基于主被动量子关联成像的超分辨抗干扰探测系统研制
2020-04-17杨照华余远金李明飞吴令安
李 旺,杨照华,陈 香,余远金,李明飞,吴令安
(1.北京航空航天大学仪器科学与光电工程学院,北京100191;2.北京理工大学自动化学院,北京100081;3.北京航天控制仪器研究所,北京100039;4.中科院物理研究所,北京100190)
0 引言
量子关联成像也称为鬼成像(Ghost Imaging,GI)或强度关联成像,基于信号源的光场涨落,通过提取具有关联性质的光场强度脉动信息,进行符合测量完成对物体的成像[1]。在关联成像系统中,一般分为物光和参考光两路,物光使用桶探测器完成强度信号的采集,参考光路则测量光场的时间、空间分布信息[2];而传统成像则大部分基于透镜成像原理,建立物面与像面之间点对点一一对应的关系。2008年,Shapiro小组[3]提出了计算关联成像方案。而后,Silberberg等[4]利用计算机控制的空间光调制器(Spatial Light Modulator,SLM)产生的调制光场代替旋转毛玻璃产生的热光场,通过理论计算物面处的光强分布与桶探测器测得的光强值关联恢复出物体的信息。2014年,中科院上海光学精密机械研究所[5]联合中国科学技术大学等多家单位开展了强度关联遥感成像技术研究(一期),建立了三套被动式强度关联压缩感知多光谱成像的野外原理验证装置。之后,他们研制出了单光子强度关联光谱相机,开展了2km的野外成像,并采用互补测量的方法,优化了压缩感知算法,获得了高质量的图像输出[6]。尽管目前对于量子关联成像系统有很多的实施方案和相关研究,但全天时的量子关联成像探测系统未见相关报道。
主动量子关联成像具有超分辨、抗干扰能力强的优势;而被动量子关联成像则无需光源,灵敏度高、适应性好。由北京航空航天大学牵头,提出主被动量子关联成像探测方案,联合北京航天控制仪器研究所和中科院物理研究所共同研制了主被动量子关联成像探测原理样机,实现了全天时成像。
1 主被动量子关联成像原理
根据成像是否需要主动照明,可将量子关联成像分为主动和被动两种模式,两种模式的成像原理如图1所示。量子关联成像中的光强涨落可通过数字微镜器件(Digital Micro-mirror Device,DMD)预先加载调制矩阵的方式进行调控,光路简单,便于工程化应用。

图1 主被动量子关联成像原理图Fig.1 Schematic diagram of active and passive quantum correlation imaging
图1(a)中,激光器出射光经准直扩束后完整覆盖DMD镜面,将调制矩阵Ii(x,y)预先加载至DMD,透镜L1用于将完整的散斑图案投影到物体上,使用桶探测器测量对应散斑场的强度信号Si。图1(b)中,物体经由成像透镜L1投影至DMD镜面,调制后光强经收集透镜L2被桶探测器接收。
通过对散斑场Ii(x,y)和与之对应的强度信号Si进行二阶关联运算,可以恢复目标图像G(x,y), 可表示为

2 主被动量子关联成像探测方案
基于量子关联成像原理,利用被动量子关联成像的远距离、大视场、超灵敏优势,结合主动量子关联成像的抗干扰、超分辨特点,设计了主被动量子关联成像探测系统。系统总体方案如图2所示,主要包括主动光学系统、被动光学系统、电子学系统。主动光学系统采用近红外波段作为出射光源,分为发射和接收两路;被动光学系统采用可见光波段,前方望远光学系统可根据成像目标进行调整;电子学系统集成了数据采集单元、并行成像单元、时间同步触发以及供电单元各子模块。主被动系统分时复用,发挥各自优势,以达到全天时成像。
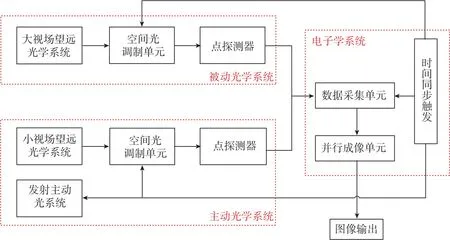
图2 主被动量子关联成像探测系统总体方案设计Fig.2 Overall scheme design of the active and passive quantum correlation imaging detection system
在被动量子关联成像系统中,大视场望远光学镜头的孔径为280mm,DMD选用VIALUX公司的V-9501,设计可调二次成像镜头用以将自然场景成像到DMD镜面,利用单光子探测器进行光强信号测量,灵敏度高且响应速度快。值得注意的是,望远镜头可根据实际成像需求进行单独设计用以收集足够光强。主动量子关联成像系统采用近红外光源,穿透力强,可以更好地抵抗大气湍流和散射介质干扰,DMD型号为V-7001,小视场望远光学镜头的孔径为170mm,焦距为4950mm@1km,探测镜头的孔径为50mm,焦距为200mm。折反式光路结构提高了空间利用率,近红外增透膜尽可能减少了光能损失,选用Thorlabs公司的近红外探测器PDA20CS2测量光强涨落,增益可调,灵敏度高。
3 主被动量子关联成像系统实验
主被动量子关联成像系统采用分布式结构设计,如图3所示,右侧为主动量子关联成像探测系统,左侧为被动量子关联成像探测系统。在各光学器件和探测器件之间均设置微调机构及锁紧机构,方便对光学系统进行调整,监视相机用以DMD镜面物像对准。

图3 主被动量子关联成像探测系统Fig.3 Photograph of the active and passive quantum correlation imaging detection system
3.1 超分辨成像
成像分辨率是评价成像系统的重要指标,传统成像方式下空间分辨率受光学衍射极限限制,根据Rayleigh判据[7],传统相机空间分辨率表达式为

式(2)中,λ为波长,D为入瞳直径,z为成像距离。
量子关联成像由于符合测量的特点,其空间分辨率取决于选用测量矩阵基和光学系统二者,可发挥超分辨的优势。在量子关联成像中,物面处的散斑大小可由下式确定

式(3)中,Si为单个散斑的面积,S总为物面处的散斑光场总面积,N为散斑个数,Li为量子关联成像的空间分辨率。在量子关联成像探测系统中,成像分辨率取决于二者的较大值。
实验选用波长为1064nm的近红外激光光源,半径为15cm的高反光圆形标识物作为目标,中间低反光十字长条宽度为3cm,成像距离为100m。进行多次分辨率测试,实验结果如图4所示。

图4 超分辨量子关联成像实验结果Fig.4 Experiment results of super-resolution quantum correlation imaging
实验结果表明,主被动量子关联成像探测系统可以很好地分辨出宽度为3cm的低反光十字长条,对应重构图像中的像素数目为36。由于进行双线性插值,实际对应重构图像的18个像素。因此,100m成像距离下的空间分辨率为1.7mm,探测镜头的口径为50mm,衍射极限分辨率为5.2mm,主被动量子关联成像探测系统实现了超分辨。
3.2 抗大气湍流成像
量子关联成像通过符合测量的方式将探测所得物体的光强涨落信号以及参考信息进行关联运算重构目标物体图像,强调获取涨落的物体光强信号,这种探测方式可以有效减少大气湍流在光信号传输过程中带来的消光、散射等影响,因此能够抵抗一定程度的大气湍流干扰,其具体条件为:1)量子关联成像的散斑光场横向相干尺寸lc需小于大气湍流平均相干尺寸ρ;2)量子关联成像方案中的参考光场传输路径和通过物体的光场传输路径需经历相同概率密度分布的大气湍流扰动。基于此,进行主被动量子关联成像探测系统的外场环境大气抗干扰测试,目标选取17km外的中央电视塔。其中,塔尖区域长度为0.841m,红白相间,特征明显,方便成像结果比对。对其进行多帧数据采集,成像结果如图5所示[8]。
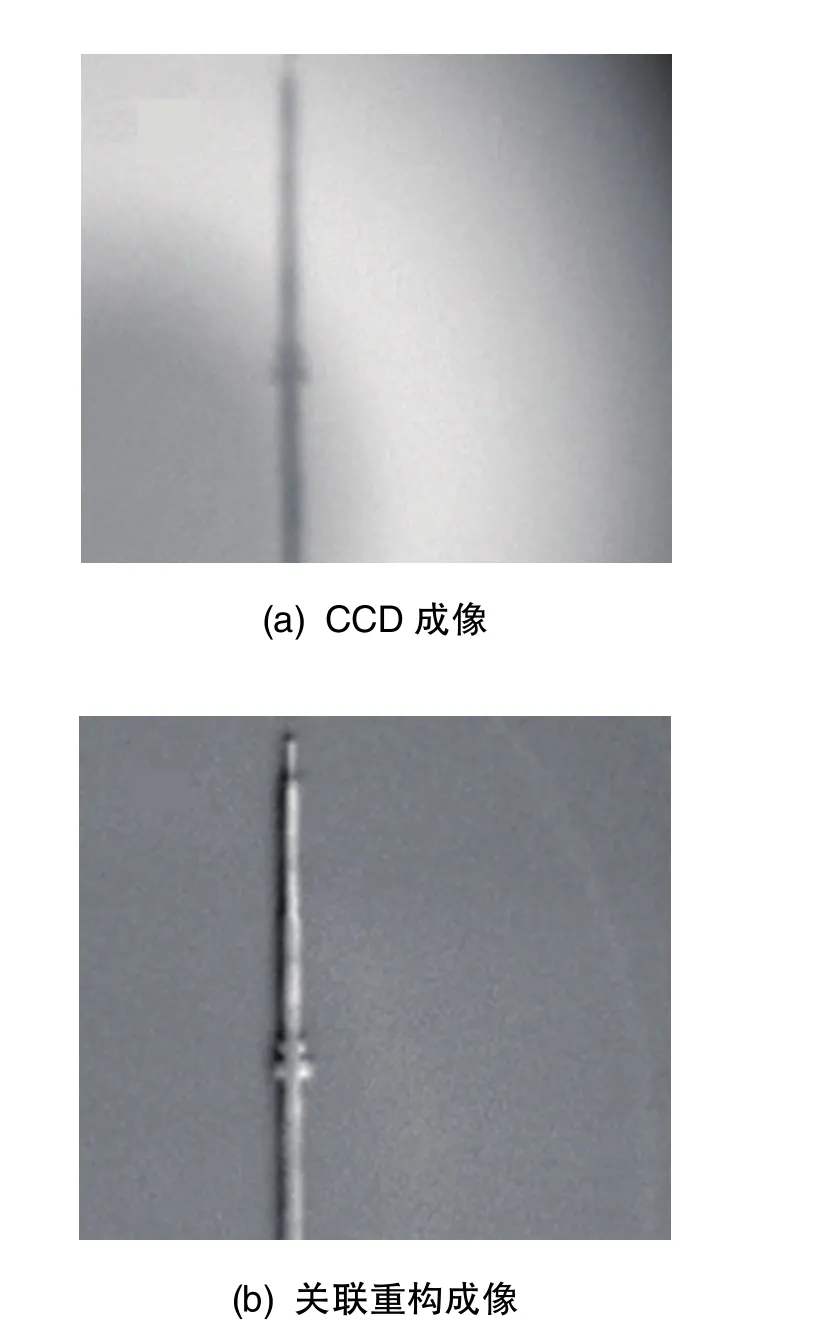
图5 抗大气湍流实验结果Fig.5 Experiment results under atmospheric turbulence
图5(a)为传统CCD相机的成像结果,塔尖部分的明暗对比度差。相较于此,图5(b)的图像质量得到明显提升,光强分布均匀,图像灰度较为平滑,对比度显著提高。由此可见,主被动量子关联成像系统的抗干扰性能良好。
3.3 日间远距离成像
为验证全天时主被动量子关联成像探测系统的性能,进行日间远距离实验,成像目标选为距实验地点34km的望京SOHO大厦T3楼,字母“S”可作为图像分辨率量化依据。该字体高度为4.4m,可近似看作三线靶标的 “三”。为进一步量化分辨率指标,对每8帧探测数据进行累加求平均,多次累加后图像信噪比有明显提升,其成像结果如图 6(a)所示[9]。 图 6(b)为图 6(a)中红线位置处的灰度分布,其中的蓝色圆圈内为字母 “S”所处位置的灰度值,在重构图像中占有11个像素。由于采用双线性插值,因此单个像素对应空间尺寸为0.8m。

图6 远距离重构结果Fig.6 Results of long-distance reconstruction
3.4 日间近距离成像
为验证不同距离条件下主被动量子关联成像探测系统的性能,进行日间近距离成像实验。以北京航空航天大学世宁大厦作为成像目标,大厦墙面缝隙实测为19.5mm。作为成像标志物,距离主被动量子关联成像探测系统688m,成像结果如图7所示。图7(a)为单帧成像结果,受噪声影响光强分布不均匀,但足以对大厦墙缝进行明显分辨。图7(b)为图 7(a)中红线位置处的灰度分布, 其中的两个蓝色圆圈分别为两处墙缝位置的灰度值。

图7 近距离关联成像Fig.7 Diagram of close-range correlation image
在近距离重构图像中,大厦墙面缝隙占据2个像素尺寸。因此,单个像素对应空间的实际尺寸为10mm。主被动量子关联成像探测系统在688m处可以分辨10mm量级目标物体,通过光学镜组的调整可以轻松实现不同距离的目标成像。
3.5 低于能见度500m条件下成像
在气象学中,能见度用气象光学视程表示。气象光学视程是指白炽灯发出色温为2700K的平行光束的光通量,在大气中削弱至初始值的5%所通过的路径长度。而若以人眼为检测标准,则能见度是指视力正常的人能将目标物从背景中识别出来的最大距离,即夜间能清楚看见目标灯的发光点。
夜间光照强度极弱,传统探测器无法接收物体有效信息,导致成像困难。量子关联成像的优势体现在极弱光背景下可以有效探测光强涨落,进而为目标图像重构提供有效信息。为此,在冬季夜间低光照强度下进行主被动量子关联成像探测系统能见度实验测试,选取世宁大厦内白炽灯灯管(光源强度为2700 K)作为成像目标,距离为688m,此时人眼无法分辨白炽灯灯管。应用主被动量子关联成像探测系统,目标重构图像轮廓清晰。如图8所示,验证了主被动量子关联成像探测系统的低能见度成像探测能力。

图8 低能见度重构图像Fig.8 Reconstructed image under low visibility conditions
4 结论
量子关联成像发展近30年以来,由于其具有高灵敏、超分辨、抗干扰等特点,已成为国内外的研究热点。其仅需单个无空间分辨能力的点探测器便可实现高灵敏的空间二维/三维成像的优势,为某些不可见波段的大面阵探测器受制于国外封锁提供了一条有效解决途径,自主可控。本文提出了基于空间光场调制的主被动量子关联成像方案,首次研制出了超分辨抗干扰的主被动量子关联成像原理样机,空间分辨率在34km远处可达0.8m,较传统相机超相同孔径分辨率近3倍。在大气湍流和能见度较低情况下具有良好成像性能,验证了主被动量子关联成像原理样机的全天时抗干扰成像能力。应用于复杂环境和外场不同光照条件下的主被动量子关联成像探测系统,对于对地观测、资源勘探以及目标追踪等具有极大的应用价值。
