基于图像处理的炮弹跳角测量方法研究
2020-04-18姜曼王军,2王磊李娜
姜 曼 王 军,2 王 磊 李 娜
1(苏州科技大学电子与信息工程学院 江苏 苏州 215009)2(中国科学院长春光学精密机械与物理研究所 吉林 长春 130033)
0 引 言
炮弹发射前身管轴线与炮弹发射后初速度矢量之间的夹角称为跳角。跳角是影响火炮射击精度的重要参数之一,火炮的射击精度越高,对目标的毁伤概率就越大。因此,准确测量火炮跳角,是火炮射击精度快速分析和诊断的关键环节,也是设计高性能火炮切急需的[1]。
靶板法是目前广泛采用的火炮跳角测量方法,在炮口前面给定靶距位置竖立一面靶板,火炮射击后,弹丸在该靶板上留下弹孔,弹孔中心与靶板上瞄准中心之间的偏差量就表示跳角大小[2]。由于靶板法具有不能满足大射角测量和测量效率低等固有缺陷,人们又提出了PSD法、陀螺仪法、线阵CCD立靶法和重叠法等改进方法。PSD法能快速给出跳角时间曲线和幅值,但在炮口振动高加速度情况下,给PSD工作可靠性带来了技术挑战,因此目前为止,还未有火炮射击条件下PSD法跳角测量的文献报道[3]。陀螺仪法主要应用于坦克炮,而且陀螺仪由于炮口振动加速度太大而不能正常工作,有用信号与干扰信号不能有效分离,最终不能达到设计目的[4]。线阵CCD立靶法的优点是用光幕靶代替靶板,立靶不影响弹丸飞行姿态,能快速自动给出测量结果,初速和跳角能同时测量,节省弹药,其缺点为可能出现漏测现象,位移分辨率还有待提高[5-6]。
本文针对跳角测量方法效率低、误差大、实用性小、测量范围窄等缺点,提出一种基于图像处理的炮弹跳角计算测量方法。火炮跳角测量的精准度主要取决于炮口中心位置和火炮射击目标的瞄准,因而准确定位炮口中心的坐标位置十分重要,故本文侧重于研究测量过程中的关键算法——炮口图像中心定位算法。
1 基于图像处理的炮弹跳角测量方法
基于图像处理的炮弹跳角计算检测原理是在炮筒中放入CCD相机,用来采集炮筒出炮口的图像,通过改进的圆拟合算法得到出炮口的中心位置O。根据双目的标定得到炮弹射击目标的位置坐标P1,当炮口中心位置O瞄准射击目标P1,则炮弹发射前炮口身管轴线矢量方向为OP1,炮弹射击后,拟合炮弹运动轨迹,炮弹在飞行过程中受到重力下降的影响经过射击目标所在平面形成着弹点P2,根据重力下降计算得出炮弹初速度矢量的方向OP3,然后求解炮弹初速度矢量与发射前炮口身管轴线之间夹角θ,即为火炮的跳角测量值。基于图像处理的炮弹跳角测量示意图如图1所示。

图1 基于图像处理的炮弹跳角测量示意图
图2为基于图像处理的炮弹跳角计算流程。
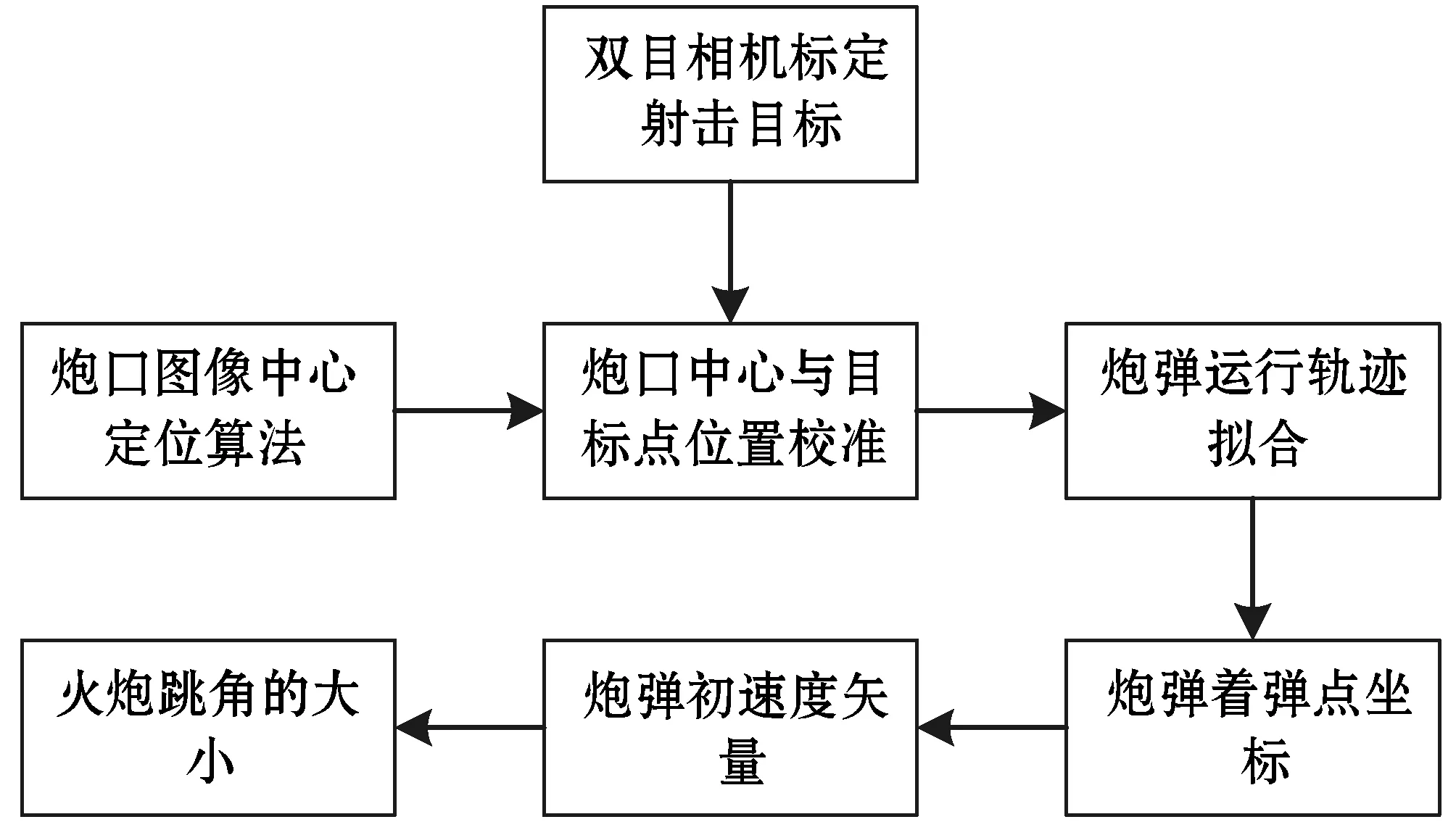
图2 基于图像处理的炮弹跳角计算流程
炮弹发射前身管轴线与炮弹发射后初速度矢量之间的夹角称为跳角,而炮弹发射前炮口身管轴线主要取决于炮口中心位置和射击目标的校准,因此高效精准的炮口中心定位算法十分重要。
2 炮口中心定位算法
2.1 圆拟合算法
基于圆拟合的检测炮口中心的算法的依据是:基于最小二乘法圆拟合原理(最小残差平方和)来逼近炮筒出炮口的轮廓[7-8]。然后求解得出炮口的中心位置。圆的参数方程如下:
(x-a)2+(y-b)2=r2
(1)
在此,取残差为:
εi=(xi-a)2+(yi-b)2-r2
(2)
式中,i∈E,E表示所有边界的集合;(xi,yi)为图像边界点的坐标。
残差的平方和如下:
(3)
根据最小二乘原理,可知:
(4)
由式(3)和式(4)可得:
(5)
式中:
(6)
由此可以推算出参数a、b、r的表达式,即圆参数:
(7)
根据计算过程,可以看出基于最小二乘原理的圆拟合方法虽然形式略复杂,但是基于此算法的炮口中心定位算法仅需对边界点循环一次就可计算出各圆参数,半径r也只需计算一次就可获得,因此算法的整个计算速度很快。算法还能够多次迭代,运算的精度很高[9-10]。
但是基于最小二乘原理的圆拟合算法抗干扰能力比较差,当存在随机噪声时,计算得到的中心位置的精确度会明显降低;当遇到外界的强干扰时,得到的中心位置甚至可能会有很大的偏差[11-12]。
2.2 改进算法
针对最小二乘法炮口中心定位算法的抗干扰能力差的缺点和火炮炮口图像特征明显的特点,本文在圆拟合算法的基础上进行改进,以提高算法的抗干扰能力和炮口中心定位的精度。结合炮口采集图像的特征,对各种外界干扰噪声进行滤除,来达到提高抗干扰的目的,改进算法主要分以下4个部分:(1) 如图3(b)、(c)所示,为了方便提取图像信息,对原始图像进行灰度化和二值化,图像二值化后可以大幅减少图像中的数据量,同时能凸显出目标物体的轮廓;(2) 如图3(d)所示,对图像进行平滑滤波操作,图像滤波处理不仅能够去除一些噪声,还可以保留图像的边缘信息,有利于图像的进一步处理;(3) 如图3(e)所示,对滤波后的图像进行边缘检测,边缘检测算子选择Canny算子,Canny算子相比于其他算子能更好地保留物体边缘;(4) 如图3(f)所示,对图像进行圆拟合,得出炮口中心位置,以便炮口中心位置与射击目标位置的瞄准。

(a) 炮口原图 (b) 图像灰度化 (c) 二值化图片
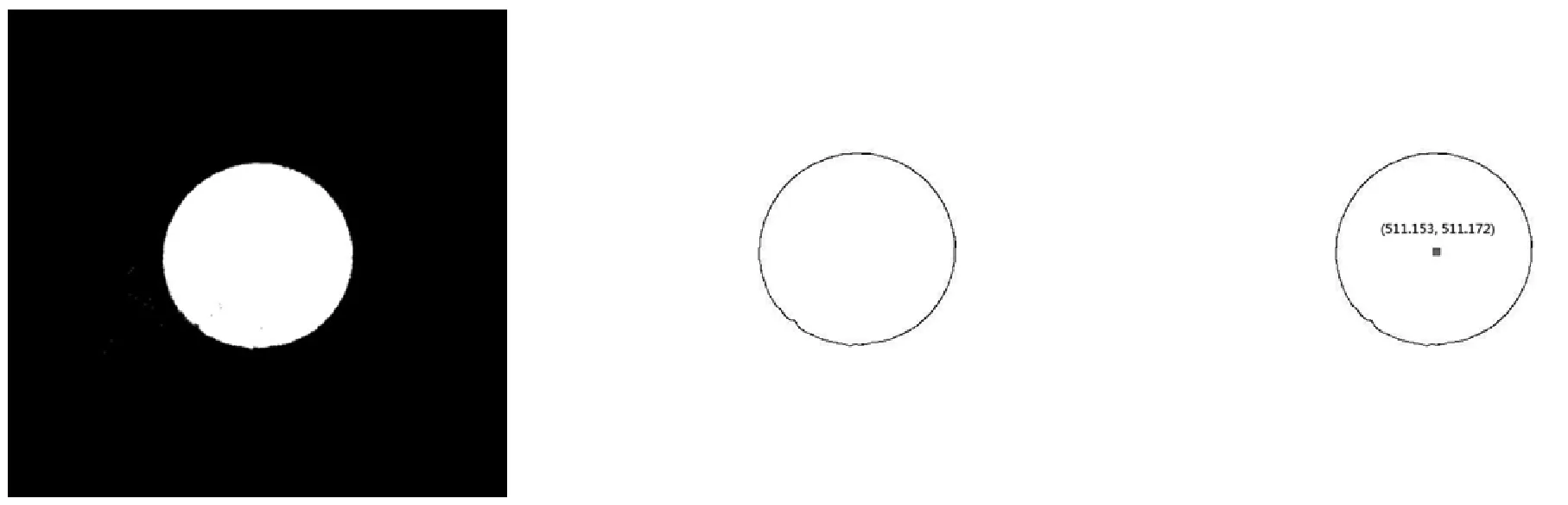
(d) 高斯平滑滤波 (e) 提取边缘 (f) 中心定位图3 改进算法图像处理分析
改进算法的基本流程图如图4所示。
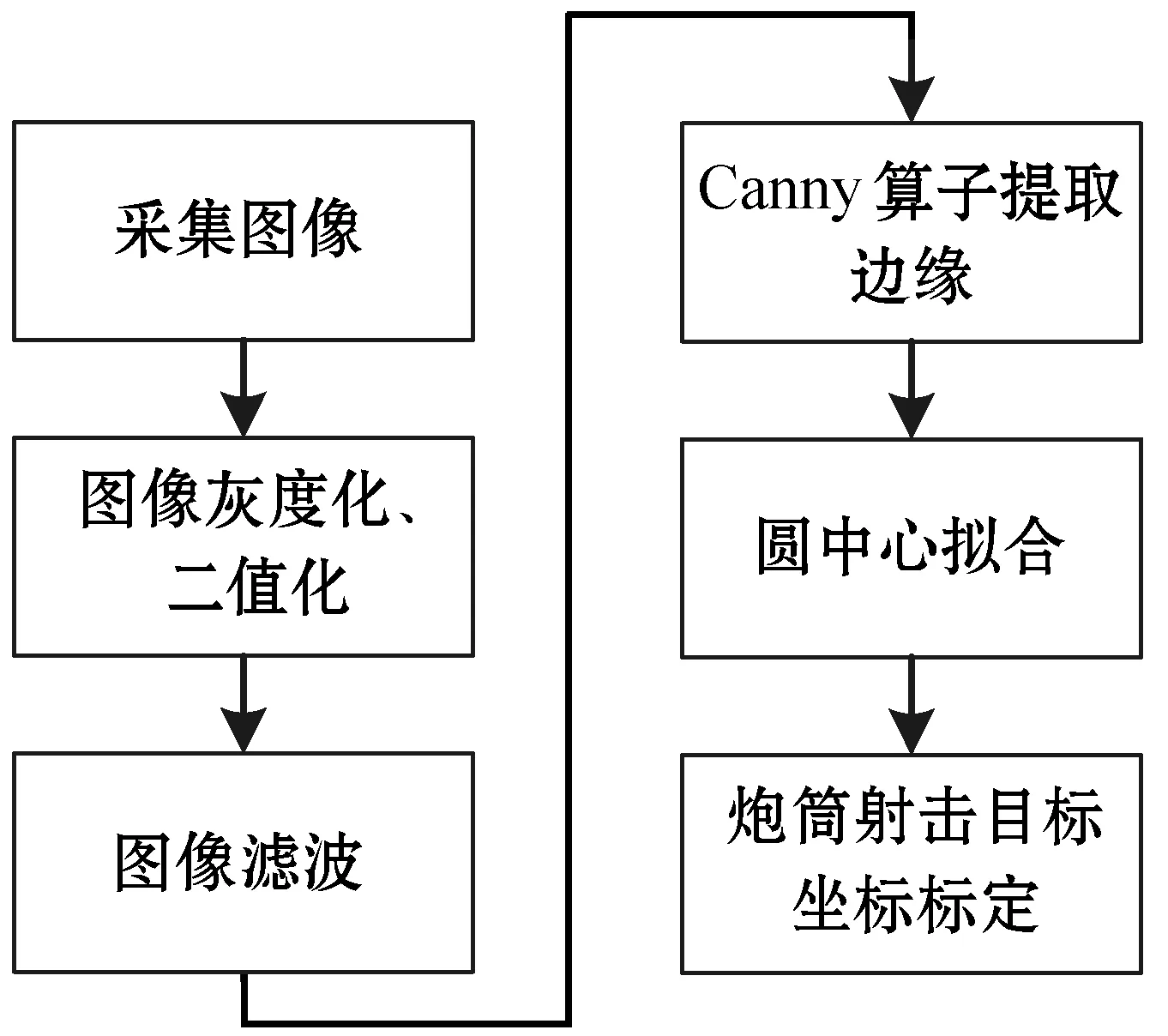
图4 改进算法的基本流程图
本文使用DALSA公司1M60相机采集炮口图像,将CCD测量相机装置放入火炮炮筒中,该CCD相机图像传感器的中心点与火炮瞄准光轴对齐。采集到的炮口图像的大小为1 024×1 024像素,在实验中,采集10组炮口图像,用传统的最小二乘圆拟合算法、霍夫算法[13-14]和本文改进的算法对炮口图像中心进行定位处理后,处理结果如表1所示。理想的炮口图像中心像素坐标为(511.00,511.00),霍夫算法的中心坐标为(511.884,511.768),最小二乘算法得到的中心位置坐标为(511.499,510.515),本文算法的中心坐标为(511.116,511.138)。三组中心位置和实际理论坐标的误差散点图如图5所示,可以看出,最小二乘圆拟合算法的中心测量精度高于霍夫算法,但本文算法与最小二乘法圆拟合算法相比,稳定性好,精度高,算法误差在0.20个像素以内,具有较高的精度。

表1 炮口图像中心算法计算结果对比分析 像素

图5 误差散点图
3 火炮跳角的计算
当炮口中心位置和射击目标精准对准时,根据双目相机的标定,建立三维世界坐标,建立以炮弹射击目标所在平面W深度方向为Y轴,水平垂直于Y轴方向为X轴,竖直垂直于Y面方向为Z轴建立三维坐标系,如图6所示。

图6 火炮跳角计算示意图

炮弹初速度矢量的方向为:
炮弹发射前炮口身管轴线矢量方向为:
OP1=(x1,-x0,y1-y0,z1-z0)
跳角定义得跳角θ=γ-φ。其中,γ和φ的表达式为:
(8)
(9)
则跳角θ的大小为:
(10)
4 结 语
本文通过对圆拟合算法的改进,有效地减少了图像采集时所引入的噪声,提高了抗干扰性,综合考虑CCD图像畸变,图像采集处理所产生的误差,基于图像视觉的火炮跳角测量方法的检测误差远小于人工测量误差。其实用性、可行性,对部队检测火炮射击精度具有极大帮助。该系统已开始应用于部队火炮的跳角检测测量中,正在进一步推广。