皮带输送机软启动装置及其控制系统的设计
2020-04-15安振军
安振军
(山西省大同煤矿集团公司同家梁矿,山西 大同 037003)
引言
皮带运输机在煤矿生产中被广泛应用,其将朝着大运量、长距离以及高功率的方向发展。在实际应用中,皮带输送机不可避免地会遇到满载或者带负载启动,采用传统的启动方式会对设备造成一定的冲击,还会对工作面电网造成冲击,继而影响工作面其他机电设备的运行[1]。因此,皮带输送机带负载启动采用传统启动方式会影响工作面机电设备的使用寿命。故,有必要将软启动装置应用于皮带运输机中。本文将对以行星差动轮系为核心的软启动装置的控制系统进行设计。
1 软启动装置结构分析
鉴于皮带运输机在带负载启动所遇到的问题,本文以行星差动轮系为机械软启动装置,实现对该软启动装置的机电结合的软启动控制方式。所谓机电相结合的软启动控制方式为一种机电一体化的控制系统,该控制系统集合了当前传感器技术、电子控制技术和机械控制技术为一体机的控制技术,其主要包括有机械部分和控制系统[2],如图1 所示。

图1 机电结合的软启动装置控制框图
如图1 所示,软启动装置机械部分主要由电机、传动机构和调速电机组成;控制系统主要由PLC 控制器、上位机以及变频器等组成。其中,该软启动系统的机械部件核心为行星差动轮系和调速电机,控制系统核心为PLC 控制器和变频器。
2 软启动装置机械部件的设计
2.1 软启动装置行星差动轮系的设计
皮带运输机软启动装置机械部件的核心为行星差动轮系,其传动原理如图2 所示。
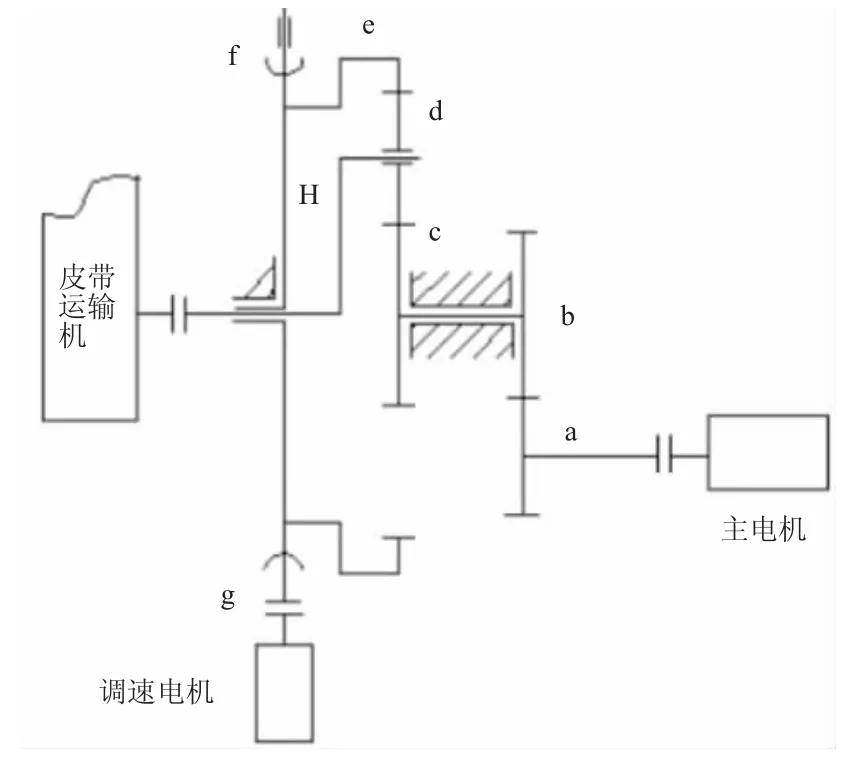
图2 行星差动轮系传动原理图
根据皮带运输机的运输要求,设计对应软启动装置各级齿轮及零部件的相关参数。本文所研究的皮带运输机的运速为4 m/s,驱动滚筒的直径为1 436 mm,对应皮带运输机电机的额定功率为1 500 kW,其额定转速为1 000 r/min,当皮带运输机处于满足运行工况时,其对应电机的转速为985 r/min,输出轴的转矩值为2.0×105N·m,此时对应至驱动滚筒的转动惯量值为1.029×105kg·m2。

行星差动轮系的输出轴与皮带运输机滚筒相连接,根据皮带运输机的工作情况得出滚筒的转速为:式中:v 为皮带运输机的带速,取4 m/s;D 为驱动滚筒的直径,取1 436 mm。将数值代入公式计算得n1=53.23 r/min。
对应皮带运输机在满载工况下启动时,行星差动轮系的传动比为:

式中:n 为皮带运输机在满载工况下对应电机的转速,取985 r/min;n1为皮带运输机所需滚筒的正常转速,取53.23 r/min。经换算可得,差动轮系的减速比为18.51。
为满足皮带运输机的重载运输要求,避免其在传动过程中轴向力对系统造成的冲击,该软启动装置采用人字齿轮传动,并采用蜗轮蜗杆的传动方式对皮带运输机的调速电机和主电机进行调速控制[3]。
2.2 软启动装置调速电机的选型设计
皮带运输机共包含有主电机和调速电机两个电机。其中,主电机主要承担皮带运输机的负载,为其提供相应的功率;调速电机只应用于设备在带负载启动时,根据负载大小实时对调速电机的转速进行控制。

本文采用变频控制原理对调速电机转速或功率进行控制。经研究可知:调速电机与主电机的功率比如式(3)所示:式中:f 为基频,取50 Hz;f'为调速电机在最大转速下对应的频率值;P'为调速电机的实时功率值,一般将P'控制在300 Hz 为最佳;P 为主电机的功率值。
结合皮带运输机主电机功率为1 500 kW,经换算可得对应调速电机的额定功率值为250 kW。经查阅相关手册,最终选型调速电机的型号为Tk280-20/1210,该调速电机对应的其他参数如表1所示。

表1 Tk280-20/1210 调速电机的关键参数
3 软启动装置控制系统的设计
为保证以行星差动轮系为核心的软启动装置能够真正解决皮带运输机带负载或重载启动所遇到的问题,本文采用以PLC 控制器和变频控制器为核心的控制系统实现对皮带运输软启动功能的控制。具体控制原理如下:控制系统通过对皮带运输机现场传感器所采集到的设备运行参数信息进行分析,将所得采集参数在上位机显示的同时得出对应的控制策略,通过变频器对皮带运输机调速电机进行控制,从而实现了皮带运输机在重载状态下的软启动[4]。
3.1 软启动装置控制系统的硬件设计
软启动装置控制系统的关键硬件包括有PLC控制器、变频器以及调速电机。
3.1.1 PLC 控制器的选型
PLC 控制器的选型需综合考虑其现场控制设备输入输出点数、可靠性、适应性、功能模块化以及成本等因素。根据皮带运输软启动控制的功能要求,选用S7-200 系列的PLC 控制器。结合现场控制所需采集参数数字量、模拟量的个数以及控制参数的个数,对应型号为6ES7216 的CPU 模块共包含有24个输入点、16 个输出点,满足皮带运输机带负载软启动的控制要求。
3.1.2 变频器的选型
结合PLC 控制器和调速电机的选型结果,本控制系统选用西门子公司的MM420 通用变频器对调速电机的转速进行控制。为精确获取调速电机的转速,实现对调速电机的控制,本控制系统采用HKX101S 系列霍尔翼片式传感器对调速电机的转速进行采集。
3.2 软启动装置控制系统的软件设计
PLC 控制器为软启动装置控制系统核心,其通过接收主电机转速传感器、输出转速传感器所采集到的参数信息以及其得到的软启动、软停车以及紧急停车等信息对变频器进行控制,从而对调速电机进行控制,最终实现对皮带运输机传动机构的控制[5]。因此,对于皮带运输机软启动装置的启动程序而言,其对应的程序流程图如图3 所示。
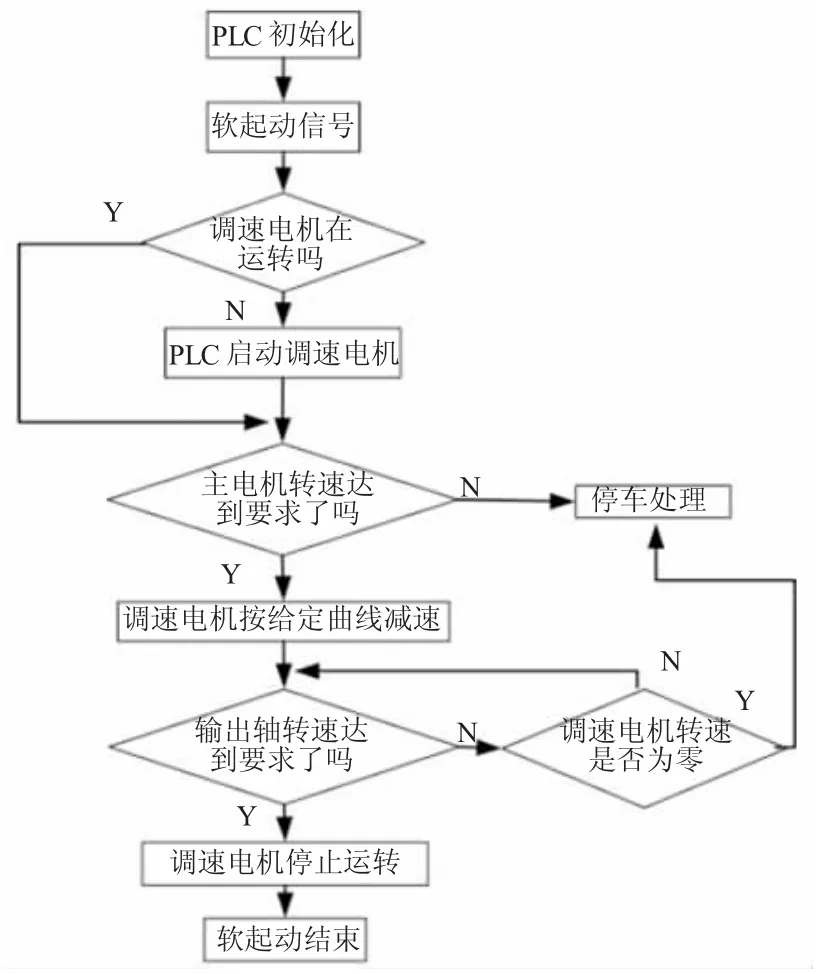
图3 软启动装置软启动程序设计
如上页图3 所示,软启动装置控制系统的核心在于通过PLC 对变频器实现对调速电机转速的控制,进而带动主电机的转速的控制,使得主电机转速满足实际生产需求,并根据实时工况采用给定曲线完成对调速电机的加速、减速控制。
4 结语
皮带运输机作为综采工作面的关键运输设备,为避免其在带负载或者重载启动工况下对皮带运输机甚至其他综采设备造成的冲击,采用以行星差动轮系为软启动装置的软启动系统实现对皮带运输机重载或带负载启动阶段的控制,其控制核心为通过PLC 对所采集数据进行处理得出对应的控制策略,通过系统中变频器实现对调速电机的控制,从而带动主电机的转速,最终实现皮带运输机的软启动功能。