基于随机自适应方法的多传感器融合算法
2020-04-19王颖超
王 茜 王颖超 曹 菲
1(河北美术学院公共课部 河北 石家庄 050700)2(西安电子科技大学 陕西 西安 710077)
0 引 言
多传感器系统的主要目标是通过一致和协同的方法将来自多种传感器的信息结合起来得到一个特定变量在某种环境下更可靠、准确、一致的描述[1-3]。在数据融合的过程中主要涉及几个关键问题,包括数据关联、传感器不确定性以及多源信息的管理。对于传感器测量的不确定性问题,不仅来自于测量的不精确和噪声,还包括在环境中出现的模糊性和不一致性引起的不确定性。数据融合技术能够对这些不确定性进行建模,并将多种类型的信息进行融合,得到一个更加可靠、更加准确的结果。
国外对信息融合技术的研究起步较早,其中美国起步最早,发展也最快。20世纪70年代美国康涅狄格大学著名系统科学家Y.Bar-Shalom教授最先提出了概率数据互联滤波器的概念,这就是信息融合的雏形。1973年,美国研究机构在国防部的资助下,开展了声纳信号理解系统的研究,推动了信息融合理论和方法的发展。自此,信息融合技术的应用引起了越来越多的重视,以军事应用为主的信息融合技术研究在全世界范围内迅速发展起来。20世纪70年代末,在公开出版的技术文献中开始出现多传感器信息融合的研究。1985年美国JDL下设的C3I技术委员会成立了信息融合专家组,专门组织和指导相关技术的研究。1988年,美国国防部把信息融合技术列为重点研究和开发的20项关键技术之一,且为最优先发展的A类。20世纪80年代以来,美国相继研究开发了基于信息融合技术的各种军用系统,这些系统后来不同程度地发挥了作用,特别是在海湾战争中对导弹拦截发挥了重要作用。迄今为止,世界上大多数国家都开展了信息融合技术的研究,并取得了大批的研究成果。
随着系统论、控制论和信息论等基础理论以及计算机技术、网络技术、通信技术和高效传感器技术等的快速发展,信息融合技术得到了前所未有的发展。1998年成立的国际信息融合学会每年都举办一次信息融合国际学术大会,系统地总结该领域的阶段性研究成果以及介绍该领域的最新进展。美国三军信息融合年会、SPIE传感器融合年会、国际机器人和自动化会刊以及IEEE的相关会议和会刊等每年也都进行相关技术的专门讨论。
国内关于信息融合技术的研究起步较晚,20世纪80年代初,国内开始从事多目标跟踪技术的研究,到了20世纪80年代末才开始出现有关多传感器信息融合技术的研究报道。进入20世纪90年代以来,这一领域在国内逐渐形成高潮。近年来信息融合技术在国内已发展成为多方关注的共性关键技术,在较为广泛的理论及应用研究的基础上,相继出现了一批多目标跟踪系统和具有初步综合能力的多传感器信息融合系统。
目前已有文献中有许多可用的技术用于传感器有效性的验证和不一致数据的识别,它们中的大部分都是针对特定的故障模式进行建模,然而要对所有的故障模式都进行建模并不现实。为了检测出数据的不一致,一般需要提供余度数据或者先验信息。有学者已经成功地利用Nadaraya-Waston估计器[4]和先验观测来验证传感器测量的有效性。此外,一些学者还提出了基于模型的卡尔曼滤波方法[5-7]、基于协方差的方法[8]、基于概率的方法[9]、基于模糊逻辑的方法[10-11]以及基于神经网络[12]的方法。这些方法有些依赖于模型,而另一些方法需要复杂的调参和训练过程。
传统的基于贝叶斯方法的信息融合技术,因其提供了一种将先验信息和当前实验得到的信息结合起来的良好的架构,因此被广泛应用,但是该方法不能够识别伪数据,因此在传感器测量值存在伪测量时融合结果不理想。针对这个问题,文献[13]结合了贝叶斯估计和熵理论,提出了一种基于后验概率熵的伪数据识别和信息融合方法,并通过仿真实验验证了所提方法的有效性。
1 基于贝叶斯方法的传感器融合
贝叶斯推理是一种基于贝叶斯理论的统计数据融合算法,得到测量或观测值Z后,根据条件概率或者后验概率估计n维状态向量X。观测值Z中包含的概率信息由概率密度函数p(Z|X)表示,即似然函数,也就是传感器的模型。似然函数表征后验概率密度可能发生变化的程度,一般通过离线试验或者可用信息确定。如果在得到测量信息之前,能够独立得到关于状态向量X的先验概率P(X=x),那么似然函数能够得到更准确的结果。根据贝叶斯理论,可以得到状态向量X的后验概率密度:
(1)
式中:P(Z=z)为传感器测量值为z的概率,只与测量值有关。因此,通过最大化后验概率密度(Maximum a posteriori,MAP),可以得到状态向量X的最大化后验概率估计:

(2)

(1) 在集中式融合方案中,所有传感器的信息同时进行融合,可通过式(3)使用贝叶斯方法融合来自n个传感器的数据:
p(Z=z1|X=x)p(Z=z2|X=x)…p(Z=zn|X=x)
(3)
(2) 分布式融合方案,采取分步逐级融合的策略,将上一次融合的结果作为下一次融合的先验信息。同样地,分布式贝叶斯方法可以通过下式实现信息的融合:
(4)
2 含有伪观测值的贝叶斯融合
由于传感器故障、受到外部干扰或者多径效应,传感器经常会输出伪数据。上文描述的贝叶斯方法不能够处理这些伪数据,因为该方法没有能够识别来自传感器的数据是否可用的机制。如果融合了这些伪数据将会得到不准确的估计结果。下面将推导考虑测量值不一致的基于贝叶斯方法的多源信息融合策略。
在构建传感器随机模型时,通常这些伪数据都会事先被识别并剔除。因此,通过实验得到的传感器模型只表征由于噪声引起的不确定性。假设事件si=0表示第i个传感器的数据是非伪数据,si=1表示第i个传感器的数据是伪数据,那么通过这个方法得到的传感器模型实际上表示分布p(Z=zi,|X=x,si=0)。根据贝叶斯理论,在真实状态x和测量值zi已知的条件下,传感器的测量值为非伪数据的概率密度为:
p(si=0|X=x,Z=zi)=
(5)
式中:P(si=0)为传感器i输出非伪值的概率,可根据实验确定。等式右部分母可通过遍历si的取值{0,1},累加化简,因此式(5)可重写为:
(6)
或:
(7)
将式(7)代入式(3)可得到集中式融合方案的后验概率分布:

(8)
比较式(8)和式(3)发现,分母中多出了p(si=0|X=x,Z=zi)这些项。这些项将改变相应传感器测量值协方差的大小,如果来自第i传感器的测量值具有较高的概率为伪数据,那么该传感器测量值的协方差将会变大,从而在融合时给予较小的权值,反之成立。
同理可得到分布式融合方案的后验概率分布:
(9)
式中:p(si=0|X=x,Z=zi)同样会影响传感器测量值的协方差。后验概率的协方差表征了根据测量值估计状态量的不确定度,方差越大表示估计不确定度越高,即估计的效果越不好;反之,估计方差越小不确定度越低,估计效果越好。而后验概率方差的增减可通过信息熵来衡量,信息熵表示变量的不确定度,大的信息熵表明不确定较大,因而信息量少。当融合一个新的可靠的测量值时,熵应该是减少的,否则可能是伪数据。因此文献[14]基于信息熵的增减提出了一种识别传感器伪数据的方法。
变量X的信息熵计算公式为:
(10)
式中:P(x)表示变量X=x的概率;E(·)表示对变量求期望。
对于连续的随机过程,将X的范围平分成宽度为δx的离散线段,那么概率密度函数将会形成一系列的直方图,x等于某个特定值的概率近似为p(x)δx,式(10)的离散化结果为:
(11)
对δx取极限δx→0,得到连续随机过程的熵:
(12)
因此,式(9)后验概率的熵为:
(13)
融合前后的熵增量为:
(14)
(15)
为了避免积分的运算,采用式(10)的离散化形式:
(16)
式中:p(x,z)为变量X、Z的联合概率密度。
同理得到:
(17)
由式(16)和式(17)得到互信息I(X:Z):
I(X:Z)=H(X)-H(X|Z)=
(18)
该值表征了融合后熵的减少量,即信息的增加量。取极限δx→0、δz→0,得到:
(19)
假设变量X、Z满足高斯分布,那么其联合分布也满足高斯分布。
(20)
(21)

(22)
根据式(22),如果融合后的方差大于融合前的方差,那么互信息I<0,表明融合后系统从测量值中得到关于状态量的信息量是减少的,因此该测量值可能是伪数据。反之,如果融合后的方差小于融合前的方差,那么互信息I>0,表明融合后系统从测量值中得到关于状态量的信息量是增加的,因此该测量值是正常值。
3 多高斯分布变量的贝叶斯融合
3.1 不考虑伪测量的贝叶斯融合(方法1)
如果不考虑传感器数据中的伪数据,N个模型由以下高斯似然函数给出:
(23)
式中:k=i表示第i个传感器。由贝叶斯原理可得到融合的最大后验估计为:
p(Z=z2|X=x)p(Z=z3|X=x)]
(24)
多个高斯分布进行融合,其后验概率分布为联合高斯分布,均值和方差分别为:
(25)
(26)
因此,如果没有可用的关于变量X先验信息用于估计,那么n个高斯分布的贝叶斯融合结果即为N个传感器数据按照标准差的加权平均。由式(26)可知融合后的分布标准差要小于N个独立分布任一分布的标准差,这表明通过融合估计结果的不确定性降低了。
3.2 考虑伪测量的贝叶斯融合
如果考虑传感器测量的伪数据,那么高斯传感器模型为:
(27)
在真实状态x和测量值zk给定的条件下,第k个传感器测量值为非伪数据的概率按照文献[13]给出:
(28)
选择这一函数的依据是:当测量值zk等于真实状态x时,该概率为1,随着测量值远离真实状态,该概率逐渐减小。参数ak依赖于模型参数以及该传感器的输出与其他传感器输出的偏差。
3.2.1集中式融合方案(方法2)
根据式(8)得到考虑伪测量值的集中式融合方案的后验分布为:
(29)
式(28)中的参数ak设为:
(30)
将式(30)代入式(29)得到:
(31)
参数bk满足:
(32)
满足式(32)可以确保式(31)仍然是高斯分布,因此只有一个峰值。由式(31)可知,如果某个测量值与其余测量值距离较大,就会增大该独立分布(表征从该测量值得到的置信)的方差。因此,如果两个测量值彼此很接近,那么分配给这些测量值的权值就会增加。
集中式融合方案的最大后验估计的均值和方差分别为:
(33)
(34)
3.2.2分布式融合方案(方法3)
在分布式或者序贯融合方案中,先融合两个传感器的测量值,然后将融合结果与第三个传感器的测量值进行融合,以此类推直到完成所有测量值的融合。根据式(35)融合第1个传感器和第2个传感器的信息:

(35)
将式(28)中的参数ak设为:
(36)
(37)
式中:m为测量偏差的最大期望值。代入式(35),得到:
(38)
根据第2节基于互信息的伪数据识别方法判断这两个测量值中是否存在伪数据。如果互信息大于0,表明这两个测量值都是正常的,其融合结果将与第3个测量值进行融合,融合结果将作为下一步融合的先验值。如果互信息小于0,则表明至少存在一个伪数据,进一步分别评估这两个传感器与第3个传感器的融合结果,如果两个组合中有一组的互信息是大于0而另一组小于0,则可确定只有一个伪数据且为互信息小于0那组中的测量值,正常测量值将和第3个测量值融合得到一个估计值;如果都小于0则表明至少存在两个伪观测值,且前两个必定为伪观测值,以此类推。
(39)
(40)
分布式融合方案的最大后验估计的均值和方差分别为:
(41)
(42)
4 仿真结果
为了验证本文所提出的方法能够识别传感器测量产生的随机伪数据,本文在仿真实验中首先比较了上述三种方法处理数据不一致问题的性能,其中方法1是简单的贝叶斯融合方法,没有考虑数据的不一致性,直接利用式(25)对三个测量值求加权平均。方法2和方法3都考虑了测量值的不一致性。其中:方法2采用集中式融合方案,利用式(33)根据测量值之间的差值动态调整各测量值的权重;而方法3采用分布式融合方案,根据互信息判断测量值是否为伪数据,如果是伪数据就将该测量值剔除,利用式(41)进行融合。然后将3种方法与基于协方差和基于置信准则的多传感器数据融合算法进行了比较。
仿真中模拟了三个高斯分布传感器的情形,各传感器性能参数如下:


真实状态值为:x=20。
产生仿真数据时,传感器1在98%时间工作正常,产生均值为20、方差为4的正态分布的数据,在2%的时间里产生均值为30、方差为4的正态分布的数据(伪测量值)。传感器2在90%时间工作正常,产生均值为20、方差为6.25的正态分布的数据,在10%的时间里产生均值为35、方差为6.25的正态分布的数据。传感器3在80%时间工作正常,产生均值为20、方差为9的正态分布的数据,在20%的时间里产生均值为38、方差为9的正态分布的数据。由于三个传感器中期望测量的最大值最小值分别为38和20,因此传感器测量值的最大期望偏差m=38-20=18。
图1(a)展示了三种传感器测量值基本一致的测试结果。由图1(a)可知,根据三种方法得到的后验概率分布得到相同的后验概率分布。这说明三种方法对于没有伪数据时的估计结果是相同。图1(b)-(d)展示了三个传感器中有一个传感器的测量值明显偏离其他两个测量值时的测试结果。从这三幅图中可以看出:方法1由于没有考虑伪观测值的影响,估计结果偏离真实值;方法2考虑了伪观测值的影响,给偏差较大的测量值赋予了较小的权值,得到的结果稍优于方法1;方法3识别并剔除了伪测量值,因此融合结果更接近真实值。
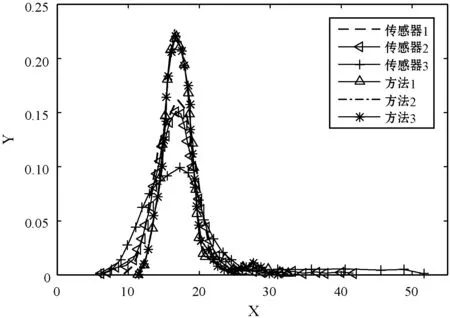
(a) 三个传感器数据一致的后验概率分布
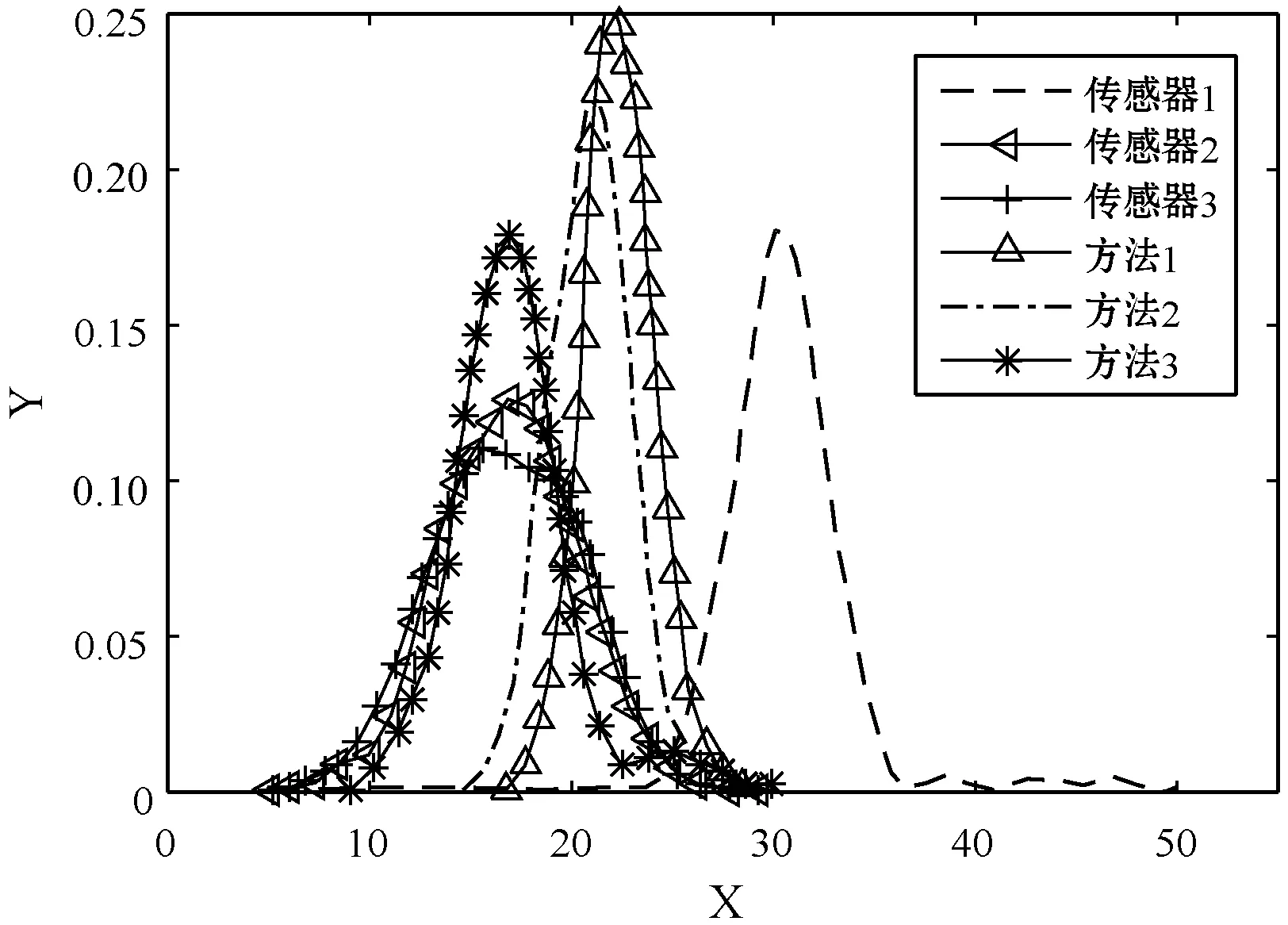
(b) 传感器1的测量数据偏离真值的后验概率分布
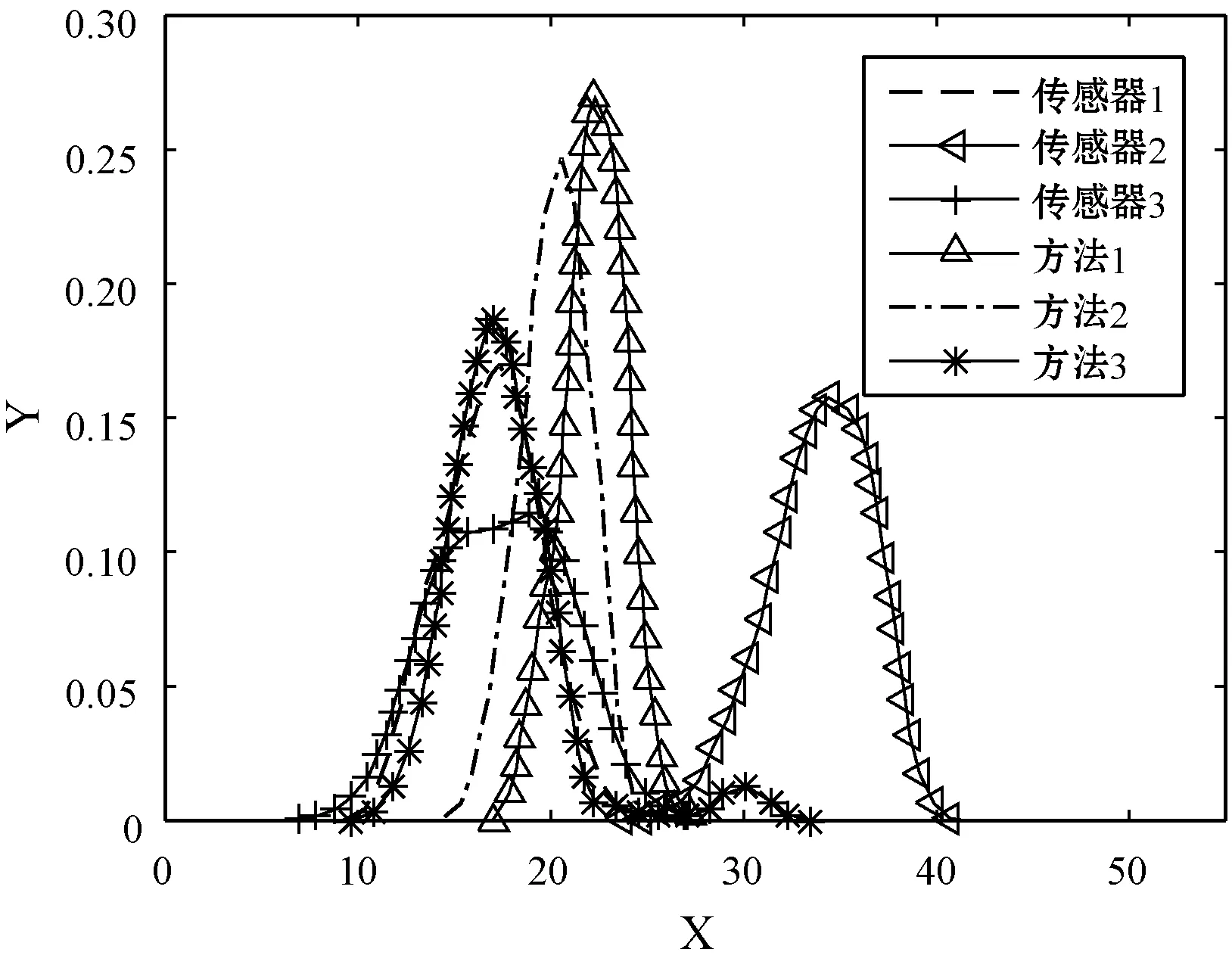
(c) 传感器2的测量数据偏离真值的后验概率分布
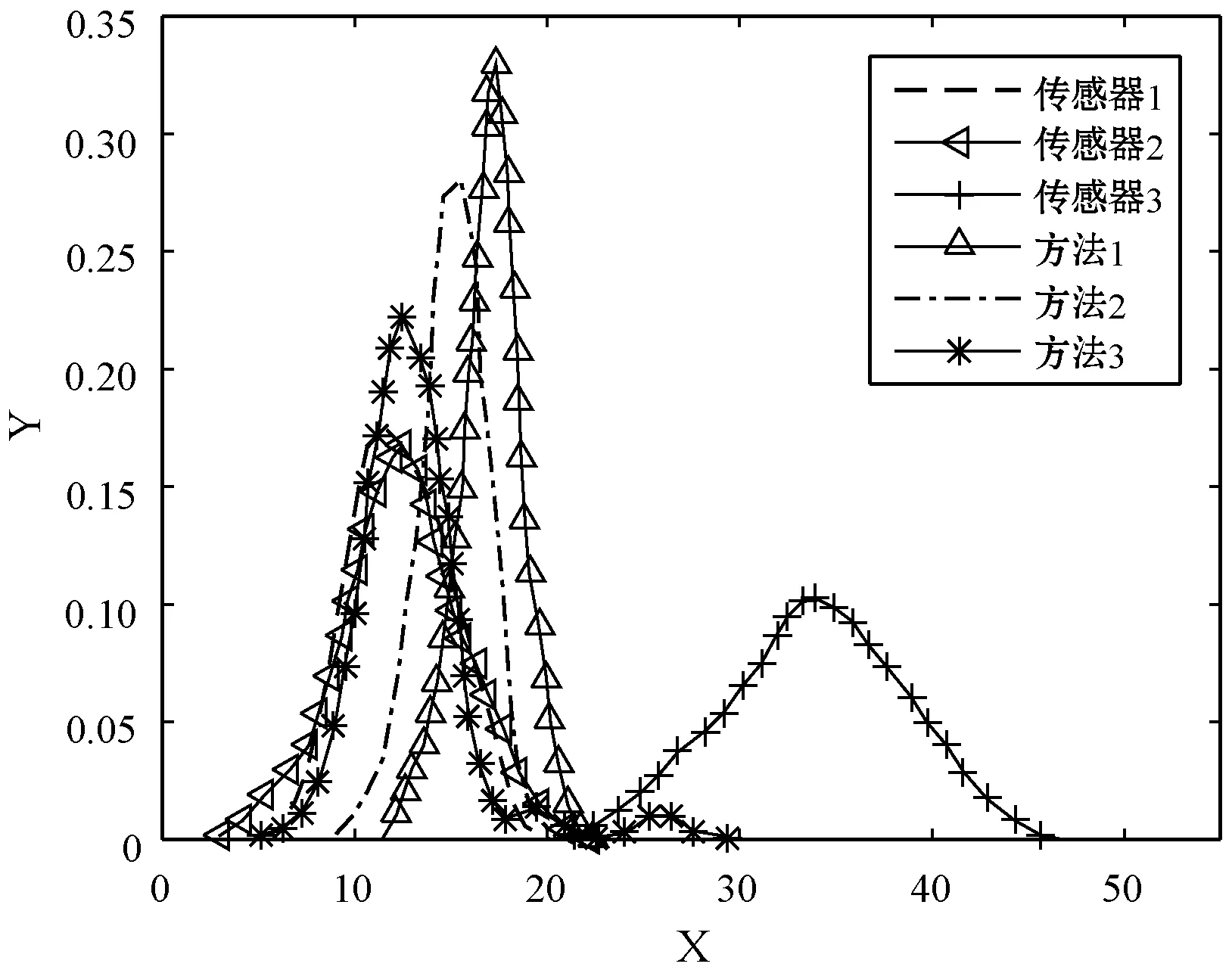
(d) 传感器3的测量数据偏离真值的后验概率分布图1 多种数据点的实验结果
此外,利用上述的方法产生了10 000个数据点,并分别利用三种方法和基于协方差和基于置信准则的多传感器融合算法进行融合,实验结果如表1所示。由表1可知,方法3的均值最接近真实值,方法2和方法1次之,基于协方差和基于置信准则的算法误差较大。和方法1相比,方法3减少了均方根误差约28%,方法2减少了均方根误差约20%。
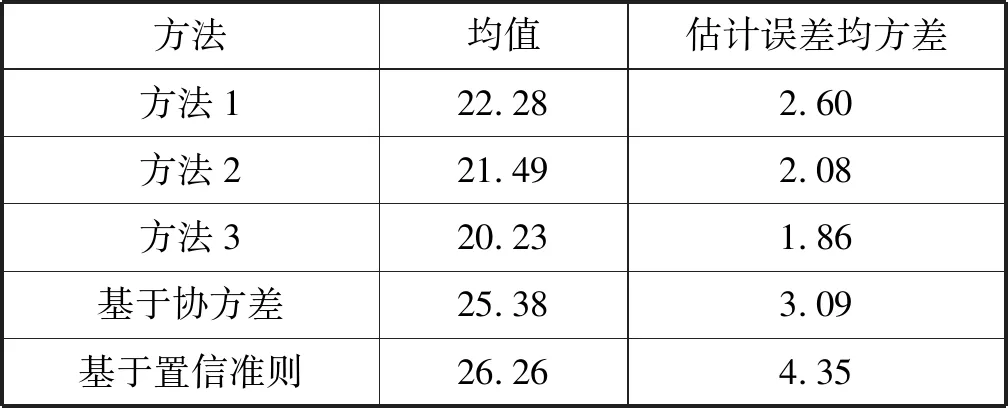
表1 算法的均值和均方误差比较
图2展示了上述10 000个数据点中的100个样本点。可以看出,总体上,方法3的融合结果最接近真实值。这是因为方法3具有上文所述的识别和消除伪数据的内部机制,这是通过比较其中一个传感器与其他两个传感器的差值来实现的。但是当3个传感器中同时有两个传感器产生相近的伪数据时,该方法失效,因为其错误地将第三个传感器的数据识别为伪数据。图2还展示了该点的具体融合结果。传感器2和传感器3都同时产生伪数据,但是,由于它们相互接近,方法3反而将传感器1的的测量值当成了伪数据,并从融合结果中剔除了该测量值,从而产生了错误的估计。同样地,方法2对传感器2和传感器3的测量值赋予了较大的权值,同样产生了不准确的结果。然而,在实际中同时发生两个伪数据的可能性是很低的,因此可忽略这种情况,基于协方差算法和基于置信准则的方法,由于不能够识别伪数据,因此获得的融合结果不理想。

图2 10 000个数据的实验结果
5 结 语
为了避免求熵的积分计算,本文提出利用最大后验概率的互信息作为检测量的方法识别伪数据。比较三种方法:方法1基于简单的贝叶斯融合;方法2增加了上述的置信因子并采用集中融合的方式;方法3分步地融合传感器数据,并识别剔除伪数据。最后通过仿真实验测试了上述三种方法,实验结果表明:方法3识别伪数据的效果最好,因为伪观测值的剔除保证了更准确的结果。方法2要优于方法1,因为该方法存在一种内部机制,该机制会给一致的数据赋予较大的权值而对于伪数据会赋予较小的权值。该方法可用于导航领域,将多个导航传感器的信息进行融合得到更加可靠更加精确的导航参数。