基于DSP的PID控制算法的研究
2020-04-20寇洁
寇洁


摘要:随着计算机和信息技术的不断进步,数字信号处理器(DSP)技术得以飞速发展,DSP凭借其高效的实时性使得其在数据信号处理方面应用有着广泛的。PID控制算法要求控制器具有快速运算、快速响应的能力,单片机在这方面处理能力远不如DSP。本文将PID控制算法和DSP技术相结合,详细阐述了基于DSP的PID控制算法,为PID控制算法在实际工程中的应用奠定了基础。
Abstract: With the continuous advancement of computers and information technology, digital signal processor (DSP) technology has been developing rapidly. With its efficient real-time nature, DSP has a wide range of applications in data signal processing. The PID control algorithm requires the controller to have fast computing and fast response capabilities, and the processing capability of the single-chip microcomputer is far inferior to that of the DSP. This paper combines PID control algorithm with DSP technology, expounds the PID control algorithm based on DSP in detail, and lays the foundation for the application of PID control algorithm in practical engineering.
关键词:DSP;PID;控制算法
0 引言
比例、积分、微分控制,又称PID控制[1],PID控制凭借其稳定性好、可靠性好、结构简单、使用方便等优点广泛应用于实际工程中。PID控制可解决实际控制系统中往往无法获取被控对象结构、参数或系统的数学模型这一问题。即当我们不完全了解控制系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制器的原理就是根据系统的误差,合理选择比例、积分、微分参数,计算出控制量并进行控制[2]。随着计算机和信息技术的不断发展,DSP技术得以飞速发展,其具有强大的数据处理能力和高速运行速度,较高的品质和抗干扰性能,DSP可实现模拟处理不能实现的功能。目前DSP技术已广泛应用于各工程领域,在各行各业都具有很广的应用前景[3]。
因此将PID控制算法和DSP相结合,实现基于DSP的PID控制算法的研究具有非常重要的意义。
1 PID 控制算法
1.1 PID控制算法的基本概念
PID控制系统结构组成如图1所示。
其中,r(t)为PID控制期望值值,u(t)为PID控制输出值,c(t)为系统反馈值,e(t)为系统偏差值,e(t)=r(t)-u(t)。
比例控制,即P,其输出为e(t)乘以一个常数。
积分控制,即I,其输出为对e(t)进行积分运算。
微分控制,即D,其输出为e(t)进行微分运算。
从图1可以看出,PID控制算法实际上是将期望值与测量反馈值进行比较,得到的偏差经过P、I、D這些控制环节形成控制量,对控制对象进行控制。
1.2 模拟PID控制算法
在模拟控制系统中,控制器最常用的控制规律为模拟PID控制,模拟PID控制规律的表达式如下式所示:
其中kp为比例环节系数;Ti为积分时间常数;Td为微分时间常数;具体说明如下式所示:
1.3 数字PID控制算法
计算机只能处理离散量,不能对系统进行连续控制,由于这一特点实际工程中需要对模拟PID控制算法进行离散化处理,形成数字PID 控制算法,具体如下式所示:
2 基于DSP的PID控制算法
2.1 DSP简介
研究中系统微处理器采用TI公司的高性能32位浮点DSP:TMS320C6713。其主频最高可达225MHz,提供每秒高达13.5亿万次浮点运算,每秒执行18.00亿指令。TMS320C6713芯片内核是Veloci TI结构,可在8个功能单元内同时处理8条32位指令。控制算法对算法的快速性要求较高,所选用TMS320C6713作为处理器,能够满足算法对数据处理的要求[5]。
系统的存储部分包括192K的片内RAM和64M的片外SDRAM。其中片内RAM地址范围为00000000-0002FFFF。DSP访问片外存储器必须通过EMIF,TMS320C6713将整个外部空间容量为64M分为4个空间CE0~CE3,每个CE空间彼此独立,可以进行不同的访问控制。
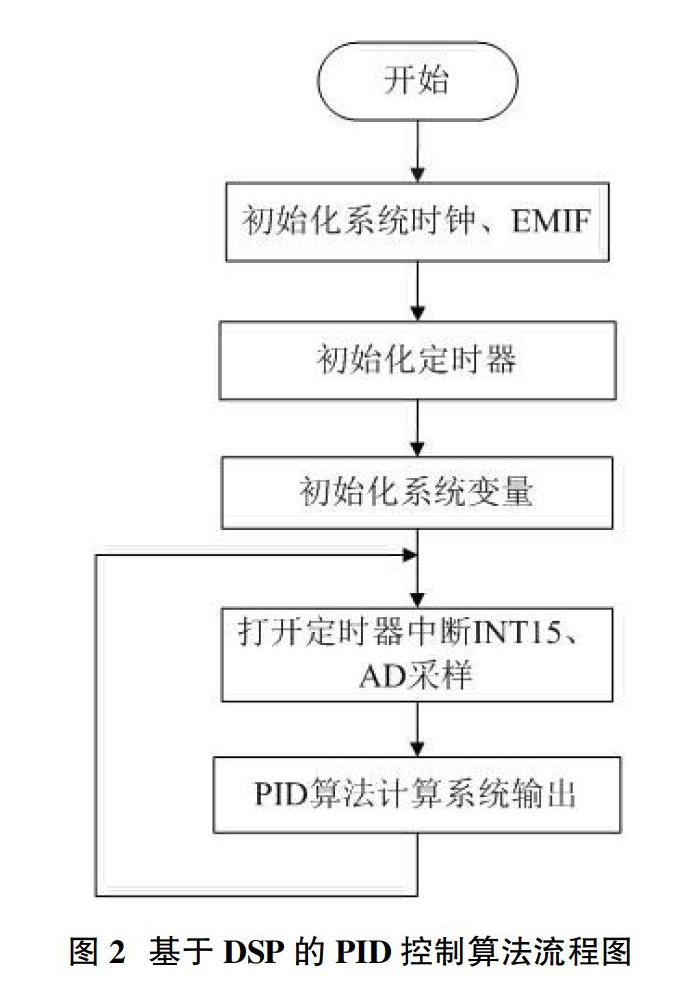
2.2 软件设计
系统软件程序流程图如图2所示,一次完整的PID控制算法流程图如图3所示[6][7]。
3 结论
本文将PID控制算法和DSP相结合,进行了基于DSP的PID控制算法研究,详细阐述了PID控制原理、基于DSP的PID控制算法软件设计。为PID算法在实际工程中的应用奠定了基础。
参考文献:
[1]唐玉红.PID控制方法研究[J].电子世界,2019(7).
[2]许传远,王东瑞,蔡宇.基于PLC的温度PID控制的研究与设计[J].山东工业技术,2009(14).
[3]张元元,程伟华,靳生梅.浅谈DSP技术的发展[J].网络财富,2010(16).
[4]李辉,史荣珍.PID控制器参数整定与分析[J].电脑知识与技术,2019(15).
[5]王鹏,简秦勤,范俊锋.基于TMS320C6000 DSP及DSP/BIOS系统的Flash引导自启动设计[J].电子元器件应用,2012(14).
[6]卢建洲.闭环控制系统中PID控制器的实现[J]. 电工技术,2006(9).
[7]王锁,时培成,徐增伟.基于DSP的双直流电机控制系统设计[J].河北科技大学学报,2017(38).