一种客车驾驶防干扰装置设计
2020-04-17刘国兵包梦涵常兆瑞顾芊芊
刘国兵 包梦涵 常兆瑞 顾芊芊
摘 要:为保障客车驾驶员的良好驾驶环境,防止乘客拉扯方向盘造成行车安全事故,设计了一种摩擦式客车驾驶防干扰装置。本装置采用高速摄像头与LM1881图像处理电路识别干扰源,采用角速度传感器测量方向盘转动角速度。中央处理模块进行数值处理后,将其与数据库中安全阈值进行对比,决定是否启动摩擦锁紧装置与联动制动系统,从而协助驾驶员控制方向并实现汽车减速,同时开启危险警示灯,保障客车行车安全。
关键词:客车;防干扰装置;摩擦锁紧装置;联动制动系统
中图分类号:U436.6文献标识码:A文章编号:1003-5168(2020)01-0092-03
Abstract: In order to ensure a good driving environment for bus drivers and prevent passengers from pulling the steering wheel, a friction type anti-interference device for bus driving was designed. The device uses high-speed camera and LM1881 image processing circuit to identify the interference source, and uses the angular speed sensor to measure the steering wheel rotation angular speed. After numerical processing, the central processing module compares it with the safety threshold in the database to decide whether to start the friction locking device and the linkage braking system, so as to assist the driver to control the direction and realize the deceleration of the car, and at the same time, turn on the hazard warning light to ensure the driving safety of the bus.
Keywords: bus;anti-interference device;friction locking device;linkage brake system
目前,司机在驾驶客车过程中出现一些新的安全问题,例如,某些乘客因下站等问题与司机发生争执,出现了一些辱骂等不良行为,甚至恶意抢夺方向盘,造成行驶中的客车存在极大的安全隐患。如何应对这种极端的突发事件,成为各级公安部门和交通执法员共同关注的热点。
我国客运市场庞大,针对乘客拉扯方向盘造成安全隐患进行防范研究非常必要。但目前,国内外针对此方面的研究比较罕见[1]。
针对上述问题,本文以金龙XMQ6119型客车为研究载体,设计出一种摩擦式汽车驾驶防干扰系统。该系统可以在客车驾驶员遇到非理性乘客拉扯抢夺方向盘时,锁紧转向柱、联动制动系统,协助驾驶员控制方向,并开启危险警示灯、实现减速停车,保障行车安全。
1 系统硬件设计
1.1 系统总体框架
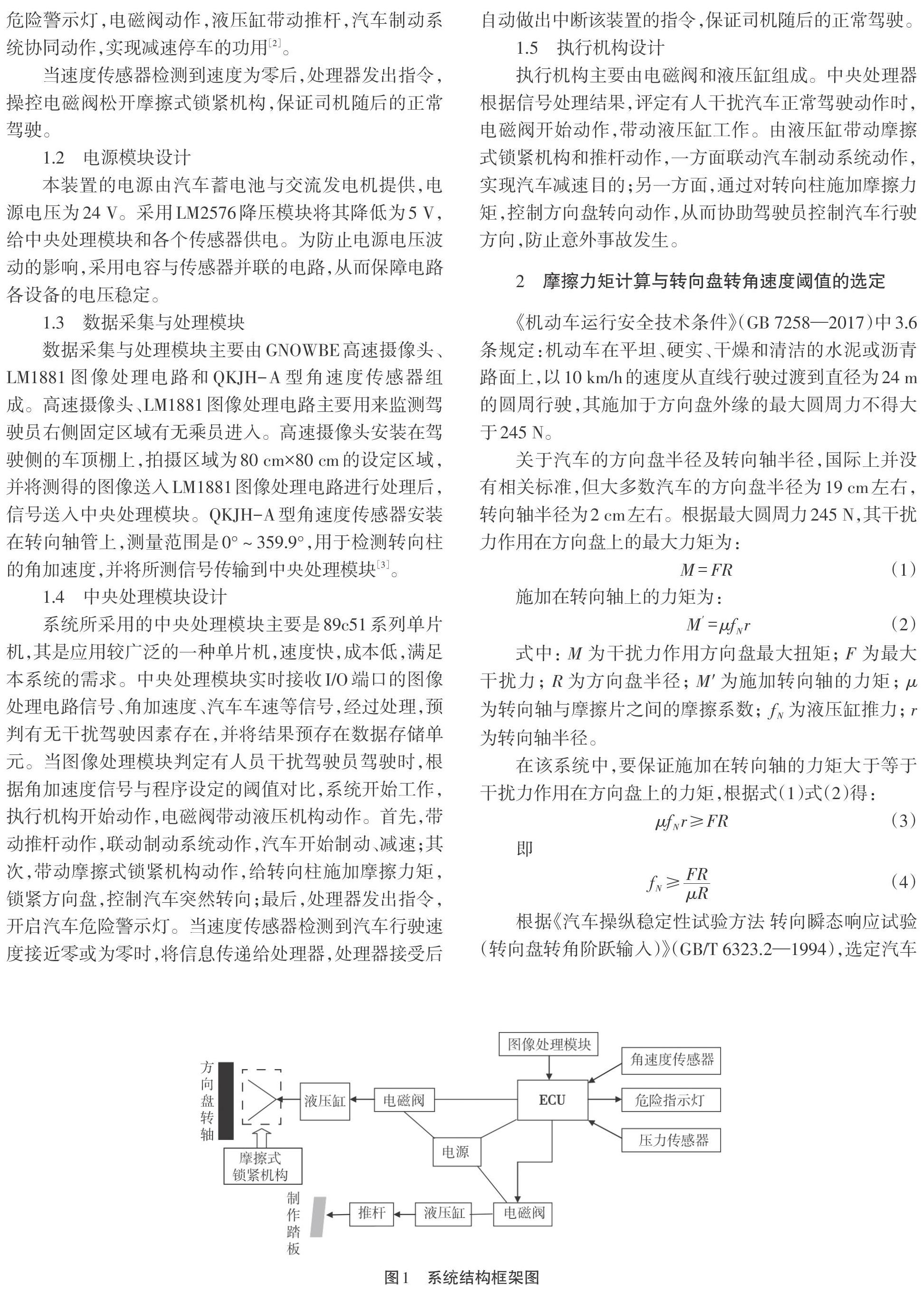
本装置主要组成部件有电源模块、89c51处理器、摄像头、角速度传感器、摩擦式锁紧机构、电磁阀、液压缸等。装置组成框架如图1所示。
该系统综合考虑了司机正常驾驶和乘员恶意干扰时方向盘的受力状况,并进行了乘员干扰时的情景模拟,是结合现有技术和小组创新成果设计的。该装置的基本工作原理为:通过图像识别技术,预判干扰人员的存在,再结合压力传感器检测转向盘作用力,若超过阈值,判定有抢夺方向盘的行为。处理器判定干扰后,电磁阀动作,液压缸带动摩擦式锁紧机构、压住转向柱,两者产生摩擦力,增加转向阻力,从而稳定汽车方向。与此同时,开启危险警示灯,电磁阀动作,液压缸带动推杆,汽车制动系统协同动作,实现减速停车的功用[2]。
当速度传感器检测到速度为零后,处理器发出指令,操控电磁阀松开摩擦式锁紧机构,保证司机随后的正常驾驶。
1.2 電源模块设计
本装置的电源由汽车蓄电池与交流发电机提供,电源电压为24 V。采用LM2576降压模块将其降低为5 V,给中央处理模块和各个传感器供电。为防止电源电压波动的影响,采用电容与传感器并联的电路,从而保障电路各设备的电压稳定。
1.3 数据采集与处理模块
数据采集与处理模块主要由GNOWBE高速摄像头、LM1881图像处理电路和QKJH-A型角速度传感器组成。高速摄像头、LM1881图像处理电路主要用来监测驾驶员右侧固定区域有无乘员进入。高速摄像头安装在驾驶侧的车顶棚上,拍摄区域为80 cm×80 cm的设定区域,并将测得的图像送入LM1881图像处理电路进行处理后,信号送入中央处理模块。QKJH-A型角速度传感器安装在转向轴管上,测量范围是0°~359.9°,用于检测转向柱的角加速度,并将所测信号传输到中央处理模块[3]。
1.4 中央处理模块设计
系统所采用的中央处理模块主要是89c51系列单片机,其是应用较广泛的一种单片机,速度快,成本低,满足本系统的需求。中央处理模块实时接收I/O端口的图像处理电路信号、角加速度、汽车车速等信号,经过处理,预判有无干扰驾驶因素存在,并将结果预存在数据存储单元。当图像处理模块判定有人员干扰驾驶员驾驶时,根据角加速度信号与程序设定的阈值对比,系统开始工作,执行机构开始动作,电磁阀带动液压机构动作。首先,带动推杆动作,联动制动系统动作,汽车开始制动、减速;其次,带动摩擦式锁紧机构动作,给转向柱施加摩擦力矩,锁紧方向盘,控制汽车突然转向;最后,处理器发出指令,开启汽车危险警示灯。当速度传感器检测到汽车行驶速度接近零或为零时,将信息传递给处理器,处理器接受后自动做出中断该装置的指令,保证司机随后的正常驾驶。
1.5 执行机构设计
执行机构主要由电磁阀和液压缸组成。中央处理器根据信号处理结果,评定有人干扰汽车正常驾驶动作时,电磁阀开始动作,带动液压缸工作。由液压缸带动摩擦式锁紧机构和推杆动作,一方面联动汽车制动系统动作,实现汽车减速目的;另一方面,通过对转向柱施加摩擦力矩,控制方向盘转向动作,从而协助驾驶员控制汽车行驶方向,防止意外事故发生。
2 摩擦力矩计算与转向盘转角速度阈值的选定
《机动车运行安全技术条件》(GB 7258—2017)中3.6条规定:机动车在平坦、硬实、干燥和清洁的水泥或沥青路面上,以10 km/h的速度从直线行驶过渡到直径为24 m的圆周行驶,其施加于方向盘外缘的最大圆周力不得大于245 N。
关于汽车的方向盘半径及转向轴半径,国际上并没有相关标准,但大多数汽车的方向盘半径为19 cm左右,转向轴半径为2 cm左右。根据最大圆周力245 N,其干扰力作用在方向盘上的最大力矩为:
根据《汽车操纵稳定性试验方法 转向瞬态响应试验(转向盘转角阶跃输入)》(GB/T 6323.2—1994),选定汽车方向盘转动角速度阈值为20°/s。当系统检测到有干扰源存在时,且方向盘转动角速度大于阈值时,中央控制器启动摩擦式锁紧机构,给转向柱施加相应的摩擦力矩,阻碍方向盘非正常转动。
3 系统工作流程
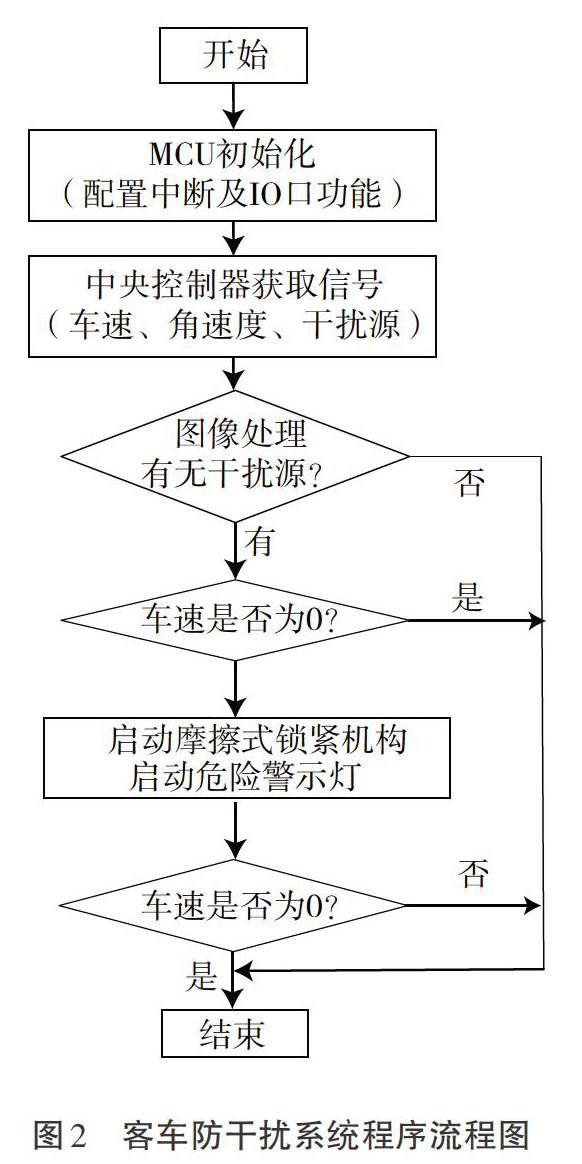
本系统的工作流程如图2所示。系统启动后,首先要进行MCU初始化,初始化的内容包括配置中断及IO口的功能。然后进行干扰力接收的初始化,初始化的內容包括配置工作寄存器、设置方向盘安全作用力范围、司机正常驾驶和乘客恶意干扰对方向盘压力的判别功能。初始化完成后,图像处理模块开始工作,检测有无干扰源进入相应区域。当系统检测到有干扰源存在后,对方向盘角加速度进行循环检测,一旦检测到有异常情况出现,自动判断转向角速度有无超出预设的安全范围(20°/s)。若超出预设的安全范围,则立即启动方向盘的摩擦锁止功能,并联动汽车制动系统实现客车降速,同时触发危险报警装置。系统会持续检测客车行驶速度和方向盘角速度,若车速下降至零,则结束方向盘锁止,系统重新进入循环检测模式,若车速不为零,则继续执行上述程序。如果未超出预设范围,则系统不动作。
4 结语
为了解决客车驾驶干扰问题,本文设计了一种客车驾驶防干扰装置,其通过图像处理模块识别干扰源的存在,通过监测汽车车速与方向盘的转动角速度,与方向盘转动的阈值对比,适时启动摩擦式锁紧机构与联动汽车制动系统,开启危险警示灯,降低汽车行驶速度,协助驾驶员控制行驶方向,从而保障行驶安全。
参考文献:
[1]雷斌,曾伟.车辆产生仿真模型[J].计算机与数字工程,2005(10):127-129.
[2]余志生.汽车理论[M].北京:机械工业出版社,2017.
[3]刘勇,蒋世贵,王乾,等.一种防货物撞伤运输车设计[J].内燃机与配件,2018(24):163-165.
