基于SolidWorks的列车转向架机器人清洗夹具设计及可靠性分析
2020-04-17郭涛孙中刚
郭涛 孙中刚
摘 要 以液压系统作为动力源设计转向架定位夹紧夹具,定位工装设计成可快速更换形式,通过机器人手爪实现工装更换及换型过程。应用SolidWorks的Simulation有限元分析工具[1],对夹具系统的关键零件横梁做有限元分析,通过应力、应变和变形等分析结果判断关键零件结构设计合理,能够满足变位夹具系统工作过程中的强度要求[2]。
关键词 转向架;机器人;清洗;变位机;SolidWorks;夹具;有限元
引言
在国内各车辆段,主要使用工业碱洗工艺进行转向架清洗,人工劳动强度大,碱洗后的废水如果处理不当会对环境造成损坏,目前的工艺及清洗效率已经不能满足国内铁路系统发展的需要。设计转向架机器人清洗工作站,转向架放置到变位夹具上夹紧并可做旋转变位,变位夹具系统能够兼容206P、209HS、209P、AM96、CL242、CW-1、CW-2、CW200K、SW-160和SW220K共10种型号转向架,以液压系统为动力源,通过机器人更换定位工装的形式实现多机种兼容。
1 列车转向架机器人清洗夹具设计
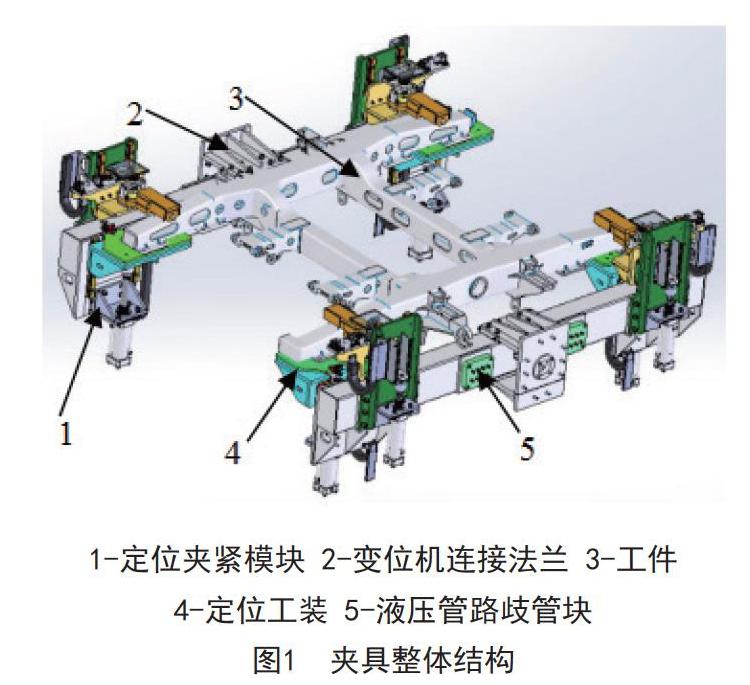
夹具主要由定位夹紧模块、变位机连接法兰、定位工装和液压管路歧管块等部分组成。变位机连接法兰和变位机输出轴连接,带动夹具整体可做±180°旋转,配合机器人完成整个转向架表面的干冰清洗过程。定位夹紧模块用于转向架的定位和夹紧,保证夹具整体旋转过程中工件不会移位。定位工装设计成可更换形式,更换机种作业时,机器人根据程序指令更换即将清洗型号工装,实现多机种夹具兼容。液压管路歧管块用于连接液压管,将夹具上的管路和液压站输入管路分开,便于日后设备维护。整个夹具主体模块化设计,各部分可互换。
2 基于SolidWorks的变位机横梁有限元分析
两套变位机横梁承载所有定位夹紧机构及工件,其设计强度为变位机设计关键因素。横梁整体采用Q235材料焊接而成,材料弹性模量2.12e11N/M?,泊松比0.288,屈服强度2.35e8N/M?。重型设备,取材料安全系数1.859[3],则许用应力为1.264e8 N/M?。变位机在工作过程中做±180°旋转,夹具体水平状态和竖直状态为姿态极限位,分别取两个极限位对横梁进行有限元分析,验证其强度可靠性。
2.1 夹具水平状态横梁有限元分析
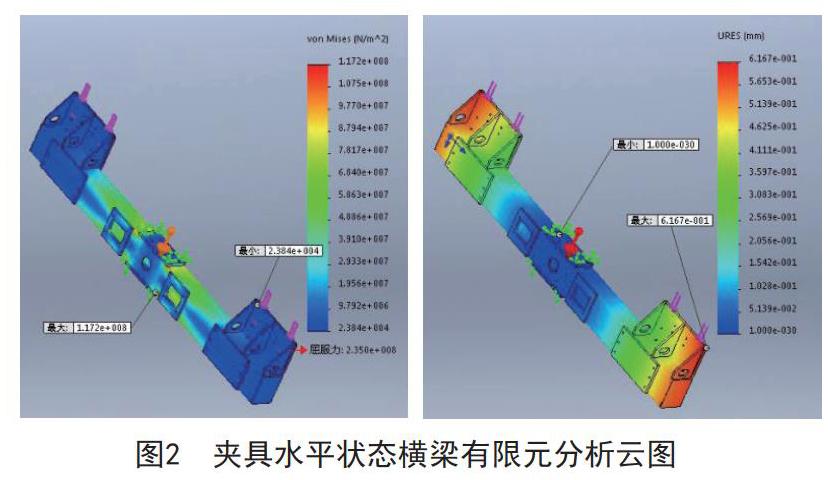
夹具体水平状态下,横梁最大应力1.172e8 N/M?,在许用应力范围内。最大变形量0.617mm,出现在悬臂和负载最大的两端位置。最大應变值为1.301e-4。
2.2 夹具竖直状态横梁有限元分析
夹具体竖直状态下,横梁最大应力0.328e8 N/M?,在许用应力范围内。最大变形量0.638mm,出现在悬臂和负载最大的两端位置。最大应变值为1.551e-4。夹具体竖直状态下,整个横梁受力情况优于水平状态。
3 结束语
(1)设计列车转向架机器人清洗变位夹具系统,夹具系统实现转向架±180度旋转,配合机器人完成列车转向架所有表面清洗;
(2)对夹具水平装配横梁做有限元分析,得出最大应力值1.172e8 N/M?,在许用应力范围内;
(3)对夹具水平装配横梁做有限元分析,得出最大应力值0.328e8 N/M?,在许用应力范围内。
参考文献
[1] 赵罘,杨晓晋,赵楠. SolidWorks 2018中文版机械设计从入门到精通[M].北京:人民邮电出版社,2018:78.
[2] DS SOLIDWORKS公司. SOLIDWORKS?Simulation基础教程[M]. 北京:机械工业出版社,2018:117.
[3] 赵丽娟,孙中刚,李国平.刨煤机牵引块可靠性分析及疲劳寿命预测[J].煤炭学报,2012,(3):516-521.