冷原子干涉仪发展现状与应用分析
2020-04-17陈福胜
陈福胜
(华中光电技术研究所,武汉430074)
0 引言
干涉是物理学中最重要的概念之一,是所有波动理论的标志性特征[1]。从同一源发出的波在经历不同时空路径后由于感受到的作用量不一样,在重合时会产生分布呈周期性变化的现象即为干涉。从第一个确认光波动性的杨氏双缝干涉实验[1-2],到Michelson-Morley干涉实验否定 “以太”的存在[1-2], 再到分别以电子[3]、 中子[4]、 原子[5-8]甚至C60等大分子[9]为干涉物质的物质波干涉仪的突破性实现,干涉不断地为人们带来认识自然规律的新视角,加深了人们对自然规律的理解[10-11]。同时,作为一种技术手段,干涉还可以提取物质所经历时空路径上的信息,被广泛地应用于自然科学的不同领域[1-2,10-20]。
现代原子物理学提出的冷原子干涉仪[10,12-14]就是利用原子的物质波特性,通过光与原子的相互作用操控原子的物质波经过不同时空路径后汇合发生干涉的物理装置。由于冷原子具有很小的速度和速度分布以及良好的相干性,冷原子干涉仪可以达到很高的灵敏度[10,12-14]。 理论计算表明,在相同的几何条件下,由于原子的质量较光子运动质量大,原子干涉仪的精度比光学干涉仪高了10个量级以上。即使考虑到光学干涉仪的环路面积一般较原子干涉仪高4~5个量级,相位灵敏度高1~2个量级,原子干涉仪的精度也较光学干涉仪高3~4个量级。此外,由于原子具有内部结构和能级,并且具有质量,其干涉现象还受到能级跃迁、惯性及引力的影响,这使原子干涉呈现出远比光子或电子与中子干涉丰富的内容,目前被广泛应用于基础物理探索、物质材料特性研究以及惯性测量领域。
经过近30年的发展,目前冷原子干涉仪正在向高精度、小型化、工程化方向发展。本文首先介绍了原子干涉仪的基本原理,并在此基础上详细介绍了其在重力仪和陀螺上的应用。
1 原子干涉仪原理
原子干涉的理念可以追溯到量子力学的诞生时期。1923年,de Broglie提出有质量的粒子也可以具有波动性质,其波长由粒子的动量决定[2],为原子的干涉奠定了基础。第一个原子干涉的示范实验是1950年Ramsey[21]在分子束共振中引入分离场实现的,证实了原子干涉的可能性。1988年,Pritchard等[22]用激光实现了原子干涉仪的分束仪,演示了原子束从驻波场的Bragg散射。1991年,四个小组用不同的方法实现了第一个原子干涉仪:原子的杨氏双缝干涉仪[5]、使用三个纳米材料光栅的Mach-Zehnder干涉仪[6]、使用四束行波测量Sagnac效应的 Ramsey-Bordé干涉仪[7]和用三束激光实现的双光子受激Raman跃迁测量重力的Mach-Zehnder干涉仪[8]。
要实现原子干涉,必须解决原子的分束、反射和合束。目前,原子干涉仪主要有两种实现途径。一种是跟光学干涉仪相似,利用原子在周期性光栅中的衍射实现原子的分束、反射和合束。无论是通过纳米光栅或周期性光场,原子动量态发生改变,最终合束后发生外态干涉。第二种途径则利用原子的内态进行干涉,在这种途径中,原子的空间分离通过原子内态发生改变时吸收或辐射电磁场的动量反冲实现。也就是说,原子的内态和外态自由度是耦合在一起同时发生变化的,即所谓的 “自旋-轨道耦合” (Spin-Orbit Coupling)[23]。
由于原子在纳米光栅中通过的效率较低,且光栅的刻蚀要求严苛,基于内态干涉的原子干涉仪一经实验演示即得到极大的应用和发展,目前已成为原子干涉仪的主流技术途径。本文主要介绍基于这一技术途径的原子干涉仪,外态干涉仪的原理和发展见文献[10]。近几年来,由于精度提升的迫切需要,基于超冷原子的外态干涉仪又逐渐成为研究的热点[13]。
1.1 基本原理
基于原子内态干涉的原子干涉仪的基本出发点是光可用于探测原子的运动状态。由于Doppler效应,原子运动速度的改变将引起与之发生相互作用的光共振频率的变化。考虑一个重力场中自由下落的二能级原子和一个竖直方向传播的光场的相互作用,由于原子做加速运动,光的频率必须以一定的变化率啁啾,才能始终和原子保持共振相互作用。当二能级原子的跃迁线宽远小于下落过程中的Doppler频移以及与光场相互作用的Rabi频率时,啁啾率就是一个很好的测量重力加速度值的物理量:加速度值的一点小小的改变就会造成光和原子不能严格共振,从而影响二能级原子数的互相转化。通过测量原子在激发态的布居数,也就提供了一种通过啁啾率测量加速度的方法。
接下来,大概估算下这种方法可能达到的精度。考虑一个可见光波段的原子跃迁,光和原子相互作用的时间为1s。这种情况下,由于重力加速度导致的Doppler频移大约为10MHz,而跃迁线宽受相互作用时间限制为1Hz。因此,10-7量级的重力加速度的变化即可导致光和原子相互作用不共振,从而影响发生跃迁的原子数。此外,通过多个原子同时下落的方式可以更精确地确定共振频率,提升该方法的精度。如果使用1×108个原子同时测量,在散粒噪声极限下,上述测量的精度可提升至10-11量级。
上述方法有两个致命的问题。第一,相互作用跟原子的初始速度密切相关。这就导致即使使用激光冷却过的冷原子团,真正对信号有贡献的原子只占很小的比例,从而限制了信号的信噪比。例如,利用激光冷却过的Cs原子,即便其温度达到1μK,也只有大约0.01%的原子对最终的信号有贡献。第二,需要光和原子一直保持相互作用,这是精密测量所忌讳的。一般来说,精密测量总是希望在一个无外界扰动的情况下进行。
上述两个问题可以通过在原子与光场脉冲式相互作用中间插入一段无相互作用时间来解决,这个方案是Ramsey分离场方法[21]的自然推广。在插入的无相互作用时间里,原子不受外界的扰动。在这种方案中,经过第一个驱动光场脉冲,原子被制备到两个内态的叠加态上。如果在经过中间自由演化后,原子的叠加态与第二个脉冲同相,原子就会全部转移到激发态完成跃迁。但是由于光场的反冲,原子在经过第一个脉冲后不同内态的动量也不一样,在自由演化中会发生空间分离。为了完成干涉,两个内态的原子在最后一个脉冲时必须在空间重合。因此,当必须考虑光场的动量反冲时,需要对Ramsey分离场法做一点改进,才能实现原子的干涉。
通过上面讨论可以看出,为了实现原子在最后一个脉冲时空间位置重合,必须引入一个能使原子反向的脉冲(序列),也就是光学干涉仪中的反射镜。在原子干涉仪中,反射镜一般通过π脉冲的方式实现。在一个π脉冲的作用下,原子两个内态发生交换,由于自旋-轨道耦合,动量也同时发生反转。如图1所示,结合前面描述的分束和合束,一个典型原子干涉仪π/2-π-π/2脉冲序列就这样被构建出来。图1中,实线为原子在没有重力作用时的轨迹,虚线为原子在重力场作用下的原子轨迹。
1.2 双光子受激Raman跃迁
考虑到原子在探测期间的相干性和避免磁场的干扰,一般选用碱金属原子基态能级上的微波钟跃迁I+1/2,mF=0〉作为二能级系统。为解决射频单光子跃迁引起的Doppler频移过小的问题,Chu和Kasevich在1991年提出用经由中间能级的双光子受激Raman跃迁来驱动碱金属原子在基态中的跃迁,如图2所示[8,24]。通过对射双光子受激Raman跃迁,原子不仅完成了内态之间的跃迁,同时还受到光场的反冲,反冲动量ћkeff=ћ(k1-k2), 其大小为ћkeff=ћ(k1+k2)≈2ћk1,2, 为单光子反冲的2倍,有效解决了射频单光子跃迁引起的Doppler频移过小的问题。不仅如此,通过这种方案,还可以降低对激光器频率(相位)稳定性的要求。如果是直接二能级跃迁,为了保证测量精度,必须要求激光的频率在整个干涉期间与原子跃迁保持同相。而在双光子受激Raman跃迁中,仅要求两束激光的频差在干涉期间与原子的射频跃迁保持同相即可。后者可通过拍频锁相等多种方式实现[25],大大降低了实验难度。
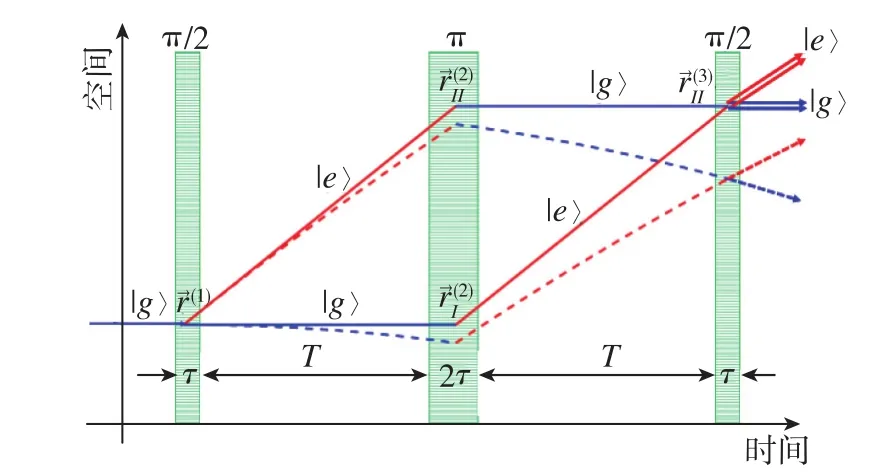
图1 典型三脉冲March-Zehnder原子干涉仪示意图Fig.1 Schematic diagram of a three-pulse March-Zehnder atom interferometer
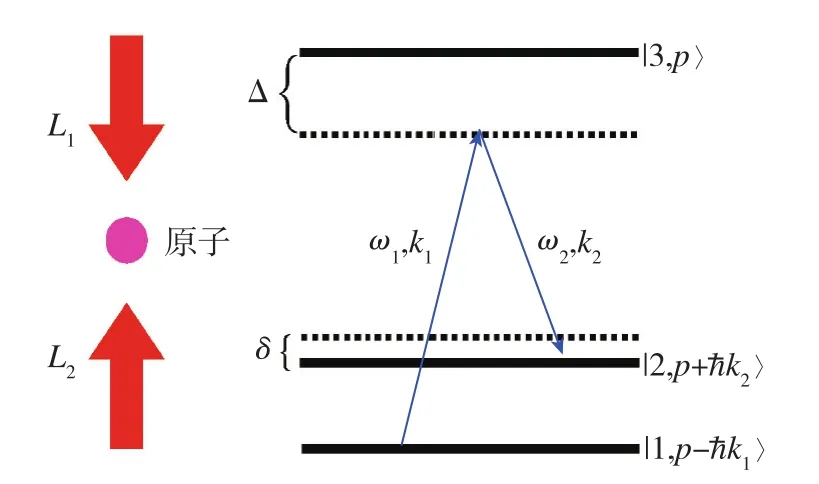
图2 双光子受激Raman跃迁能级示意图Fig.2 Schematic diagram of two-photon stimulated Raman transition
1.3 原子干涉相位分析
对整个干涉过程分析可知[10,12-14], 经过三个脉冲后,原子处于态的几率为

式(1)中,A为干涉条纹的偏置,C为干涉条纹幅度,ΦAI为原子干涉仪的相位。ΦAI为图1中上下两条路径上积累的相位差,一般可以分成三部分

式(2)中,Φprop为原子在外场中运动引起的相位变化,Φlight为与Raman光的相互作用,而Φsep则为原子波包初始空间位置不重合引起的相位差。由于外场的影响,从同一个位置出发的原子经过两条路径后不一定重合。为了使它们最后重合干涉,需要在初始时有一个位置差。
对原子在经典轨迹上的路径积分计算可以得到Φprop,对后面讨论的重力仪和陀螺来说,Φprop=0。此外,原子波包初始空间位置不重合引起的相位差Φsep一般来说是小量, 可以忽略不计, 而Φlight可以通过逐步分析干涉仪的每一个过程得到。初始态的原子经过第一个脉冲实现分束时,原子有一半的几率继续待在初态,有一半的几率发生跃迁而待在激发态。在激发态的原子同时获得激光的相位φ1,形成一个相干叠加态;当原子与第二个光脉冲作用时,原子正好感受到一个π的跃迁,原子布居数发生交换的同时均获得激光的相位φ2;当原子与第三个光脉冲作用时,初态的原子有一半的几率继续待在初态,有一半的几率发生跃迁而待在激发态;同样,激发态的原子有一半的几率继续待在激发态,有一半的几率发生跃迁而待在初态,它们均获得激光的相位φ3。因此,原子经过三个Raman脉冲作用后,原子内态为初态和激发态的相干叠加态,原子在初态或激发态的几率为

从式(3)可以看出,Raman光的相位参与到原子内态的布居数变化上。当扫描任意一个Raman光相位时,可以得到原子干涉条纹。虽然式(3)看起来与经典的测量加速度没有什么区别,都是通过测量物质经过一段时间后运动的距离来计算其运动信息,但还是要注意到,原子干涉仪的基本出发点是Doppler效应,这里相位的变化是由频率变化引起的。
对光和原子相互作用时的相位分析可知[10,12-14], 当外场是重力场、 旋转场或二者之和时,原子干涉相位可以表示为

因此,当初始速度与激光传播方向都竖直向下时,可以直接测量重力加速度,构成原子重力仪[26];若要测量旋转角速度,可以通过两个初始速度相反的原子干涉仪组合进行[27]。
2 原子干涉仪应用
根据上述原理,原子干涉仪的干涉相位跟原子的加速度和角速度相关,可以用于测量原子的惯性信息。因其理论精度较光学干涉仪高3~4个量级, 在重力仪[18,26,28-36]、 陀螺[27,37-40]等惯 性测量领域得到了广泛应用。通过两个重力仪比较,还可以测量重力梯度[41]。由于通过共模方式消除许多噪声的影响,原子干涉仪也是一种重要的重力梯度测量仪器。此外,在基础科学领域,原子干涉仪也被广泛的应用于(弱)等效原理验证[20,42]、Newton 引力常数测量[19]以及引力波探测[43-44]等领域。
这一章节将介绍冷原子干涉仪在重力仪和陀螺上的应用,重点放在原子重力仪的发展历程上。由于重力仪已经出现工程化商业产品,其发展趋势是值得重点关注的。
2.1 重力仪
早期原子重力仪处于技术探索阶段,研究工作在实验室内部开展。由于系统的复杂性,使得体积和质量都非常大,因此只能用于室内重力的监测和绝对重力的标定。1992年,美国Stanford大学的Chu小组[26]研制了第一台原子喷泉式重力仪。1999年,该小组的Cs冷原子重力仪灵敏度达1×10-8g·Hz-1/2, 精度达 3×10-9g[28], 获得接近当时重力测量最高精度结果。
第一台原子重力仪实验装置相当庞大,且系统非常复杂。为实现原子重力仪在室外实地测量,2010年后众多实验室开始在原子重力仪的工程化、减小体积和提升系统稳定性上着力研究,目前已开展了重力仪的搬运实验。
2013 年, 德国 Humboldt大学 Peters小组[29]的可移动原子重力仪GAIN(the Gravimetric Atom Interferometer)的实物图如图3所示,整套系统由两个19英寸机柜和一个包含超高真空系统的探头组成。两个机柜分别用于放置激光和光路系统、电子和控制系统,将激光器及光学器件集成到标准19英寸机箱内,全部采用模块化设计,不同功能模块之间采用隔板隔开,减少彼此之间的影响,提高了光路稳定性。光学器件也进行了小型化的设计,光路的光高只有2cm,并减少可调节器件的使用。可移动原子重力仪的探头部分固定在铝型材支架上,可看出采用了原子上拋式的设计。干涉区安装了磁屏蔽结构,消除了外界磁场对系统的影响。另外,该系统配备了主动反馈式的隔振平台,用来消除振动噪声的影响。GAIN的重力测量灵敏度可达 30μGal·Hz-1/2。

图3 Peters小组研制的可移动重力仪GAINFig.3 Mobile gravimeter GAIN developed by Peters Group
法国巴黎天文台LNE-SYRTE实验室研制的可移动原子重力仪[31]如图4所示,整套系统分为两个部分:光路和电路系统、重力仪探头,分别固定在两个铝型材框架中,底部配有福马轮,便于系统的搬运和移动,外形尺寸在图中已标注出。这套原子重力仪的特点在于探头部分的设计,首先整个真空腔体都放在圆柱形的磁屏蔽筒中,基本消除了背景磁场对重力仪测量的影响。其次,该系统采用了被动隔振平台和地震仪配合使用的方案,能抑制掉大部分的高频噪声,剩下的低频噪声由探头顶部的地震仪采集到,再通过后期数据处理将ΔΦ补充到干涉仪相位中去。对室外测量来说,地面振动是原子重力仪灵敏度的主要噪声来源,因此通过该设计可大大提高重力测量的灵敏度。该套原子重力仪搬运到法国的山洞实验室(LSBB)进行过测量,在没有任何隔振的条件下,100s测量时间内的短期灵敏度可以到达1μGal。2018年,该小组报道的原子重力仪采用了BEC制备技术,不确定度已达1μGal。

图4 法国巴黎天文台LNE-SYRTE实验室研制的可移动原子重力仪Fig.4 Mobile atom gravimeter developed by LNE-SYRTE
法国巴黎天文台LNE-SYRTE实验室和LP2N合作研制了一套高精度的便携式绝对原子重力仪[30],被称为 “MiniAtom”。这套方案的精妙之处在于一个中空角锥的使用[45],只需要单束激光便可完成原子的冷却、干涉和探测过程,大大的简化了系统的体积和复杂程度。图5展示了装置的整体结构并给出了探头的实物图,该探头的高度只有40cm,这种独特结构有利于提高系统的稳定性。MiniAtom的预期测量灵敏度为 10μGal·Hz-1/2,如果这一目标实现的话,将会给原子重力仪带来广阔的应用空间。

图5 法国LP2N研制的便携式绝对原子重力仪Fig.5 Portable absolute atom gravimeter developed by LP2N
此 外, 英 国 Birmingham 大 学[32]、 德 国Hannover大学[33]、 新西兰 Otago 大学[34]、 美国 California大学Berkeley分校[35]等多家单位也在从事冷原子绝对重力仪的研究,以提高其精度和环境适应性。英国Birmingham大学已尝试将芯片MOT用于原子重力仪中[32],这有助于简化设备。目前,该样机已实现干涉,整机功耗仅为162W。德国Hannover大学尝试将芯片制备BEC技术[33]应用于新研制的QG-1原子重力仪中,其设计不确定度可达亚微伽(<μGal)量级水平。 新西兰 Otago 大学[34]与美国California大学Berkeley分校[35]均在探索原子重力仪的新方案,以减小其体积,增加其灵敏度和抗振能力。美国California大学Berkeley分校负责研发原子重力仪的是Müller团队,其研发的基于Raman光的原子重力仪灵敏度可达37μGal·Hz-1/2, 精度可达 2μGal。 2019年, 他们开展了该原子重力仪的车载实验[35],如图6所示,外场测试不确定度可达0.04mGal。此外,他们还通过将原子囚禁在光晶格中的方法延长干涉时间达20s[46], 从而抑制振动的影响。

图6 Müller团队原子重力仪外场测试行车路线图和设备照片Fig.6 Road map and equipment photo of atom gravimeter field test developed by Müller Group
近期,原子重力仪研究发展到动态测量装备试制阶段。2018年,法国国家航空航天研究中心(ONERA)实现了在海船平台上原子重力仪测量绝对重力的实验[36],使用的原子重力仪如图7所示。该原子重力仪在静态环境下的灵敏度为0.8mGal·Hz-1/2,受限于力平衡加速度计的灵敏度。经评估,测量 不 确定 度为 0.06mGal(t= 39ms)或0.17mGal(t=20ms)。 ONERA 原子重力仪的海洋重力测试实验实施了以航速8节~11节的直线、环形航行,航行过程中原子干涉积分时间选为t=10ms或t=20ms, 数据输出率高于 10Hz(t= 20ms),测量结果的均方根、误差均优于1mGal。测试实验结果与卫星测高重力模型偏差平均值为1.4mGal,均方差为2.4mGal,符合原子重力仪误差和卫星测高误差估计结果,比商用海洋重力仪(KSS32M)的精度高了5倍。

图7 法国ONERA的海上原子重力仪Fig.7 Atom gravimeter installed in a ship for marine measurement developed by ONERA
在各研究单位的工程化研究积累下,目前美国的AOsense公司和法国的Muquans公司已具有成熟的商用原子重力仪产品。AOsense公司生产的原子重力仪只提供给美国军方使用,所以具体参数信息未知。Muquans公司的原子重力仪[47]的探头尺寸高度为70cm,直径为38cm,激光和控制电路的尺寸为100cm×50cm×70cm,重力测量灵敏度为50μGal·Hz-1/2, 精度为几个微伽(μGal)。
2.2 陀螺
早在1988年,Clauser就通过计算指出了利用原子干涉测量角速度的优势[48],1991年实现的原子干涉仪中也观测到了陀螺效应[7],然而真正的第一台利用原子干涉测量角速度的原子干涉仪在1997年才实现[49]。利用热原子束通过空间分离的激光光场,他们测量了地球的自转,其精度达到了 2×10-8rad/s/Hz1/2。 2000 年, 通过两束热原子对射的方式, 精度提高到了 6×10-10rad/s/Hz1/2,达到了当时陀螺的最高精度[27]。自此,对原子陀螺的研究慢慢提上了原子物理学家的日程。
原子干涉陀螺的发展也经历了原子重力仪类似的历程。2000年后,法国率先使用冷原子团研制原子陀螺。由于冷原子具有很小的速度和速度分布以及良好的相干性,其很快成为原子陀螺的首选。2010年后,原子陀螺的发展进一步加速,正在往小型化、工程化、集成化的道路前进。
2014年,美国Sandia国家实验室在Lockheed Martin公司的资助下,研制了新一代高带宽干涉式原子陀螺[50],如图8所示,整个石英腔体内径尺寸为20mm×30mm×60mm。其最大创新之处是冷原子团抛射到对向的MOT再囚禁,对抛冷原子团的重复利用,再加上超短的原子干涉时间,干涉仪带宽达60Hz。最终,装置对转动测量的灵敏度为1.1μrad/s/Hz1/2, 对 加 速 度 测 量 的 灵 敏 度 为0.9μg·Hz-1/2。 但此陀螺的干涉环路面积只有0.4mm2,限制了其极限精度。

图8 美国Sandia国家实验室的小型化高带宽原子陀螺Fig.8 Miniaturized high-bandwidth atom gyroscope developed by Sandia National Laboratory
2016年,法国巴黎天文台LNE-SYRTE实验室首次实现了连续抛射式四脉冲原子陀螺[38],消除了从冷原子制备到干涉以及干涉到探测期间旋转信息丢失的死区时间,如图9所示。在20000s的测量时间内, 零偏稳定性可达 2×10-4(°)/h。 2019年, 通过优化进一步将精度提升到了 6×10-5(°)/h,该陀螺已是目前世界上长期稳定性最好的冷原子干涉陀螺[39]。
图9 法国巴黎天文台的连续抛射式无死区原子陀螺Fig.9 Interleaved gyroscope without deadtime developed by LNE-SYRTE
3 结论
通过上述原子重力仪和陀螺的发展历程,可以发现其发展主要经历了三个阶段:第一阶段为2000年以前,为原子物理学家对干涉式原子惯性测量理论和实验的探索阶段,从物理原理与数学推导论证了干涉式原子重力仪、陀螺的可行性;第二阶段为2000年—2010年,各国原子物理学家在实验室研制了原子惯性测量样机,以验证干涉式原子惯性测量装置的理论精度;第三阶段为2010年以后,激光工程师、光学工程师、电子工程师开始研制可工程化实现、面向应用需求的干涉式原子惯性测量仪器。
目前,虽然除冷原子重力仪外,其他的惯性传感技术还大多处于概念阶段,各种技术路线尚有诸多不确定性,大多处于实验室原理样机阶段。但美国、法国等少数几个国家逐步解决了冷原子干涉系统的长期稳定性和集成问题,正着力于攻克高动态范围和微小型化等应用难题,说明其技术已进入工程实用化阶段。此外,除原子传感器系统本体部分的微小型化方法和设计之外,原子传感器关键部件及其微小型化设计也是他们重要发展的支撑和解决方案[40]。我国在冷原子干涉式传感器技术领域起步较晚,尤其是对于微小型化的研究才刚刚开始,理论与实验基础研究经验不足。对于我国而言,加速开展冷原子干涉仪技术研究对未来高性能武器和宇航领域惯性技术的创新发展具有重要意义。关注目前美、法等国的主要研发目标,瞄准其未来的发展趋势,对实现基于冷原子干涉式传感器技术的弯道超车具有重要意义。
