基于EHB的无人驾驶线控制动改装方案
2020-04-20曹明星

摘 要:无人驾驶汽车需要解决三个问题,即环境感知及实时定位,计算分析以及路径规划,最后还有就是控制执行。其中控制执行也就是汽车通过感知周围环境并结合路径规划后,实现车辆主控制功能,线控执行主要包括线控制动、转向和油门,而线控制动时最难的部分。目前发展中的汽车线控制动系统主要有两种类型,即电子液压式线控制动系统和电子机械式线控制动系统电子液压式线控制动系统是电子系统和液压系统相结合的产物,电子系统提供柔性控制,液压系统提供制动促动力,是从传统制动系统到电子制动系统的过渡传统tire1如博世开发的Ibooster,日产开发的EACT,大陸开发的MKC1等均已实现线控制动功能。但博世对国内厂家一般只开放ACC和ESP量产接口协议,刹车力度最大大约为0.5 g,标准的刹车力度在0.8g以上,0.5g是远远不够用。因此要实现无人驾驶车辆的线控制动功能,需另辟蹊径。EHB与ABS相结合是实现线控制动的方法之一。
关键词:无人驾驶;线控制动;EHB
1 制动系统简介
汽车制动系统是指对汽车某些部分(主要是车轮)施加一定的力,从而对其进行一定程度的强制制动的一系列专门装置。制动系统作用是:使行驶中的汽车按照驾驶员的要求进行强制减速甚至停车;使已停驶的汽车在各种道路条件下(包括在坡道上)稳定驻车;使下坡行驶的汽车速度保持稳定。
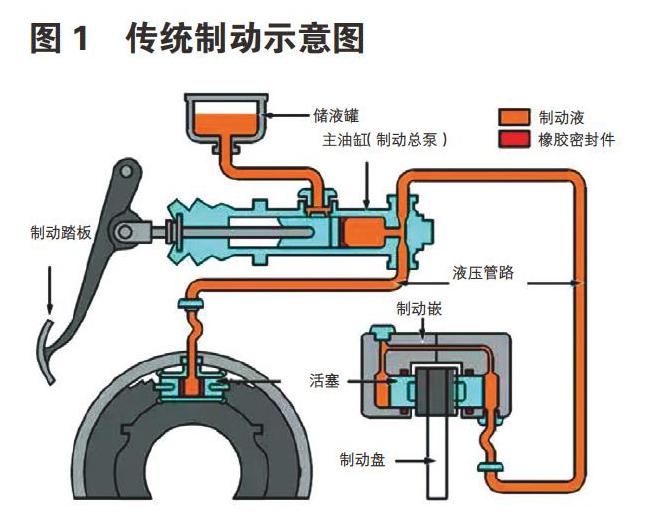
传统制动系统主要制动踏板、刹车液、制动总泵、制动油管、制动分泵、制动器(碟刹和鼓刹)等组成。刹车过程中,脚踩刹车踏板会驱动制动总泵将刹车油向制动分泵,制动分泵再作用于刹车片/刹车碟或鼓刹,迫使车轮转速降低,达到制动效果。[1]
2002年年初,在底特律举行的北美国际车展上,美国通用汽车公司推出了一款名叫Autonomy(自主魔力)的双座概念跑车,是世界上同时采用燃料电池技术和线控技术的第一辆汽车,驾驶员无需通过油门踏板和制动踏板进行驾驶操作,仅通过一个被称为“X-Drive” 的引导操作系统就可以完成一系列复杂的驾驶过程。奔驰公司新推出的SL500,是世界上第一辆采用线控制动技术的量产车,SL500的线控制动技术是采用由博世公司提供的电子液压式制动系统EHB,博世将其称之为电子感应控制制动系统(Sensortronic Brake Control),简称SBC。该系统最早由博世公司提出,是世界上第一套完全线控的制动系统(图1)。
2 线控制动系统设计方案
2.1 线控制动方案
本文所提及的线控制动改装是依托我司基于某款新能源汽车基础上开发的自动驾驶汽车,在车辆实施改装前,相关的控制协议均已开放。其改装方案为在原车制动系统基础上,增加EHB泵和EHB控制器。EHB控制器用于接收BVCU制动指令,根据EHB泵上的压力传感器反馈,控制EHB泵进行动作,制动车辆。
EBH单元(逻辑上EHB和制动踏板-EVP是并联,油路上EHB和制动踏板-EVP是串联),保证制动踏板制动有效的同时提供线控制动功能。EHB单元包括EHB执行单元和EHB-ECU控制单元。油路方面,串联EVP-EHB-ABS-制动轮缸,EVP和ABS在前机舱内部,同时考虑EHB和EHB-ECU的尺寸,采取靠近ABS安装的方式;空间方面,由于改制车辆空间不足,为保证EHB单元的顺利安装,需将原车雨刮喷水壶去掉;电路方面,EHB-ECU向CAN总线开放控制协议实现线控功能。软件方面主要是EHB-ECU对EHB的控制程序。
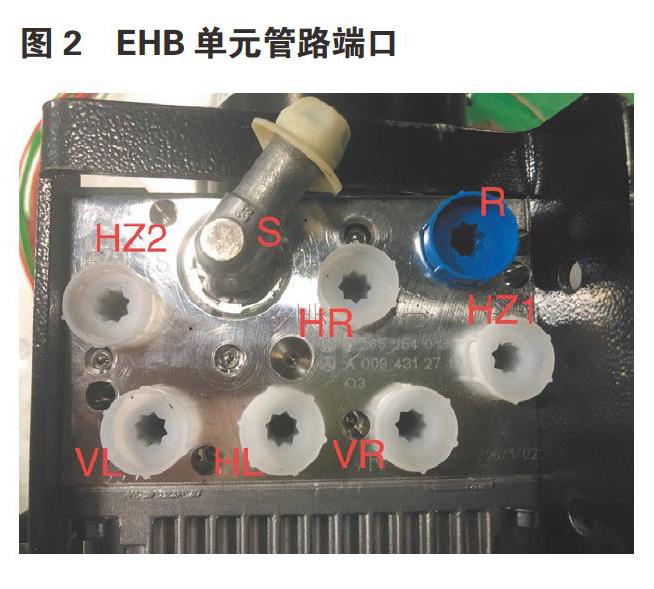
表1-1 EHB单元各端口名称及连极端,在原车自动系统中通过串联EHB单元实现踏板-EVP-EHB-ABS-轮缸的制动路线。本改装方案需手工制作7根高压油管,实现EHB与ABS的串联,管路具体链接路线如下:
1)原车制动总泵油管MC1通过对通及手工油管与EHB单元的HZ1口连接;
2)原车制动总泵油管MC2通过对通及手工油管与EHB单元的HZ2口连接;
3)EHB单元VL口通过两个三通实现安装压力传感器并分别连接ABS单元的MC1和MC2口;
4)EHB单元R口通过液压油管与原车储液器连接;
5)储液器输油管三通及液压软管实现分别与制动总泵及EHB单元S口连接;
6)EHB单元HR口安装压力传感器;
7)EHB单元HL口及VR口进行封闭处理;
8)将原车制动信号线以VCU信号线引出并连接至EHB控制器;
9)按设计方案连接EHB单元与控制器各线束后完成电路连接(图2)(图3);
2.2 注意事项
在实施改装过程中,手工制作高压油管及连接管路时需注意以下:
1)在制作高压油管时,油管扩口前必须将油管端面切平,保证与轴线垂直,并去除毛刺;
2)在手工制作高压油管时采用人工空间校核,油管的走向需满足EHB单元与ABS单元的正常装配,避免二次调整油管喇叭口与安装口的位置误差;
3)手工油管与三通或对通装配时,要保证油管喇叭口与对接锥面同轴线,避免歪斜;
4)油管与ABS单元或EHB单元装配时,螺母的拧紧扭矩要适当,力矩范围为21-24N·m;
5)在拆除原车高压油管前需在车底铺垫纸板等防止制动液污染地面,同时在管路接口下方防止塑料容器回收制动液;
6)EHB单元R口的回油管通过在原车储液器盖打孔方式回油,因此开孔的壶盖需要密封好,防止异物进入储液器,并经常检查制动液储量;
7)管路改制完成后续补充制动液,排出EHB单元中的空气(图4);
3 线控制动功能测试
选择一段平直的道路,车辆上电后,置于空挡,同时按下控制面板上的使能按键和纵向按键3S松开,启动纵向控制功能,此时纵向按键指示灯点亮,然后同时按下控制面板上的使能按键和自动按键3S松开,启动自动驾驶功能,此时自动按键指示灯点亮,最后通过AUTOCAN工具发送目标挡位、目标加速请求量、目标制动请求量及目标行驶状态指令信号,制动测试结果如下所示:
1)D挡_制动压力1Mpa
2)R挡_制动压力1Mpa
3)D挡_制动压力1.5Mpa
4)D挡_制动压力2Mpa
5)D挡_制动压力2.5Mpa
6)D挡_制动压力3Mpa
7)D挡_制动压力3.5Mpa
8)D挡_制动压力4Mpa
9)D挡_制动压力4.5Mpa
从以上图中可以看到,车辆在收到制动指令后从开始建压到达到预定压力的时间基本保持在100ms以内,且保压期间内制动压力无明显异常波动。车速从20km/h到停止的速度曲线图基本为线性的减速表现,满足舒适性要求。
4 结语
本文所采用的线控制动改装方案为车辆后装的自动驾驶改装方案,其制动基本性能满足设计需求。但在改装实施过程中的人为因素导致在EHB单元与ABS单元装配时会产生装配误差,以及手工制作的油管存在无固定及尺寸误差等缺陷。但通过车辆实际制动功能测试,车辆的制动建压时间,保压性能以及车辆减速舒适性的均满足设计要求,从而此方案可作为自动驾驶车辆改装中线控制动系统的设计方案。
参考文献:
[1]方泳龙,李礽,李幼德.汽车制动系设计专家系统[J].汽车工程,1995(3):129-136.
作者简介
曹明星:(1987.08—),男,汉族,硕士,毕业于英国谢菲尔德大学,现就职于北京新能源汽车技术创新中心有限公司,从事智能网联汽车仿真场景测试技术相关研究工作。
