机械手系统设计
2020-04-18李小斌
郭 迪 李小斌 汪 斌
(宝鸡文理学院电子电气工程学院,陕西 宝鸡721016)
机械手是一种在现代自动化生产过程中具有抓取和移动工件功能的自动化设备,它是一种在机械化、自动化生产过程中发展起来的新型设备。机械手可以代替员工进行一些危险、枯燥的工作,在缓解工人劳动强度的同时提高生产效率[1]。随着其控制技术的成熟及成本的降低,机械手在工业生产中的应用越来越普及,这也促使各大高校在机器手的研究和教学方面越来越重视。这里给出一种基于西门子S7-1500 型PLC 的简易低成本教学机械手系统实现方案,该方案不仅可以使学生了解机械手的工作过程,也可以作为学生机电一体化控制系统的综合设计训练。
1 机械手的组成结构及控制过程
如图1 所示,机械手主要由底座、立柱、伸缩臂、升降臂和手抓组成。机械手执行机构的各部件和驱动系统均安装于机座上,起支撑和连接的作用[2]。其任务是将物料从A 传送带上的搬运到B 传送带的上。
具体工作过程如下:上电时,所有气缸恢复起始位置,手部夹持气缸处于松开状态,手臂处于缩回状态,升降气缸处于缩回状态。当A 传送带上的物料到达时,传感器检测到物料信号并控制传送带A 暂停,同时伸缩臂气缸下降,手抓气缸加紧物料,然后伸缩臂气缸上升,A 传送带工作,手臂气缸伸出,升降气缸再下降,将物料放置到B 传送带,然后夹持气缸松开物料,所有气缸复位,完成一次物料搬运。然后,当A 传送带上再次送来物料时,系统重复完成上述动作,从而时限将传送带A 上的物料全部搬运到传送带B 上。这里机械手控制方式有手动控制模式和自动循环控制模式可供选择。
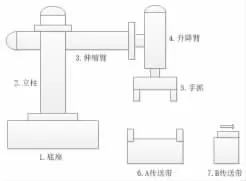
图1 机械手动作过程

图2 控制系统
2 系统硬件设计
2.1 机械手的气动系统设计[3]
机械手的所有动作采用气动系统实现,气压传动系统工作原理是由空气压缩机(排气压力大于0.4~0.6MPa)产生气源,通过快换接头进入储气罐,然后经气动三联件(干燥器、调压阀、油雾器)将分水过滤后进入各并联气路上的电磁阀,以控制气缸和手部动作。系统涉及到的元器件有气源空气压缩机、气动三联件、二位五通电磁阀、节流阀、气缸等等。
2.2 机械手的控制系统设计
机械手的控制系统如图2 所示。控制器选用西门子S7-1500 型PLC,接收各个传感器及控制按钮的输入信号,同时将其处理后,发出相应输出信号控制各个电磁阀工作,以控制相应气缸动作。触摸屏也可代替控制按钮实现控制指令的发送,同时也可实现机械手工作状态的实时监控。计算机主要用于PLC 程序开发和系统在线调试。
(1)机械手PLC 的I/O 分配。系统I/O 分配使系统每一个动作都可以采用按钮手动操作,自动、手动模式切换采用转换开关SA,伸缩气缸和升降气缸分别设有限位保护SQ1~SQ4,工件到位采用光电传感器G 检测。伸缩气缸、下降气缸以及手抓气缸分别采用电磁阀YA1、YA2、YA3 控制。上电及运行状态均有指示灯指示。(2)系统PLC 外部接线图。机械手控制系统PLC 外部电气接线采用西门子S7-1500 型PLC, 主要由电源模块、CPU模块、输出模块、输入模块组成,电源通过背部总线给各模块供电,同时各模块通过背部框架总线进行相互通信。PLC 电源为24V 直流电,电磁阀、指示灯均为直流24V。
3 系统软件设计
3.1 PLC 控制程序设计
西门子S7-1500 系列PLC 使用的编程软件是TIA Portal 软件,它是完全集成的自动化软件,是西门子工业自动化集团发布的全新集成自动化软件。它是业界首款具有统一工程和软件项目环境的自动化软件,适用于几乎所有自动化任务,本文所采用的是TIA 博途V14。
机械手控制系统上电后处于待机状态(同时上电指示灯亮);按下启动按钮后,系统运行指示灯亮;此时可以选择手动运行模式或自动运行模式。当转换开关SA 打在手动运行模式时,则自动模式关闭,只能进行手动操作,通过每一个控制按钮或触摸屏按钮操作机械手的每个动作。当选择自动运行模式时,工件检测传感器检测到工件到来时,A 传送带暂停,机械手臂下降,手臂下降到位后,手抓执行夹紧动作,2S 后手臂上升。手臂上升到位后伸出,伸出到位后手臂下降,下降到位后手抓执行松开动作,将工件放到B 传送带上,2S 后手臂上升,上升到位后手臂缩回复位,等待下一个工件到来。
3.2 人机界面设计
人机界面(HMI)选用的触摸屏为北京昆仑通态触摸屏(MCGS),型号是TPC7062Ti。其设计过程如下。
(1) 建立工程。建立新工程,选择触摸屏的型号为TPC7062Ti,调节背景色等。(2)设备窗口参数设置。从工作台窗口进入设备窗口进行设备组态,点击设备管理,选择通讯属性。本文选择通用TCP/IP 父设备;其次选择对应的控制设备本文选择设备Siemens_1500,设备组态完成后,进行参数设置。(3)实时数据库建立。根据组态的需要,建立对应的数据库,单击新增对象,设置对象的名称及数据类型。(4)机械手组态画面设计。在工作台窗口选择用户窗口,新建立窗口,并命名为“机械手控制系统”。打开“机械手控制系统”窗口,进行画面设计。根据设计要求设置显示、监控、控制的据图参数。(5)触摸屏和PLC 通信设置。西门子S7-1500 PLC 和MCGS 触摸屏实现通信,需对PLC 的IP地址进行设置,PLC 的IP 地址应和触摸屏、计算机的IP 地址处于同一子网内,即PLC 的IP 地址为192.168.1.153。PLC 的连接机制应选择允许来自远程对象的PUT/GET 通信访问。
3.3 运行效果
触摸屏不仅可以监控机械手的运行,还可以对其进行控制,整个系统通电后,在触摸屏的监视画面上,电源指示灯亮。按下启动按钮后,运行指示灯亮。选择运行模式,进行操作。当切换开关打到垂直位置时,系统运行在自动模式,实现自动将传送带上的物料不停搬运到传送带B 上;当系统运行在手动模式时,按下手动操作模块的各个按钮,可完成相应执行动作。该模块不仅可以实现单步运行,还可用于各个动作的状态检查。
4 结论
本文给出了简易机械手系统的完整实现方案,该系统包括了气动系统、PLC 控制系统以及触摸屏的具体设计方法,将其引入到自动化、控制类专业教学中,作为工程案例教学或综合项目教学,可以达到专业综合训练的目的,同时可减少设备投资,激发学生学习兴趣。
