基于磁杆直线电机的光学延迟线研究
2020-04-21茆亚洲
茆亚洲,邱 亮
(上海理工大学 光学信息与计算机工程学院,上海 200093)
引 言
太赫兹时域光谱技术是20世纪末发展起来的一种新型光谱技术[1],在生物医药检测、国防反恐安检等诸多领域具有较大的潜在应用价值。其基本原理是利用同一台激光器产生两束激光,一束进入发射天线辐射出太赫兹波,透过样品,另一束激光经过光学延迟[2]装置进入探测天线,从而得到经过样品的太赫兹波时域信号,之后进行频谱变换即可获得太赫兹光谱的幅值和相位信息[3]。其中,为了满足对太赫兹时域脉冲的实时测量,通常采用等效时间采样的方法[1],而要实现等效时间采样,必须解决三个技术问题:一是待测信号具有周期重复性;二是具有超短采样信号;三是具有对于待测信号能够发生相对位移或相移[4]的探测信号。其中前两者完美契合太赫兹波的探测需求,不需考虑,而第三个要求通常使用光学延迟线的移动来调整太赫兹脉冲与探测脉冲的相对延迟[5]。
就目前市面上的光学延迟线,最常用的有美国Moticont公司的音圈电机和美国高光科技的系列光学延迟装置等。其中音圈电机因其只能提供大约300 ps的延迟范围,并且光学延迟分辨率仅有约1.3 fs,应用受到诸多限制[6]。
而美国高光科技的系列延迟线,本文以最新款MDL002型为例进行说明,该装置采用德国 FAULHABER(冯哈伯)的微型直流电机1524T012S,通过螺纹间距为0.301 2 mm的丝杆构建动力传动系统,以达到角锥棱镜[7]在空间精确反复运动的目的。而该架构存在诸多弊端:一是微型直流电机采用直流驱动,扭矩小,动力不足,难以实现高加减速移动;二是编码器RIE2-5124811通过码盘刻度识别,与角锥棱镜的直线位置存在严重误差,同时该编码器将离散的位置信息反馈给主控板,系统在闭环控制中对位置环数据存在严重精度不足;三是控制要素缺失,在动力驱动系统中,完整的闭环链路有位置环[8-9]和速度环[10],而目前的架构只有精度严重不足的位置环数据,无法构建最基本的闭环控制环路[11]。上述原因直接导致该型号的延迟分辨率只有1 fs (0.3 μm的位置定位精度)。此外,美国高光科技MDL002型延迟线只支持简单的指令设置和控制,致使研究人员只能配合其工作,远远无法满足二次开发需求。并且该款延迟线最大支持连续工作时长仅为10 min。还有该款延迟线长时间使用之后,丝杆磨损和容易被灰尘异物卡死的问题,进一步增加了位置反馈精度误差。
为了解决上述问题,本文提出了一种采用型号为PM.SS1610磁杆直线电机作为动力驱动装置,同时装载光栅测量系统的延迟线改进方案。该方案的传动装置采用磁杆代替传统的螺纹丝杆,避免了因丝杆磨损而造成的反馈精度误差,同时可提供高达255 N的峰值推力和85 N的平均推力。方案还通过装载光栅测量系统,对延迟线形成位置环闭环控制。实现了长距离内可以高速精准往复运动,并提供高达512 ps的延时范围和0.033 fs的光学延迟分辨率。从根本上解决了传统和延迟线时间和延迟速度慢,光学延迟分辨率低等问题。
1 光学延迟线的改进方案
1.1 光学延迟基本原理
由等效采样原理[1]可知,想要获得完整的太赫兹时域脉冲信号,需要具有对待测信号能够发生相对位移或相移的采样信号,其中调整太赫兹脉冲信号与探测脉冲的相对时间延迟是通过光学延迟线的往复运动实现的。基本原理如图1所示,由飞秒激光器分出两束光分别是探测光和泵浦光,如图1(a)探测光沿着水平方向入射到可移动的两面互相垂直的角锥棱镜上,实现对探测光脉冲的光程调节。例如图中角锥棱镜移动距离时,相应光程差为,相应时间延迟为

式中:c为光速;n为光学延迟线背景环境的折射率。然而延迟线位置的准确性会影响后续探测的采样时间,从而导致探测到的单周期太赫兹时域脉冲信号在振幅上存在误差,具体分析如下:当延迟线位于位置时,如果其偏移,则探测系统的采样时间,即时间延迟将偏移[12]
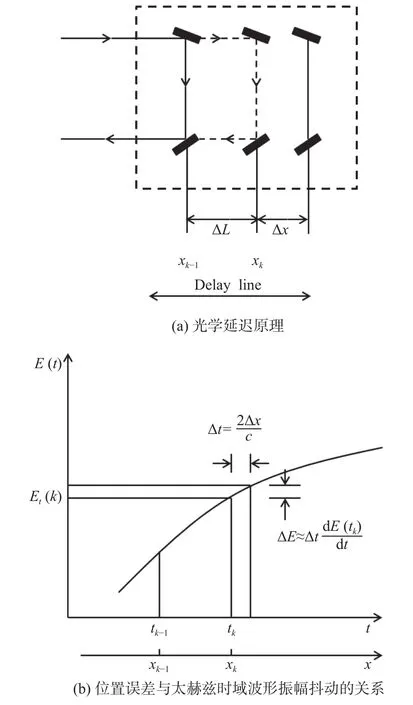
图1 延迟线与时域信号Fig. 1 Delay line and time-domain signal

由此可得到时间延迟的方差[12]


式中 tk=kτ ,为采样间隔。测试信号的振幅的方差可表示为

由此得出,光学延迟线引起的位置误差,会导致单周期太赫兹时域脉冲波形振幅产生抖动,从而严重影响信号的稳定性。
1.2 改进方案设计
如上所述,在太赫兹时域光谱系统中,光学延迟线的性能指标极大影响着对太赫兹脉冲信号的质量,针对传统光学延迟线存在的诸多问题,我们对延迟线的驱动方式和位置控制进行了改进,改进后的结构如图2所示,具体方案如下。
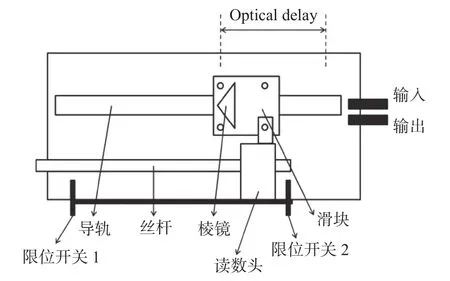
图2 光学延迟线内部结构Fig. 2 Internal structure of optical delay line
我们采用PM.SS1610磁杆直线电机作为动力驱动装置,该电机体积小,动力足,其核心是采用磁杆代替传统的螺纹丝杆作为传动装置,可以提供高达255 N的峰值推力和85 N的平均推力,非常适合长距离内做高速循环往复运动。同时在延迟线上装载光栅测量系统,通过光栅读头识别角锥棱镜的绝对位置,再通过配套的电机驱动器搭建对延迟线的位置环和速度环的闭环回路控制系统,实现更加科学合理的PID[11]控制。从而实现了长距离内高速精准往复运动,并提供高达512 ps的延时范围和0.01 μm的位置控制精度(0.033 fs的光学延迟分辨率)。此外,针对美国高光科技MDL002延迟线不支持二次开发和不能长时间连续工作的缺点,本方案选用copley的ACJ-055-18电机驱动器,支持底层程序的自主开发,可以根据不同的应用场景随时修改控制逻辑。同时将电机的传动装置和负载通过磁耦合,在空间上严格不接触,从而降低电机运行过程中因为摩擦导致的发热,经过前期测试,可实现168 h连续工作。
1.3 改进方案的性能测试及分析
设置电机的延时扫描范围为10 mm(对应光学延迟为67 ps,理论上对应250 000个脉冲,即一个脉冲对应0.04 μm),速度为10 mm/s。我们使用金思拓逻辑分析仪测量光栅尺的输出脉冲,设置逻辑分析仪的采样率为1 GHz,采样深度为20 MHz,即测量50个行程数据。选取其中任一个行程的数据,如图3所示,从逻辑分析仪的上位机直接读取A、B两相信号的脉冲个数为249 961,由于测量原因存在个别误差,可忽略不计,与理论脉冲个数吻合。在后期数据采集过程中,我们将Z相脉冲位置(即零点)作为电机的绝对开始位置,再通过对A、B相信号的正交解码(分辨率提高四倍)更精确的反馈电机的实时位置信息,最终实现高达0.01 μm的位置控制精度,即0.033 fs的时间延迟分辨率。
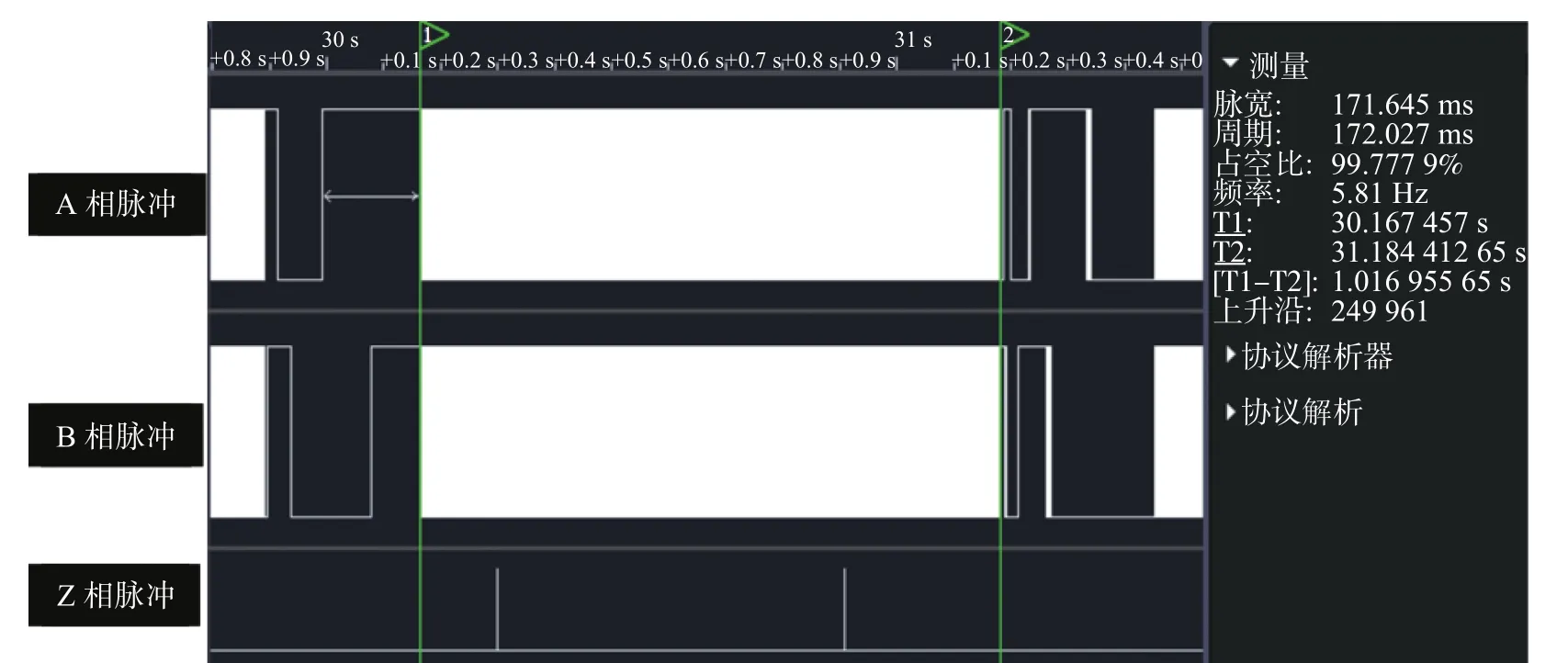
图3 定位精度(时间延迟分辨率)测试Fig. 3 Positioning accuracy(time delay resolution)test
2 改进方案的延迟线与 MDL002 型对比测试
在同等测试条件下,将本文改进的光学延迟线与美国高光科技MDL002延迟线分别应用于太赫兹波谱系统中,波谱系统框图如图4所示,其工作过程如下:同一台激光器产生两束激光,其中一束泵浦光进入发射天线(图4 Emitter)向空间辐射太赫兹波,另一束探测光经过光学延迟装置,通过光学延迟线控制太赫兹脉冲和探测光脉冲之间的时间延迟,再进入探测天线(图4 Receiver),从而得到完整的太赫兹时域脉冲。

图4 全光纤式太赫兹时域波谱系统框图Fig. 4 Block diagram of all-fiber terahertz time-domain spectroscopy system
在测试中,我们先后更换了本文改进的光学延迟线和美国高光科技MDL002延迟线用来对比性能,故对两台延迟线设置了相同的参数,即光学延迟范围67 ps(对应10 mm),速度67 ps/s(对应10 mm/s)等。测试结果如图5所示,其中图(a)、图(c)分别是MDL002延迟线和本文改进的延迟线10组单周期太赫兹时域波形叠加的结果。从图中可以看出,两台延迟线都能提供时间延迟获取太赫兹信号,但在细节方面,尤其是在波形最大值附近的局部区域,本文改进的延迟线获取的单周期太赫兹信号波形在时间轴上的抖动和振幅上的抖动明显小于MDL002延迟线。同样的结论也可以从图(b)和图(d)中定量的得出,MDL002型延迟线的振幅抖动量大约是本文改进延迟的延迟线一倍。从而说明了本文改进的延迟线比MDL002延迟线具有更小的位置定位误差,实现了提高延迟线光学延迟精度的目的,显著降低了由于延迟线定位精度不足导致的太赫兹时域波形振幅的抖动。
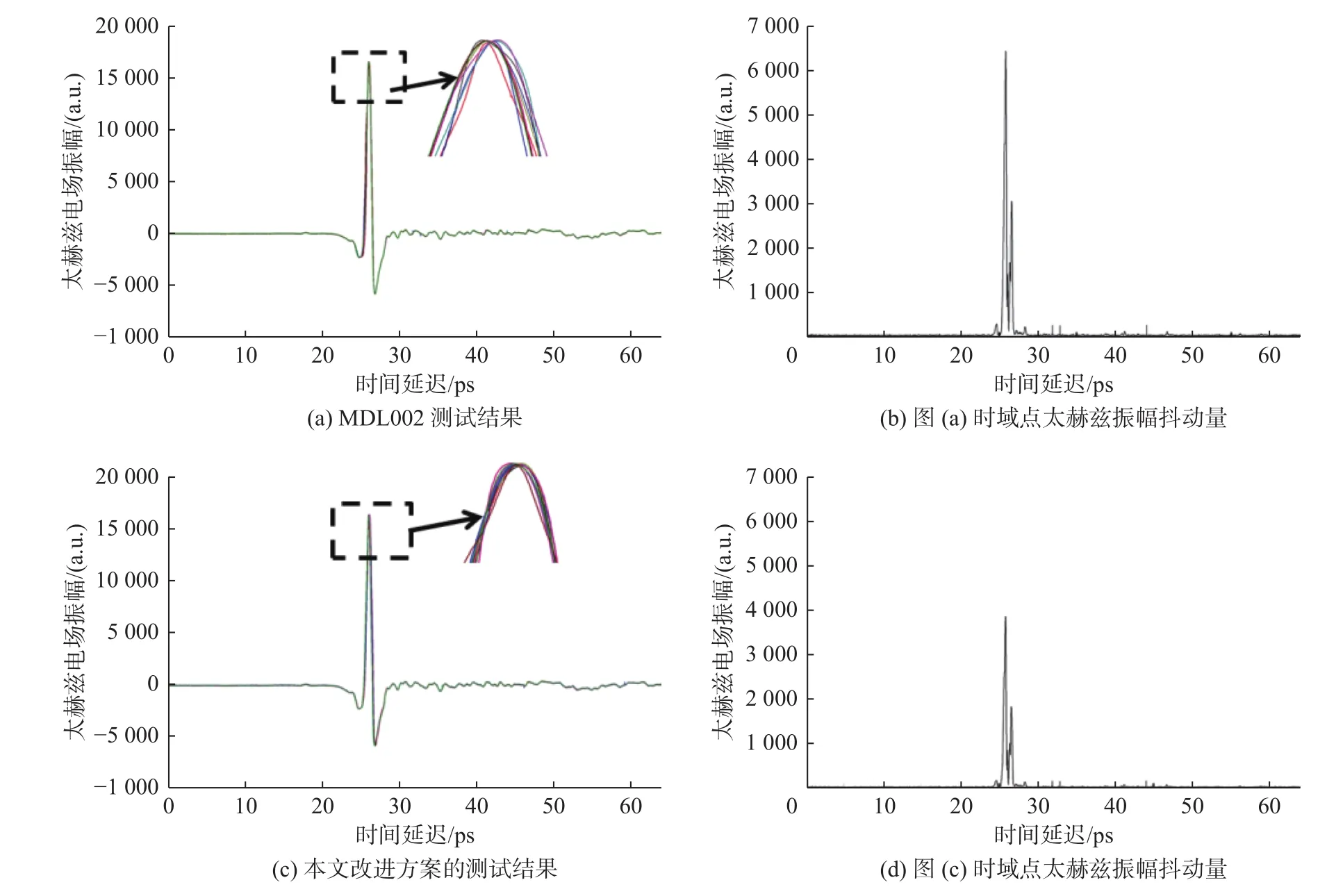
图5 实测数据对比Fig. 5 Measured data comparison
3 结 论
本文以美国高光科技MDL002型光学延迟线为例,分析了市面上常用的光学延迟线采用丝杆直线电机导致时间延迟速度慢、延迟精度低等问题。我们提出了使用磁杆直线电机代替丝杆电机并加装光栅系统的改进方案。测试结果表明,本文的改进方案有效解决了光学延迟线时间延迟慢、光学延迟精度低等问题,实现了长距离内可以高速精准往复运动,并提供高达512 ps的延时范围和0.033 fs的时间延迟分辨率,提高了太赫兹时域波形振幅的一致性。这对于设计更高速,位置分辨更精密的光学延迟线具有非常重要的实际工程意义。