浮球式控制器的设计
2020-04-15刘清文
刘清文
(河南工业职业技术学院机械工程学院,河南 南阳 473000)
1 现有控制方案
自动上水控制器是以水位检测装置[1]为核心,综合了基础电路技术和控制系统[2]的一种通用家庭自动控制装置,应用于城郊以及农村家庭供给日常用水。由于水泵的工作特性,导致使用结束时必须断电,虽然市面上已经推出了自动上水控制装置,但是实际应用中生产成本较高,安全性与稳定性有所欠缺,故而对自动上水控制器进行了重新设计,降低生产与生产与改造程本,并将水电进行分离,从而达到安全使用的目的。
1.1 方案一:PLC+水位探针设计
通过在水箱中安置电子水位传感器,通过传感器不同节点与水接触从而判断水位高低[3],PLC 控制原理示意图如图1 所示。

图1 PLC 控制原理示意图
优点:可以使用户对水箱内的水位有较为明确的认识。
缺点:水箱内需要放置通电的水位监测传感器,长时间使用保护套易发生老化腐蚀;水位传感器可适用的水位深度范围较为固定,当用户对用水量需求较大时不能很好的满足用户需求;进行水箱改造成本较高。
1.2 方案二:摆臂浮漂设计
通过在水箱中放置摆臂浮球,根据浮球摆臂的角度从而判断水位高低[4]。摆臂浮球原理示意图如图2 所示。

图2 摆臂浮球原理示意图
优点:用户改造成本较低。
缺点:受限于水箱直径限制,摆臂活动范围受限,进而导致每次上水量有所限制;水箱内浮球中通强电,长期使用无法保证浮球密闭性,存在一定的安全隐患;浮球长时间在水中使用会导致内部触电接触不良,引起无法给水泵通电或者断电的故障。
2 优化设计方案
2.1 设计原理
通过在水箱中安置垂直移动的浮球,将水位信息反馈给控制器,由控制器对水泵进行通断电控制。
优点:用户改造成本低;强电弱电分离,保证使用安全;可根据用户用水量需求调整水泵抽水量,提高了产品的适用性。
经过对已有方案与优化方案的比较可知,方案一中因为对已有上水系统需要改造内容较多,导致改造费用与后续维护成本较高,且水位传感器长度固定,不能满足不同用户对储水量的要求;方案二由于是根据浮球摆臂角度判定水位高低,所以存在着摆臂过长或者过短,进而导致水泵频繁工作,降低水泵寿命,且水箱内通强电,一旦发生漏电现象后果将十分严重。优化后采用浮球垂直移动位置进而判断水位高低,可以更加精确的对水箱内水位进行控制,从而避免了水泵的频繁工作,同时水箱内没有通电设备,保证了长时间使用的安全性。浮球+控制器原理示意图所图3 所示。

图3 浮球+控制器原理示意图
2.2 硬件配置设计
优化后设计方案是一种电磁式上水控制器,其电路结构如图4 所示。水位控制器控制接触器线圈的通电与否,接触器安装在水泵与电源之间,对水泵的工作状况进行控制。
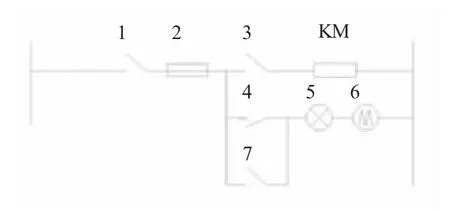
图4 电磁式自动上水器的电路结构示意图
为了显示正在上水,在水泵供电电路中加入通电警示器,如指示灯、或电铃。在自动系统出现故障时可以选择手动进行上水以及断电操作。
水位控制器工作原理:水箱内浮球自身的重力与细绳的拉力(由弹簧拉伸后的形变提供)以及水箱内水提供的浮力三力平衡,使得浮球能够漂浮在水箱内的水面上并收紧细绳,其结构如图5 所示。绕线轮锥形齿轮采用同轴联结,在工作时候同步转动,绕线轮对细绳进行收紧或者放松操作;锥形齿轮与齿轮也采用同轴联结;绕线轮通过弹簧提供的拉力完成对细线的卷曲,使系统时刻处于动态平衡状态。图5 中深黑色部分为通电线路。当环形回路中金属触头与金属板(环形回路中共色部分)接触时,整个系统通电,水泵开始抽水工作;当金属触点与金属板断开时,整个系统断电,水泵停止抽水工作。由于整个水位控制器安置在水箱上方外侧的封箱中,并不会与水源进行直接接触,因此绕线轮、锥形齿轮、锤形齿轮、齿轮、齿条、环形回路均采用ABS 材质制作即可满足使用要求。齿轮啮合部分可以使用少量油脂进行润滑,以保证长时间使用的稳定性。浮球因为要长期与水源直接接触,因此应采用无毒塑料制作,内部安置的有配重块,保证整个系统始终处于平衡状态。

图5 水位控制器的结构示意图
环形回路具体结构如图6 所示,整体为椭圆形,内部有两条凹槽滑道,图5 中的触头在滑道中做来回的椭圆运动,凹槽内的滑道分为上下两部分。上半部分没有安置金属板,为断电部分,该阶段的滑道部分为左侧高右侧低;下半部分安置的有金属板,为通电部分,该阶段的滑道部分为左侧低右侧高。图5 中触头始终在环形回路的滑道中做椭圆往复运动,历经断电通电循环,从而对接触器进行通断电的控制。该环形回路因为是安置在水箱上方的密闭空间内,所以采用ABS 材质制作即可满足使用要求。

图6 环形回路的结构示意图
3 工作过程
水箱工作过程:闭合图4 中总开关,当水箱内水位下降时,浮球跟随水面一起向下移动,通过细绳拉动绕线轮向上转动,绕线轮带动锥形齿轮一起向上转动,锥形齿轮与齿轮一起向右旋转,齿轮带动齿条向左移动,环形回路中的金属触点随齿条一起经环形回路中上侧的导槽向左移动。当水箱内水位下降到预设高度时,刚好环形回路中的金属触点达到导槽最左端,触点与环形回路中下侧金属板接触形成闭合回路,相当于开关闭合,从而导致接触器线圈KM 通电,接触器开关闭合,电灯跟水泵通电,进而水泵开始工作往水箱中抽水。
随着水箱内水位的上升,浮球也在随着水面不停上升。弹簧拉着齿条向右移动,与齿条啮合的齿轮跟锥齿轮一起向左旋转,带动啮合的锥齿轮向下旋转,与锥齿轮同轴的绕线轮向下旋转将细线缠绕在绕线轮上的凹槽中。当水箱内水位上升到预设高度时,环形回路中的金属触点刚好达到最右端,触点断开与金属板的接触,接触器的线圈KM断电,接触器触点断开,水泵跟上水指示灯断电停止工作,上水过程到此结束。
采用手动模式时,闭合开关给上水指示灯与水泵通电,使水泵可以进行抽水工作。调整水箱内水位时只需要根据实际需要,将细固定在绕线轮不同的槽位中,按照绕线轮不同槽位提示的不同长度预留细绳长度即可。
4 结论
1)通过对浮球上水控制器的重新设计,使其达到可以预设水箱内水位高低、实现全自动工作、增加可靠性与安全性。
2)针对传统浮球控制方案的不稳定问题,采用环形回路设计,对水电进行分离,确保了日常使用的安全性,同时因为采用环形回路的往复循环工作方式,增加使用过程的稳定性。