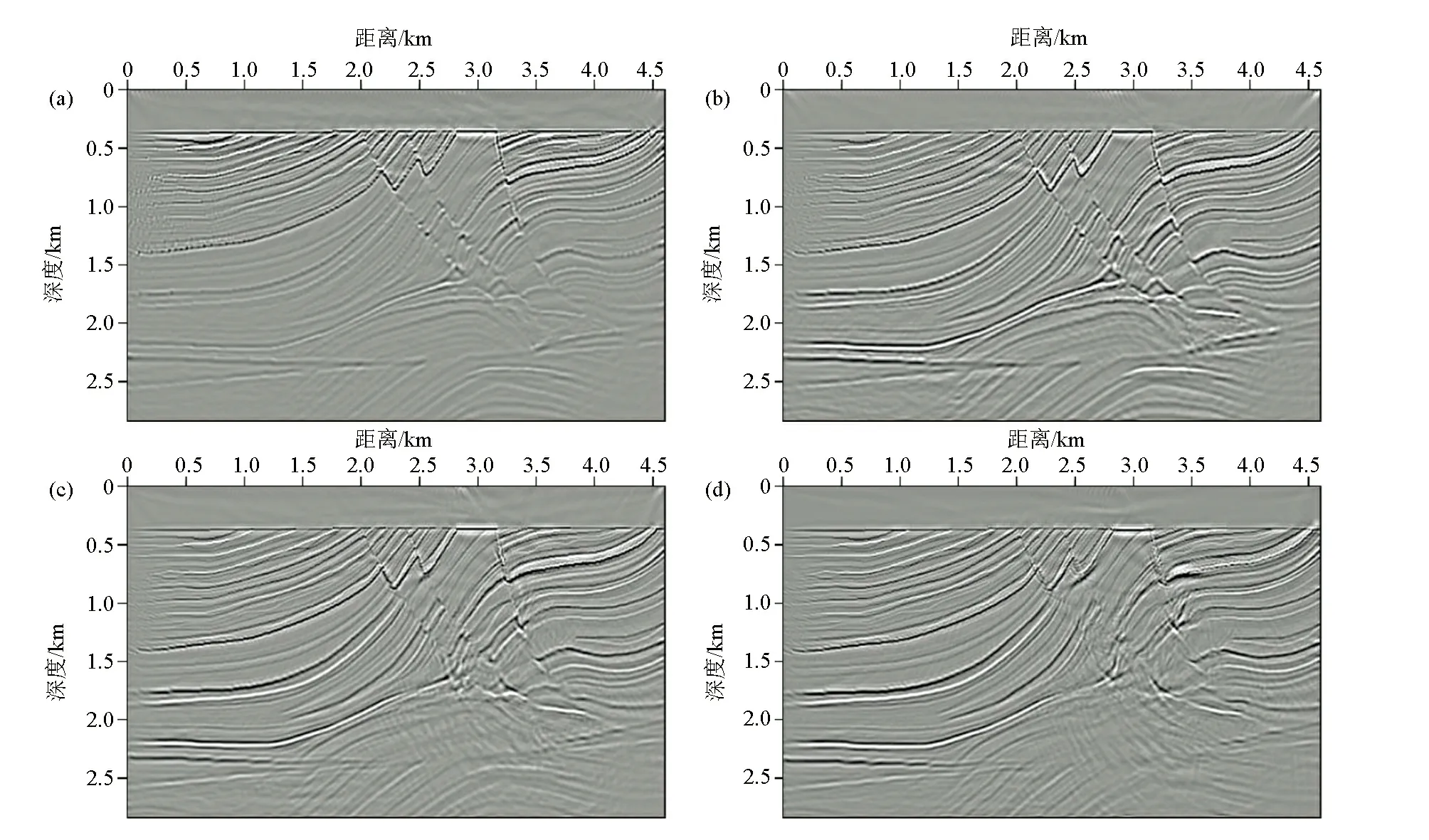
a—速度未做平滑;b—e=2.7%的平滑速度;c—e=5.24%的平滑速度;d—e=7.28%的平滑速度a—velocity without smoothness;b—e=2.7% smoothing speed;c—e=5.24% smoothing speed;d—e=7.28% smoothing speed图7 不同平滑程度的偏移速度最小二乘逆时偏移成像结果Fig.7 Least squares reverse-time migration imaging results with different smooth migration velocity
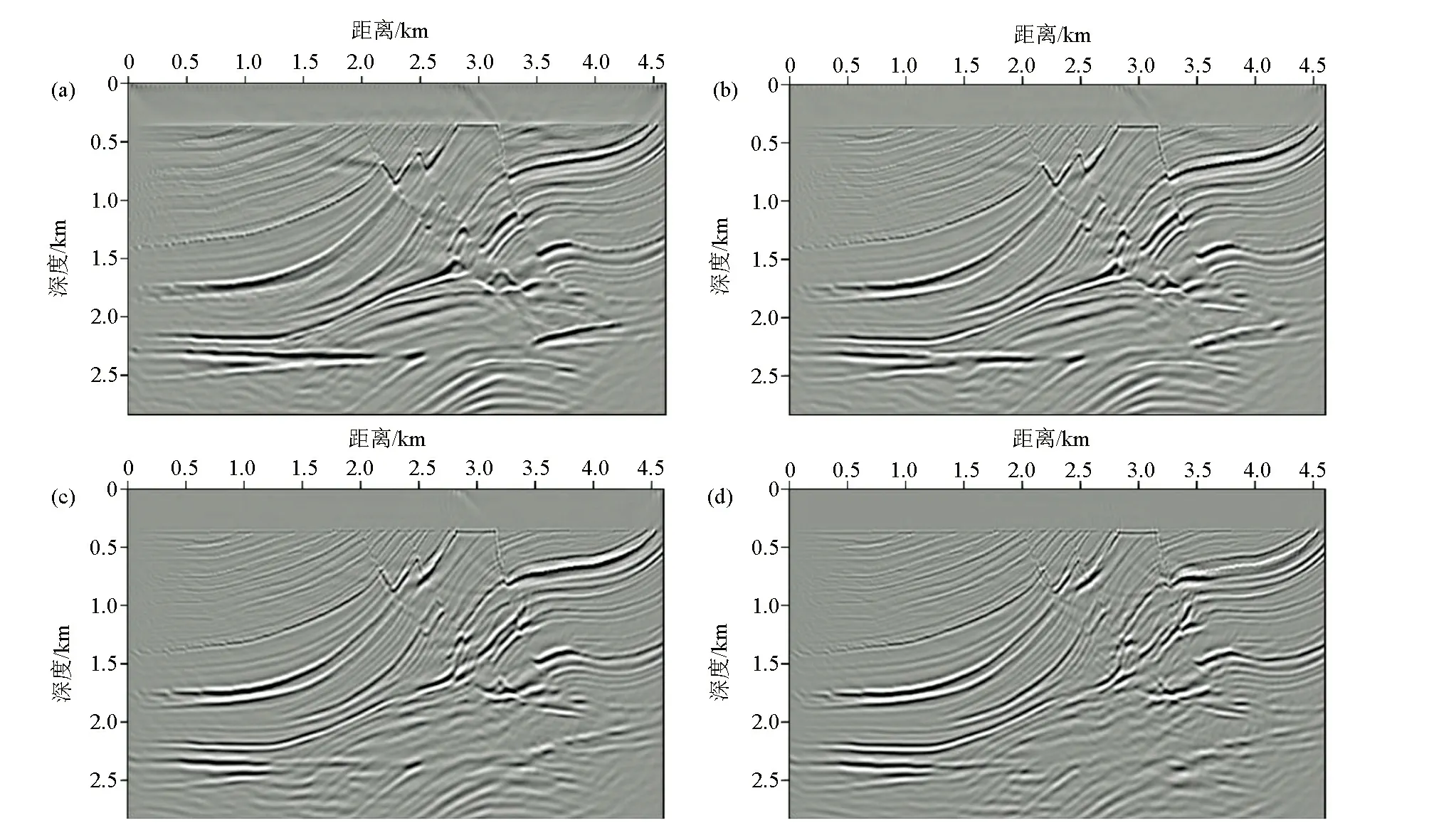
a—速度未做平滑;b—e=2.7%的平滑速度;c—e=5.24%的平滑速度;d—e=7.28%的平滑速度a—velocity without smoothness;b—e=2.7% smoothing speed;c—e=5.24% smoothing speed;d—e=7.28% smoothing speed图8 不同平滑程度的偏移速度逆时偏移成像结果Fig.8 Reverse time migration imaging results with different smooth migration velocity
图9为不同平滑程度的偏移速度进行偏移成像时,最小二乘逆时偏移迭代收敛的情况。可以看出:随着偏移速度平滑程度的增大,偏移结果的反偏移合成数据和原始地震记录之间的匹配程度也随之变差。由于速度平滑是速度的随机变化,速度场误差的数学期望值较小,因此平滑后的速度相比速度系统误差对最小二乘逆时偏移的影响小。
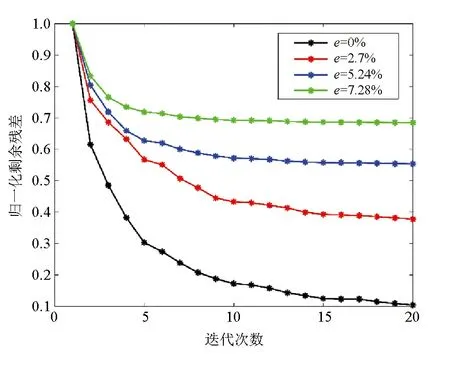
图9 不同平滑程度偏移速度下归一化数据残差收敛曲线对比Fig.9 Comparison of normalized data residuals convergence curves with different smooth migration velocity
2.3 随机噪声的影响
为与实际勘探过程中采集地震数据噪声规律相符,本文对炮集中的全部地震道加入随机噪声,其中随机噪声的构造步骤如下。
首先,针对炮记录生成区间[-1,1]的二维随机数:
noise[m,n]=rand[m,n] ,
(18)
其中m表示炮记录中单道样点数,n表示炮集中的道数。
然后,计算振幅均衡因子scale:
(19)
其中ns为信噪比,S为原始炮集信号中最大振幅,N为噪声noise的均方根振幅。
最后,输出信噪比为ns的含随机噪声的地震记录output:
output=signal+scale×noise ,
(20)
其中,signal为原始地震记录信号。
分别在地震记录加入信噪比为5和信噪比为1的随机噪声,图10为去除直达波之后加入随机噪声的地震记录。
图11为利用精确的偏移速度对上述地震记录进行最小二乘逆时偏移迭代20次得到的成像结果。当信噪比为5时,最小二乘逆时偏移仍然能够较好地压制噪声,噪声对偏移剖面影响不大。当信噪比是1时,偏移剖面受到极大的影响,只有强反射轴能够勉强辨认,成像结果较差。整体而言,当地震资料的信噪比较小时,随着噪声的增强,偏移剖面中的弱小反射被淹没在噪声之中,弱同相轴难以分辨,尤其是断层断面、深部潜山严重受噪声影响,难以反映地下构造形态。对比图12逆时偏移的成像结果可以发现,在信噪比为5时,逆时偏移和最小二乘逆时偏移成像品质都较高,抗噪能力相当。当信噪比为1时,可以发现逆时偏移的抗噪能力优于最小二乘逆时偏移,这是因为逆时偏移是利用双程波进行成像,减弱了噪声的影响。而最小二乘逆时偏移在进行迭代时,对偏移结果做反偏移与地震记录匹配计算误差泛函,地震噪声的存在,使得迭代时误差泛函难以收敛,因而噪声较大时,最小二乘偏移较逆时偏移更为敏感。
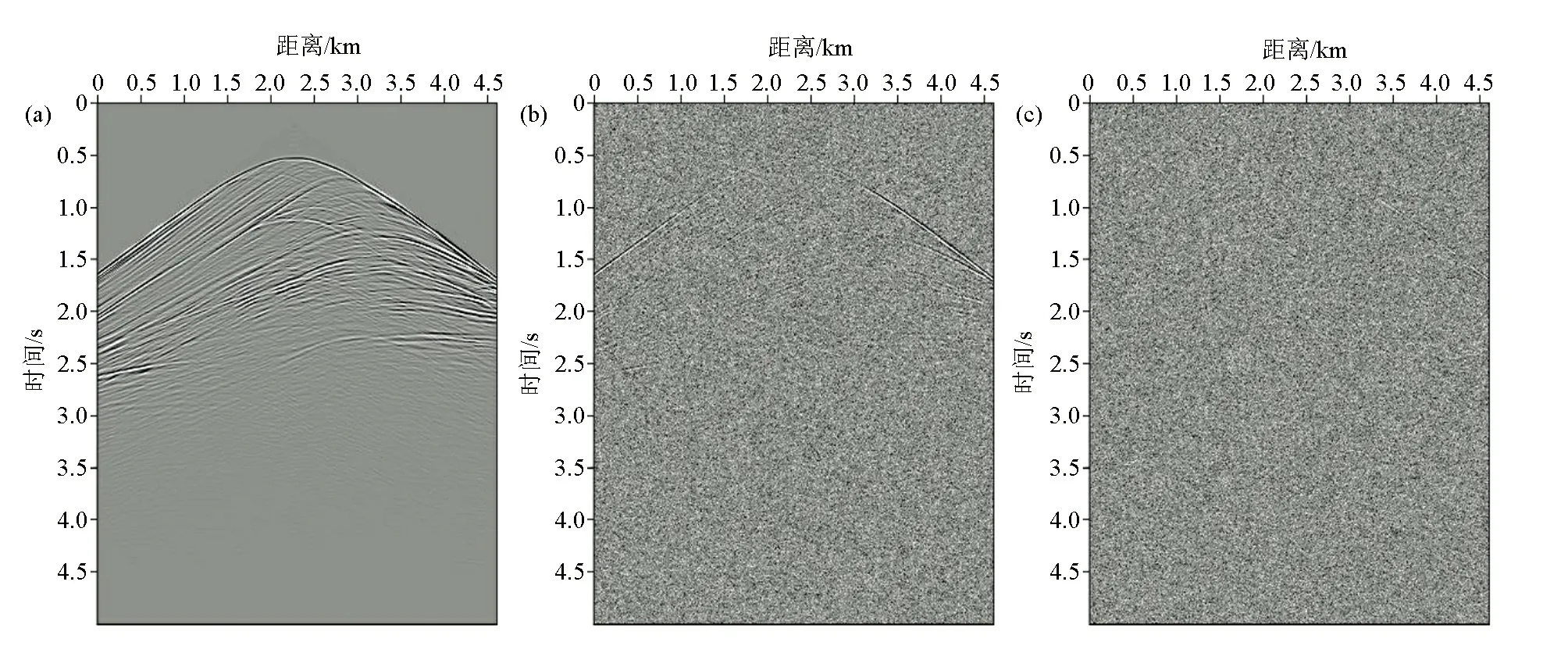
a—原始地震记录;b—ns=5的地震记录;c—ns=1的地震记录a—seismic record without noise;b—seismic records of ns=5;c—seismic records of ns=1图10 加入不同程度噪声的地震记录Fig.10 Seismic records with adding different degrees noise
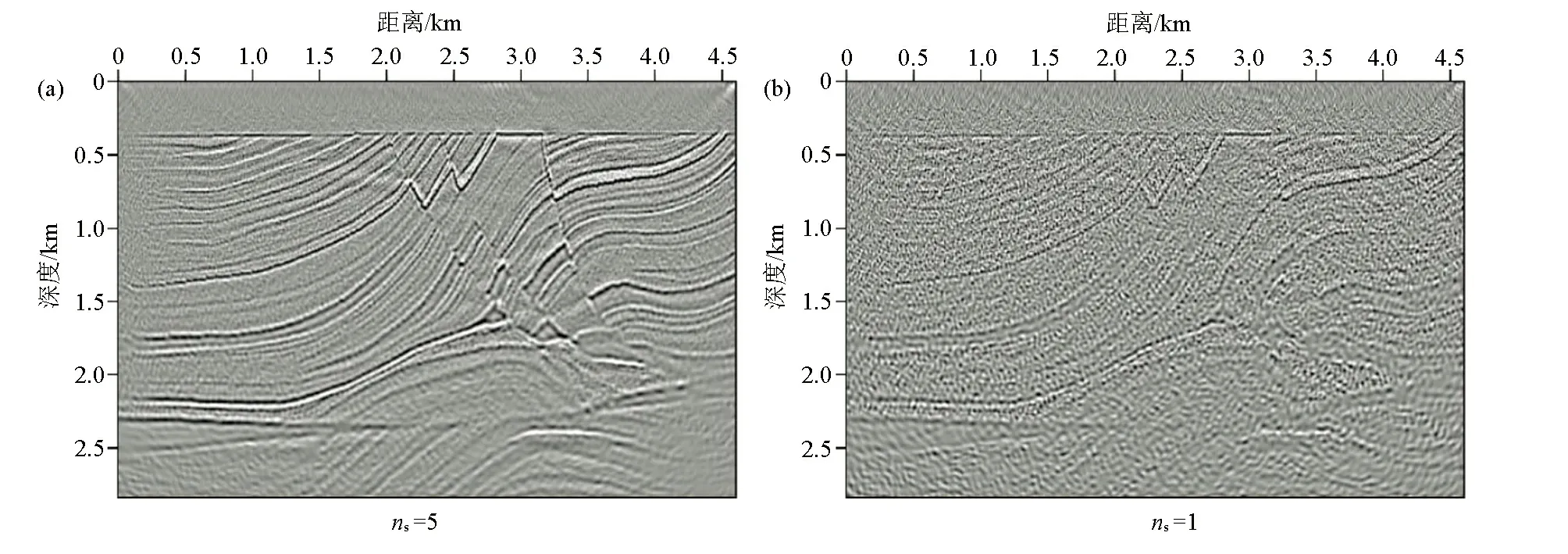
图11 不同含噪地震记录最小二乘逆时偏移成像结果Fig.11 Least squares reverse-time migration imaging results of different noisy seismic records

图12 不同含噪地震记录逆时偏移成像结果Fig.12 Reverse time migration imaging results of different noisy seismic records
3 结论与讨论
本文分析了速度误差和地震噪声对最小二乘逆时偏移成像的影响,基于Marmousi模型进行最小二乘逆时偏移及逆时偏移成像,针对实际资料处理中经常出现的偏移速度系统误差、速度平滑、地震资料噪声情况分别利用最小二乘逆时偏移进行了偏移成像,并且与其精确成像和对应逆时偏移结果进行了对比,得到了以下几点认识:
1)在偏移速度存在系统误差的情况下,最小二乘逆时偏移成像深度会出现误差,剖面中断点处绕射波无法收敛,影响断层的边界识别;剖面中深部出现杂乱、不连续的同相轴,形态失真,很难反映真实的构造形态;逆时偏移和最小二乘逆时偏移成像结果都受速度误差影响较大,两者都难以反映地下实际构造形态。相比速度系统减小的情况,偏移速度增大时引起的深度误差更大,而对构造形态影响相对较小。
2)适当的偏移速度平滑可以改善最小二乘逆时偏移剖面质量,一般来说,速度误差率e小于3%可以适当改善偏移剖面质量,大于3%后,则会影响成像品质,较大的平滑会产生错误的同相轴,相比逆时偏移而言,最小二乘逆时偏移对平滑程度较大的速度误差更加敏感。
3)最小二乘逆时偏移的成像质量会随着地震资料中噪声增加而变差,当地震资料的信噪比较小时,随着噪声的增强,偏移剖面中的弱小反射被淹没在噪声之中,弱同相轴难以分辨,尤其是断层断面、深部潜山严重受噪声影响,难以反映地下构造形态,在噪声较大时,最小二乘偏移较逆时偏移更为敏感。
通过本文分析,最小二乘逆时偏移的正确成像依赖精确的偏移速度,最小二乘逆时偏移及逆时偏移受速度系统误差影响较大,在实际资料的处理过程中,应尽量提高偏移速度的精度,同时可以对偏移速度进行适当的平滑,有利于最小二乘逆时偏移的成像质量;对地震数据进行最小二乘逆时偏移成像之前,应降低其背景噪声,从而减小其对成像剖面的影响。