无人机身份识别系统设计
2020-04-16周振雄刘丙申王文保
周振雄,刘丙申,王文保,王 娟
(北华大学电气与信息工程学院,吉林 吉林 132021)
近年来,无人机“黑飞”问题日趋严重,已经出现了十几起严重影响到人们正常生活的“黑飞”事件,造成了相当恶劣的影响.由于无人机系统中没有身份识别模块和与之对应的监控主站,因此,不能准确定位无人机飞行区域及判断无人机飞行轨迹是否合法.为了协助监管,本文设计了一种无人机身份识别系统.在分析葛银杰[1]提出的POI过滤法、俞侃[2]的改进数据检测流程、宋建华[3]提出的自调整混合树防碰撞算法和邓红卫[4]逆向利用基本二进制算法搜索的基础上,在与机载身份识别模块对应的监控主站内,改进传统的四叉树防碰撞算法,以提高系统的防碰撞性能,减少查询数量和传输比特数,提高吞吐率.通过搭建仿真试验平台,验证本文所设计系统的可行性.
1 识别系统
为了便于空中交通管制,本文基于射频识别技术与无线传输技术,提出无人机身份识别系统,该系统由机载身份识别装置与监控主站构成,见图1.机载身份识别装置采用如下模块搭建:机载身份模块用于存储无人机身份码,检测无人机当前位置、高度,并将这些信息定期发送给监控主站.机载身份识别装置由STM32主控板、GPS模块、GSM模块及RFID模块组成[6].STM32主控板为系统核心部件,无人机的身份码与飞行信息都存储在STM32主控板的存储器中.
机载身份识别装置GPS模块采集无人机的位置坐标、航向、航速等信息,并通过串行接口传送给STM32主控板.无人机高度由气压高度计模块检测,并通过I2C总线传给STM32主控板[7].机载身份识别装置的WIFI模块与主控板采用串口方式连接,用于发送无人机相关信息.此外,机载身份识别装置集成RFID模块,用于和监控主站及警用设备通信.机载身份识别装置采用间歇式工作方式,每秒发送1次信息,其他时间系统处于休眠状态,以降低能耗,同时也降低了监控主站对容量的要求.
监控主站由STM32主控板和WIFI模块组成.当无人机进入监控主站监控范围时,阅读器读取到无人机RFID标签数据,监控主站WIFI模块对机载WIFI模块发出传输信号,无人机的身份信息及当前飞行状态信息都会通过机载WIFI模块传输至监控主站,监控主站将信息打包传输至上位PC机进行进一步处理.
无人机位置信息采用三角测量法测量,见图2.根据第一距离、第二距离、高度和无人机两个接收端之间的距离采用三角测量原理计算所述投影点在所述接收坐标系中的坐标,获得接收投影点坐标,根据地理坐标位置和接收投影点坐标位置计算无人机地理位置.
图3为无人机飞行区域判定流程,系统采用以下步骤判定无人机是否违法:
步骤1.获取安装在无人机上的机载信息收集端检测到的角加速度、角速度、航向、高度、身份识别码.
步骤2.通过两个接收端接收无人机发射的无线信号时间,获得接收时间.
步骤3.根据接收时间及传输信号波长与频率的乘积获得波速,根据波速与时间乘积,获得第一距离和第二距离.
步骤4.根据第一距离、第二距离、高度和两个接收端之间的距离,采用三角测量原理计算无人机的地理位置.
步骤5.由无人机地理位置确定无人机的飞行区域,根据身份识别码确定国家规定的无人机飞行区域、飞行角加速度、飞行角速度和飞行航向.
步骤6.判断无人机飞行区域是否在国家规定的飞行区域内,如果在,执行步骤7;如果不在,确定无人机违法.
步骤7.判断角加速度、角速度、航向是否符合飞行角加速度、飞行角速度、飞行航向,如果是,确定无人机不违法;如果不是,确定无人机违法.
2 改进四叉树算法
射频识别技术是一种非接触式的自动识别技术,倘
若待识别标签距离识别器较远,或多个待识别标签在一个阅读器的读取范围内,难免会产生误读或漏读.由于本系统中的无人机身份识别码是一机一码,通过识别码可以确定无人机持有者的信息,因此,对RFID防碰撞算法进行优化,避免发生误读.
传统的防碰撞算法未对标签进行处理而直接识别[9-10],在实际应用中,若阅读器内出现一些相同位的标签,直接识别会产生大量非必要比特被传输的情况,增加通信消耗,延长识别时间.随着无人机使用频率的逐渐增高,针对多架无人机在同一个监控主站监控范围内飞行的情况,若不采用多路访问机制,多个无人机可能同时响应发出的指令,产生RFID频道争用的问题,造成干扰[5].因此,对四叉树防碰撞算法进行改进,将标签中的碰撞位提取并整理成新的可分类ID,并在四叉树识别过程中加入“异或”命令运算,有选择地向标签发送前缀.与之前技术相比,可以避免大量空闲时隙,提高了识别效率.改进算法流程见图4.
图4中,REQUEST为阅读器请求命令,DH表示当前两碰撞位的最高位.
提取所有的碰撞位组合成新的标签,再采用高效率动态四叉树识别,可以提高效率,减少传输比特数和空时隙数[8].
可以得到识别全部无人机的查询数量sum为
查询时隙数:假设识别范围内有S个待识别无人机,l叉树,p(l)和p(k)分别表示查询深度为l和k时的识别概率,则
p(k)=[1-p(l)]k-1.
查询深度均值为
可得平均时隙数为
通过平均时隙数可以算得二叉树搜索的平均时隙数为
四叉树的平均时隙数为
通过比较可知:当S大于3时,四叉树的性能会优于二叉树,S越大,识别效率越高.
改进查询树算法与传统算法比较见图5.图5中,蓝线表示传统查询数算法不同标签个数的查询数量,红色线表示改进后的防碰撞查询数量.由图5可见:与传统算法相比,改进后的查询数量大幅度减少,节省了阅读器工作时间,延长了使用寿命.
3 试验结果
在MATLAB软件上将改进四叉树算法与后退式二进制算法和自适应算法进行仿真对比分析.设仿真条件为8位标签,取50次测试平均值.图6、图7、图8分别为改进查询树算法、后退式二进制算法和自适应算法的查询数量、传输比特数、吞吐率对比曲线,通过对比可以直观比较算法的性能.由图6~8可见:当监控主站面对100个标签时,改进查询树算法的查询数量为101.7次,传输比特数为273,吞吐率为0.724;后退式二进制算法查询数量为176.4次,传输比特数为1 126,吞吐率为0.579;自适应算法的查询数量为221次,传输比特数为1 496,吞吐率为0.514.改进的查询树算法的查询数量和传输比特数小于后退式二进制和自适应算法,而吞吐率比后退式二进制算法提高了25.04%,比自适应算法提高了40.85%.由此可知,改进的查询树算法具有更高的效率和性能.

图7传输比特数对比Fig.7Comparison of transmission bit number 图8吞吐率对比Fig.8Comparison of throughput
搭建试验平台进行测试分析.结果显示,当无人机身份识别模块进入监控主站识别范围时,监控主站将进行无人机信息识别并发送到上位机,验证了系统的可行性.
测试1个监控主站同时识别多个无人机识别码情况下的识别性能.以20个8位数身份识别码为例,在不同空间位置同时将识别码接入阅读器识别范围,结果阅读器在0.02 s内识别到与标签内容完全相同的识别码(见表1).由此表明,系统快速性良好,且识别效率高.
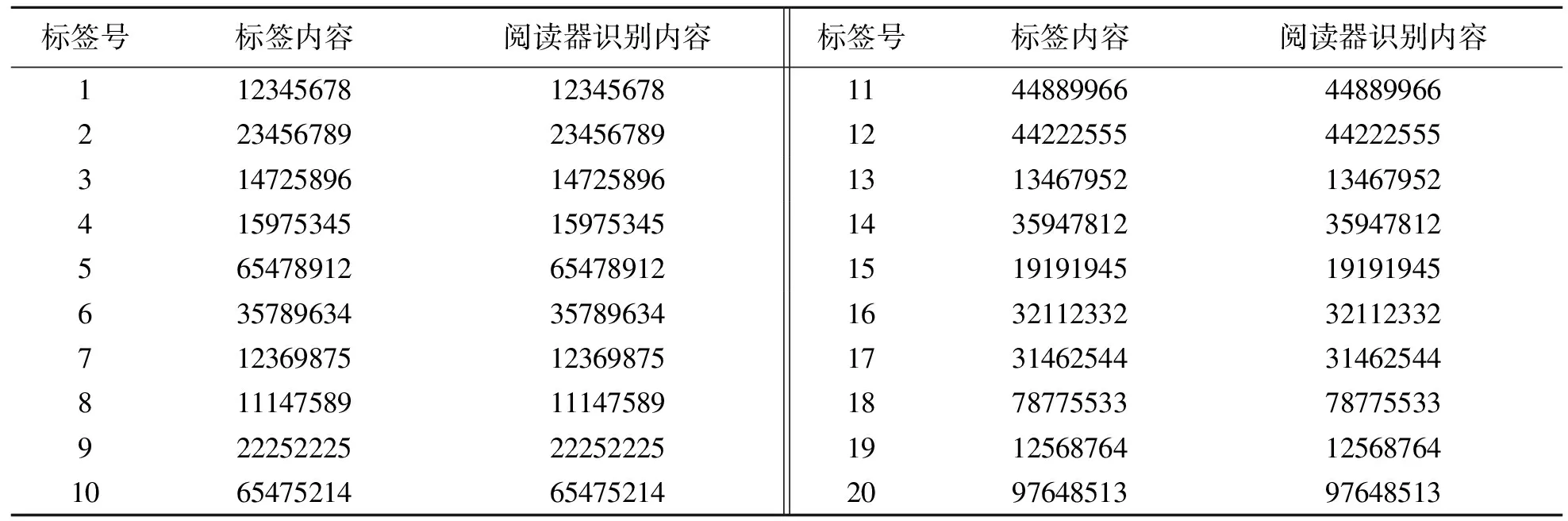
表1 20组标签内容与识别内容对比Tab.1 Comparison of label content and identification content of 20 sets
4 小 结
本文将RFID和WIFI传输融入到无人机身份识别模块,提出了无人机身份识别系统的设计方案.针对1台监控主站可能同时面对多架无人机产生RFID数据造成的误读、漏读问题,提出了改进四叉树防碰撞算法.该模型与传统防碰撞算法相比,具有更高的工作效率、更少的非必要比特传输数.通过对20个身份标签进行数据读取试验,验证了系统的可行性与高效率.
