轻小型太阳能/氢能无人机发展综述
2020-04-15刘莉曹潇张晓辉贺云涛
刘莉,曹潇,张晓辉,贺云涛
1. 北京理工大学 宇航学院,北京 100081 2. 北京理工大学 机电学院,北京 100081
全球能源供应日益紧张,低碳经济方兴未艾,各国政府及科研机构都在努力寻找清洁能源以替代传统化石燃料。太阳能、氢能等新型能源因其储量巨大、效率高、无污染、无排放等优势,日益受到世界各国的重视,采用太阳能电池、氢燃料电池等无污染绿色能源驱动的电动飞机应运而生[1-2]。1974年11月4日,世界上第一架太阳能飞机Sunrise Ⅰ 完成首航,太阳能飞机的研究就此拉开了序幕[3]。2003年,航空环境公司(AeroVironment)分别开展了小型燃料电池Hornet和大型太阳能无人机“Helios Protope HP03(太阳神)”加装燃料电池项目,2款无人机的飞行验证了燃料电池驱动不同尺寸无人机的可行性,开启了燃料电池无人机时代[4-5]。
轻小型无人机在军民用领域有着十分广阔的应用市场,已经在交通、勘探、通讯、安防等方面取得了良好的效果[6]。与传统的油动无人机相比,轻小型太阳能、氢能无人机利用太阳能电池、氢燃料电池作为能源,既无污染、无排放、低振动,又是目前可以代替传统长航时无人机的选择,更加适用于完成环境态势监控、高分辨率测绘、应急中继通讯、反恐防控及公共安全等任务[7-8]。进入21世纪,随着太阳能电池技术、氢燃料电池技术、二次电源技术、微电子技术、机体材料技术等发展,为了满足绿色环保与可持续发展的需求,低空太阳能、氢燃料电池无人机逐渐进入人们的视野,并正在成为轻小型无人机发展的热点[9]。
本文总结了轻小型太阳能、氢能无人机的发展历程;梳理了关键技术,并对新能源无人机的总体设计方法和能源动力系统的发展进行了较为深入的探讨;最后,对其发展趋势以及所面临的挑战进行了预测。
1 轻小型太阳能、氢能无人机发展历程
1.1 轻小型太阳能无人机发展历程
1.1.1 国外轻小型太阳能无人机
世界上第一架太阳能飞机Sunrise I(图1(a))即轻小型太阳能无人机,由DARPA资助、Boucher所设计。无人机采用正常式布局,机翼上铺设4 096块太阳能电池,无人机总质量12.25 kg,1974年11月4日,Sunrise I在California的Camp Irwin进行了无人机3~4 h的低空首飞[10-11]。此后,经过改造,研制了Sunrise II(图1(b))太阳能无人机,在相同翼展下,质量减轻了2.04 kg,电池片增加了384 片[12-13]。Sunrise无人机的首飞成功,标志着太阳能无人机时代的到来。
随后的很多年里,太阳能飞机的主要研究热点集中在高空太阳能飞机的探索。而早期的低空太阳能无人机主要出现在航模类无人机中,其中具有代表性的是Excel太阳能无人机。Excel无人机采用V形尾翼的常规布局(图1(c)),机翼上铺设144 块太阳能电池,无人机总质量0.724 kg,1990—1999年期间,Schaeper[14]使用该无人机创造了持续飞行时间11 h 34 min、直线飞行距离48.31 km的性能记录。直至21世纪初,随着相关技术的进步和人们对于低空小型无人机需求的大大提高,轻小型太阳能无人机的研究才得到迅速的发展。研究工作涉及世界多个国家,为了验证不同的目的而开展,下面是一些代表性的工作。
美国AC Propulsion公司创始人/董事长及首席工程师Alan Cocconi以个人名义资助实施了Solong项目,其目的是验证小型太阳能无人机可实现持续昼夜飞行的能力;Solong无人机采用上单翼、V形尾翼的常规布局(图2(a)),机翼上铺设76块Sunpower A300太阳能电池,配有120节Sanyo 18650锂离子电池(能量密度为220 W·h/kg),无人机总质量12.8 kg,2005年6月1-3日,无人机在加拿大的Desert Center Airport连续试验飞行了48 h后,由于手动遥控飞行的6名飞手精疲力竭而终止飞行[15-17]。瑞士苏黎世联邦理工大学的Autonomous Systems Lab实验室于2003年末开始实施“Sky-sailor(天空使者号)”项目,其目的是研制长航时飞行的小型无人机,验证无人机在火星低空探测飞行的可行性;Sky-sailor的布局源于一架Avance电动滑翔机,采用上单翼、V形尾翼的常规布局(图2(b)),机翼上铺设216 块RWE Space公司的RWE-S-32型太阳能电池,配有数节NCR 18650锂离子电池,无人机总质量2.444 kg,2008年6月20-21日,在瑞士的Niederwil完成了无人机27 h的低空飞行[18-20]。2013年,美国AeroVironment公司对电动PumaAE无人机进行改装,其目的是验证太阳能电池无人机的长航时能力;无人机采用正常式布局(图2(c)),机翼上铺设超薄砷化镓太阳能电池,与PumaAE锂电池版相比,太阳能版无人机飞行时长延长了2~3 h,可在空中飞行9 h[21]。AtlantikSolar也是瑞士苏黎世联邦理工大学 Autonomous Systems Lab实验室的项目,其目的是验证小型太阳能无人机在低空有风天气条件下长航时飞行的能力。无人机采用常规T尾式布局(图2(d)),机翼上铺设88 块SunPower E60太阳能电池,配有数节Panasonic NCR18650b锂电池,无人机总质量6.93 kg,2015年7月17日,该无人机以81.5 h(4天3夜)续航时间和2 316 km的飞行距离打破了50 kg以下新能源无人机航时记录[7, 22-23]。表1为国外轻小型太阳能无人机性能及参数。

图1 20世纪国外轻小型太阳能无人机Fig.1 Light and small scale solar powered UAVs abroad in the 20th century

图2 21世纪国外轻小型太阳能无人机Fig.2 Light and small scale solar powered UAVs abroad in the 21st Century
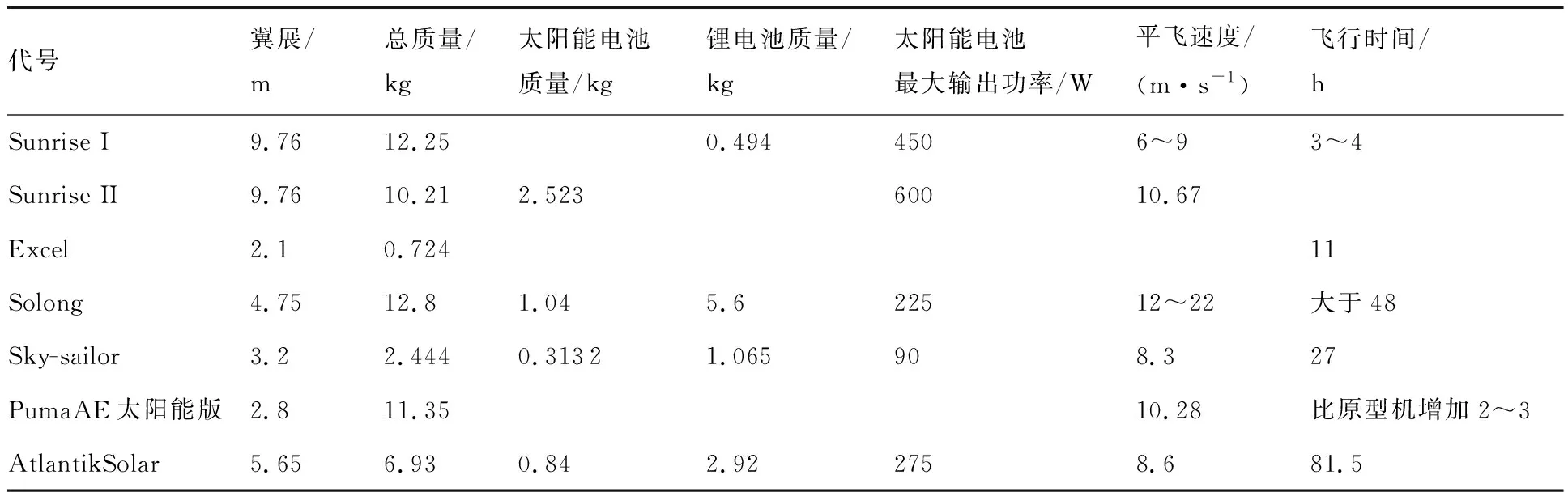
表1 国外轻小型太阳能无人机性能/参数Table 1 Performance/parameters of light and small solar powered UAVs abroad
1.1.2 国内轻小型太阳能无人机
中国首架太阳能无人机是北京航空航天大学赵庸教授和李晓阳博士于1992年研制的“翱翔者”号(图3(a))。无人机翼展1.88 m,采用碳纤/轻木机翼、碳纤/凯夫拉机体,在机翼和水平尾翼上铺设太阳能电池,采用镍氢电池作为辅助电源。1994年8月,在华北地区开展了相关飞行试验[24]。珠海新概念航空器研发中心于2002年启动“绿色先锋”太阳能无人机项目,其目的是绿色、新颖布局的空中实验平台。无人机采用复合飞翼式气动布局,在上下翼面均铺设太阳能电池(图3(b)),该机1/2比例验证机的翼展为7.48 m,起飞总质量30.5 kg。“绿色先锋”于2002年完成了原机1/4大小的技术验证机试飞,2003年底完成了1/2比例技术验证机试飞[25]。南京航空航天大学昂海松教授团队研制的“灵翼Ⅰ”(翼展4.5 m,图3(c))和“灵翼Ⅱ”(翼展6 m,图3(d))太阳能无人机,其目的是验证小型无人机长航时飞行能力。“灵翼”无人机机翼上铺设柔性铜铟镓硒太阳能电池,“灵翼Ⅱ”的机翼可进行部分变形,借此提高在不同飞行状态下的飞行效率[26]。西北工业大学周洲教授团队研制了“魅影”系列太阳能无人机,其目的是验证太阳能无人机的长航时能力。2017年7月,“魅影5”(图3(e))完成了16 h 9 min的飞行试验,创造国内最长太阳能无人机航时记录[27]。2019年7月,“魅影12”(图3(f))完成了27 h 37 min的飞行试验,打破之前“魅影5”的飞行时长记录[28]。本文作者团队研制了“蒲公英Ⅰ-B”和“蒲公英Ⅱ”太阳能无人机,“蒲公英Ⅰ-B”是太阳能/氢能混合动力无人机“蒲公英Ⅰ”的太阳能版,其目的是验证无人机太阳能电池相关系统的可行性;无人机采用常规正常式布局(图3(g)),翼展6.3 m,2019年5月完成了飞行测试[29]。“蒲公英Ⅱ”太阳能无人机(图3(h))),采用飞翼式布局,翼展3.8 m,2018年6月进行了垂直起飞测试[30]。

图3 国内轻小型太阳能无人机Fig.3 Light and small scale solar powered UAVs in China
1.2 轻小型氢能无人机发展历程
1.2.1 国外轻小型氢能无人机
2003年,AeroVironment公司在美国国家航空航天局(NASA)资助下分别开展了小型燃料电池“Hornet(大黄蜂)”和大型太阳能无人机“HP03(太阳神)”加装燃料电池项目,其目的是验证氢燃料电池驱动飞行器的可行性。“大黄蜂”无人机采用飞翼式布局(图4(a)),翼展38 cm,无人机总质量170 g;采用质子交换膜燃料电池(PEMFC),航时达到了0.25 h[31]。该公司同时尝试将可再生的氢燃料电池用于翼展75.3 m的“太阳神”太阳能无人机(图4(b)),用于支持夜间飞行,在2003年一次飞行试验中遭遇紊流结构失稳而解体坠海[4, 32]。2款无人机的飞行,表明燃料电池驱动不同尺寸无人机可行,开启了燃料电池无人机时代[33]。此后,为了提升轻小型无人机的航时,许多大学、研究机构、公司开始了轻小型氢燃料电池无人机的研制,下面是一些代表性的工作。

图4 燃料电池驱动飞行器验证项目Fig.4 Verification project of vehicles powered by fuel cell
国外高校率先开展了轻小型燃料电池无人机的研制工作。2004年,加利福尼亚大学的Ofoma和Wu[34]完成了用于环境遥感的燃料电池无人机机体初步设计和动力系统选型;2006年,Herwerth等[35]进行了详细设计和仿真试验,选取Horizon公司的550 W燃料电池和金属储氢瓶,研制了翼展5.5 m,总质量9 kg的全复材飞行样机,并完成首飞(图5(a))。2008年,加利福尼亚大学和俄克拉荷马州立大学共同研制了Pterosoar燃料电池无人机,无人机采用常规式布局(图5(b)),翼展4.4 m,采用Horizon公司的150 W质子交换膜燃料电池与2 100 mAh锂电池混合能源供电,全机质量5 kg,燃料电池质量2.273 kg,创造了FAI F5中航程为128 km的记录[36]。2005年,佐治亚理工大学的Moffitt[37]和Bradley[38-39]等研制了Georgia Tech Fuel Cell UAV(GT FCUAV);无人机采用正常式布局(图5(c)),翼展6.58 m,采用500 W燃料电池,全机质量16.4 kg,燃料电池质量4.96 kg,该无人机是当时以纯氢燃料电池为动力驱动的最大翼展无人机。密西根大学采用Adaptive Materials Inc.(AMI)公司的固体氧化物燃料电池(SOFC),研制了Endurance燃料电池无人机(图5(d)),无人机翼展1.524 m,总质量5.3 kg,2008年在Milan场地成功试飞了10 h[40-41]。表2为国外高校研制的轻小型燃料电池无人机情况。
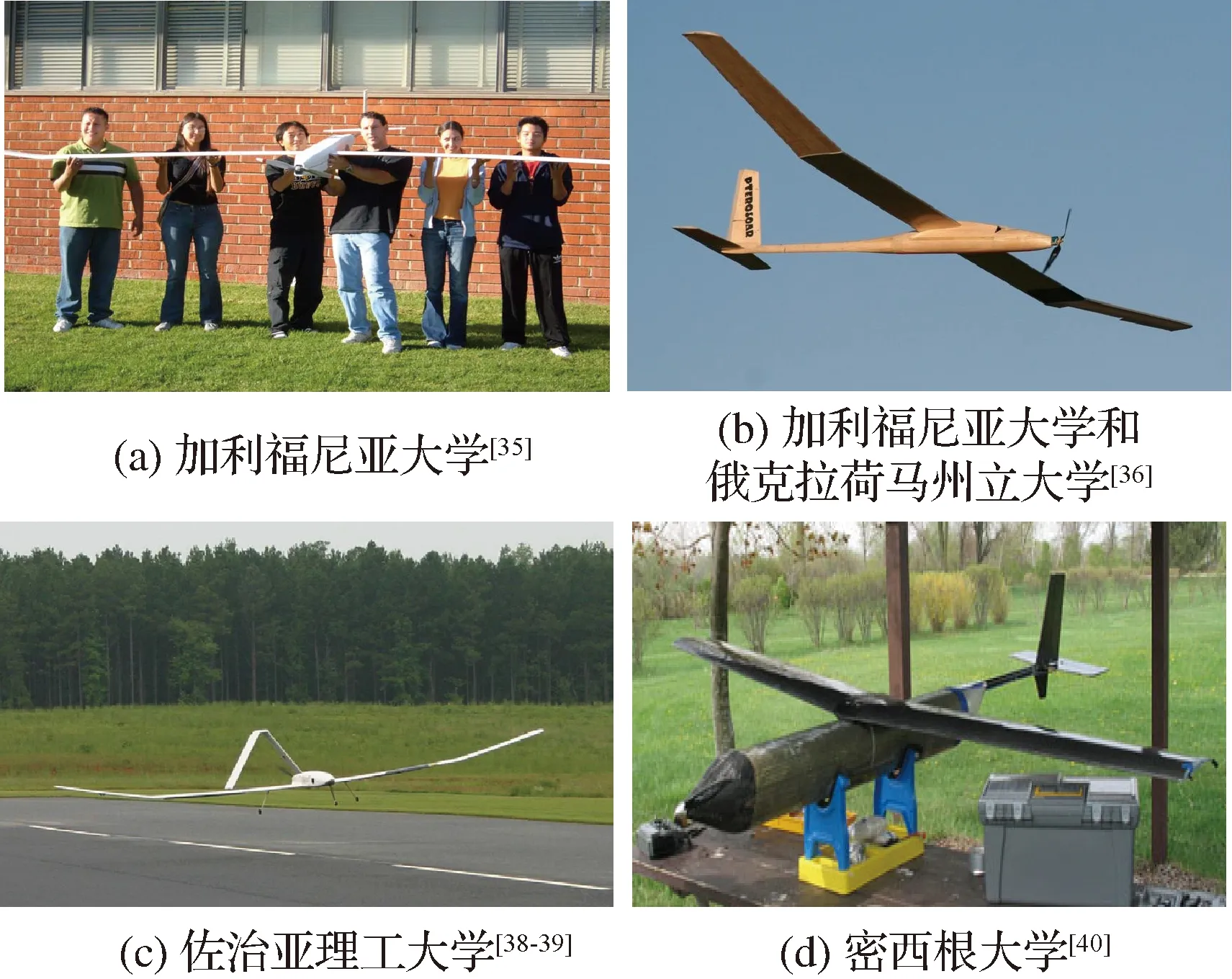
图5 国外高校研制的轻小型燃料电池无人机Fig.5 Light and small scale fuel cell powered UAVs developed by foreign universities
美国海军研究实验室(Naval Research Laboratory, NRL)一直致力于小型长航时燃料电池无人机的研制。2005年,研制了小型研究型燃料电池无人机Spider Lion,其目的是用于测试燃料电池的推进系统;无人机采用正常式布局(图6(a)),翼展2 m,总质量2.5 kg;采用Protonex公司100 W的质子交换膜燃料电池和34 MPa高压气态氢气;于同年11月飞行了3 h 19 min[42-43]。2006年开始XFC无人航空系统(UAS)项目,其目的是研制自动管射的小型全电动战术无人机。无人机机翼在机身背腹以交叉旋转的形式进行折叠,采用筒式发射,以兼容陆地、水面以及水下发射要求。无人机翼展3 m,总质量9.1 kg,采用Protonex公司的300 W质子交换膜燃料电池,携带4 L氢燃料可飞行6 h,采用550 W燃料电池系统可持续飞行7 h[44];2013年底,XFC成功完成水下潜射试验[45](图6(b))。2009年该实验室完成了“Ion Tiger(离子虎)”无人机项目的研制,其目的是验证燃料电池无人机的极限航时应用。无人机采用常规式布局(图6(c)),翼展5.2 m,总质量15.9 kg;采用Protonex公司550 W轻型燃料电池,携带气态氢气航时创造了26 h的飞行记录[46-48]。2013年,通过改进储氢技术,携带液态氢气成功飞行了48 h,创造了小型燃料电池无人机新的航时记录,并一直保持至今。为了进一步突破航时,对燃料电池采用更轻的新型金属极板,大幅提高燃料电池的发电功率至5 000 W,于2017年对新型燃料电池版的离子虎无人机进行了试飞[49]。表3为美国海军研究实验室研制的小型长航时燃料电池无人机情况。

表2 国外大学研制的轻小型氢燃料电池无人机性能/参数

图6 美国海军研究实验室研制的小型长航时燃料 电池无人机Fig.6 Small scale long-endurance fuel cell powered UAVs developed by Naval Research Laboratory of America
小型燃料电池无人机的巨大潜力,引起众多公司的改装尝试。2007年,AeroVironment公司对“Puma(美洲狮)”无人机进行改装(图7(a)),加装Protonex公司的燃料电池,总质量5.67 kg,于2008年测试飞行了9 h[50]。Boeing下属子公司Insitu将油动版的“扫描鹰”无人机改装成燃料电池版(图7(b)),采用Protonex公司的1 200 W燃料电池,航时仅达到10 h,是油动版的一半[51]。2009年,以色列开始进行燃料电池版无人机的改装,Israel Aerospace Industries(IAI)公司的Bird-Eye 650(图7(c))和BlueBird Aero Systems(蓝鸟)公司的Boomerang(图7(d))均进行了燃料电池动力系统改装。燃料电池版的BirdEye 650航时由4 h延长至6 h;燃料电池版的Boomerang(飞镖)航时超过了9 h。两家公司的无人机燃料电池均采用了新加坡Horizon公司的Aeropak燃料电池[52-54]。2010年,韩国航空宇航研究院Korea Aerospace Research Institute(KARI)开始对RemoEye-600无人机进行燃料电池版改装,并重新命名为EAV-1(图7(e)),该机翼展2.6 m,采用Horizon公司200 W的Aeropak燃料电池,总质量6.5 kg,航时由2 h提升至4.5 h[55]。2017年,南非的FlyH2 Aerospace公司对UA Alpha无人机进行燃料电池版改装(图7(f)),采用Pro tonex公司燃料电池[56],目前尚未见试验相关报道。表4为燃料电池版无人机改装情况。

表3 美国海军研究实验室研制的小型长航时燃料电池无人机性能/参数

图7 燃料电池版无人机改装Fig.7 Modification of fuel cell powered UAVs
近年来,轻小型燃料电池无人机的开发正在加速。洛克希德·马丁公司设计了Stalker eXtreme Endurance(XE)燃料电池无人机(图8(a)),其目的与AeroVironment公司的Puma无人机类似;无人机翼展3.6 m,总质量11 kg,有效载荷2.5 kg,升限3.6 km,采用AMI公司的固体氧化物燃料电池,航时超过8 h[57]。2011年,加拿大的EnergyOr公司研制了FAUCON H2燃料电池无人机(图8(b)),采用自研的EPOD燃料电池,航时超过10 h[58]。此外,波音欧洲研发中心(Boeing Research & Technology Europe, BRTE)研制了一款低空燃料电池无人机(图8(c)),其目的用于低空领域的侦察任务,无人机采用常规V形尾翼布局,翼展4.7 m,最大起飞质量11 kg,巡航速度17 m/s,采用Horizon公司200 W的固态燃料电池和6 S的5 000 mAh锂电池,2013年7月18日在Marugan airfield(Segovia,Spain)场地成功飞行了2 h 17 min[59]。2014年,以色列的蓝鸟公司研制了“WanderB(徘徊者B)”燃料电池无人机(图8(d)),采用Horizon公司为其匹配的燃料电池系统,航时达到10 h以上[60]。2016年,新加坡的ST Aerospace公司研发了Skyblade 360燃料电池无人机(图8(e)),采用Horizon公司的Aeropak燃料电池系统,无人机翼展3 m,总质量9 kg,航时达到6 h[61]。表5为国外无人机公司近期燃料电池无人机开发情况。

表4 燃料电池版无人机改装性能/参数Table 4 Performance/parameters of retrofitting fuel cell powered UAVs

图8 国外无人机公司近期燃料电池无人机开发Fig.8 Recent development of fuel cell powered UAVs by foreign companies
表5 国外无人机公司近期燃料电池无人机开发性能/参数
Table 5 Performance/parameters of fuel cell powered UAVs developed recently by foreign companies

无人机燃料电池类型燃料电池生产商翼展/m总质量/kg燃料电池质量/kg燃料电池输出功率/W飞行时间/hStalker XESOFCAMI3.6113008FAUCON H2PEMFCEnergyOr393.931010BRTE原型机PEMFCHorizon6.5816.44.965002徘徊者BPEMFCHorizon10Skyblade 360PEMFCHorizon396
1.2.2 国内轻小型氢能无人机
2010年,台湾成功大学试飞了国内第一架燃料电池无人机“灰秃鹰”(图9(a)),无人机翼展3.4 m,总质量30 kg,采用1 000 W的燃料电池和5 000 mAh的锂电池,总飞行时长为15 min[62]。同年,同济大学开始进行燃料电池无人机的结构设计和起飞质量估算方法等理论研究[63-65],2012年与上海奥科赛飞机公司共同研制了“飞跃一号”燃料电池无人机(图9(b)),无人机翼展5 m,总质量20 kg,在上海奉贤首飞了2 h。2014年,武汉众宇动力系统科技有限公司开发了“天行者”燃料电池无人机(图9(c)),2015年,首飞12 h创造了国内燃料电池无人机最长航时纪录。2017年,优雷特(银川)航空技术有限公司和珠海天晴航空航天科技有限公司共同研制了首架氢燃料电池倾转旋翼无人机(图9(d)),该机翼展2.6 m,总质量17 kg,在固定翼模式下可飞行6 h,多旋翼模式下可悬停2 h[66]。本文作者团队研制的“蒲公英I-A”氢燃料电池无人机是“蒲公英I”的燃料电池版(图9(e)),其目的是验证无人机氢燃料电池相关系统的可行性。2018年11月完成了80 min飞行测试[67-68]。

图9 国内轻小型氢燃料电池无人机Fig.9 Light and small scale hydrogen fuel cell powered UAVs in China
1.2.3 轻小型旋翼氢能无人机
2015年,加拿大首次尝试将燃料电池运用在旋翼类无人机上,EnergyOr公司研制了四旋翼H2Quad燃料电池无人机(图10(a)),采用与FAUCON H2无人机相同的、自研的EPOD燃料电池,试验飞行了2 h[69]。同年,国内武汉众宇动力系统科技有限公司将“游骑兵”多旋翼无人机改装成燃料电池版(图10(b)),采用1 200 W自研燃料电池和9 L、30 MPa的高压氢气瓶,持续飞行了3.5 h[70]。2016年,深圳科比特航空公司与武汉众宇和上海攀业国内两家燃料电池公司合作,研制了HYDrone-1800多旋翼燃料电池无人机(图10(c)),采用1 800 W燃料电池和辅助电池共同供电,进行了4 h的试验[71]。2017年,Flight Wave航空航天系统公司和Intelligent Energy公司共同研制了一款新型氢燃料电池多旋翼无人机Jupiter-H2(图10(d))[68]。2018年,Bshark公司研制出第二代“独角鲸”(Narwhal 2)四旋翼燃料电池无人机(图10(e)),该机可持续飞行2 h[68]。2019年,韩国Meta Vista公司研发了四旋翼平台(图10(f)),采用Intelligent Enesrgy公司800 W的燃料电池动力模块,配备了6 L液态氢气储氢瓶,试飞了12 h,创造目前旋翼类无人机最长航时记录[68]。

图10 旋翼氢燃料电池无人机Fig.10 Hydrogen fuel cell powered rotor UAVs
1.3 轻小型太阳能/氢能无人机
2010年,美国的伊利诺理工大学[72]用MATLAB/Simulink对太阳能/燃料电池混合能源无人机模型进行仿真,研究采用燃料电池/太阳能混合能源代替燃油,用以实现轻小型无人机昼夜持续飞行的可行性。2016年,中东的沙迦美国大学[73]研究了小型太阳能/氢能混合动力无人机的集成问题,设计了无人机总体概念方案(图11(a)),其翼展3.83 m,总质量10 kg,采用200 W的燃料电池、50 W的太阳能电池和5 000 mAh的锂电池混合能源。
2012年,韩国航空宇航研究院(KARI)在成功试飞EAV-1燃料电池无人机后,开始对太阳能电池、燃料电池和锂电池进行混合动力建模仿真与试验测试,并研制了EAV-2混合动力无人机[74](图11(b))。无人机采用常规T形尾翼布局,翼展6.9 m,总质量18.5 kg,铺设52 块晶体硅太阳能电池,太阳能电池最大输出功率240 W,巡航速度12.1 m/s。2012年6月21日,创造了22 h 航时飞行记录[55, 75]。2017年,该研究院采用硼氢化钠燃料,重新研制了太阳能/氢能混合能源无人机(图11(c))[76]。无人机翼展4.2 m,采用300 W燃料电池和80 W太阳能电池的能源供电,总质量11 kg,太阳能电池质量1.9 kg,燃料电池质量2.8 kg,无人机巡航速度15 m/s。2018年,进行了1.5 h试飞测试[77]。

图11 太阳能/氢能混合能源无人机Fig.11 Solar/hydrogen hybrid energy powered UAV
本文作者团队从2009年起,开始对轻小型太阳能/氢燃料电池无人机的设计方法、能源管理等方面进行研究[70, 78-79],并对混合能源无人机进行了仿真与试验分析[80-83]。2018年,研制了太阳能/燃料电池混合能源无人机(图11(d)),无人机采用常规式布局,翼展6.3 m,总质量25 kg[84]。目前,已完成该无人机太阳能电池版与燃料电池版的飞行测试。
2 关键技术研究进展
应用于中低空领域的轻小型太阳能、氢能无人机,其关键技术主要集中于总体设计、混合动力系统设计以及能源管理等方面,以下对其进展情况进行详细介绍。
2.1 总体设计方法
2.1.1 太阳能无人机总体设计
太阳能无人机是一种长航时的电动新能源无人机,在能源上以太阳能为主要来源,在动力方面以空气螺旋桨作为推进装置,在气动上具有低雷诺数的特点,在结构上采用大展现比的轻质机翼,这些都与常规无人机存在较大差异,对传统的无人机总体设计提出更大的挑战。
美国最早以工程的角度开展太阳能飞行器研究及其总体设计工作。针对太阳能飞行器,1980年,Phillips[85]从实用角度分析了飞行力学特性,1983年,MacCready等[86]从工程角度讨论了研制Gossamer Penguin和Solar Challenger太阳能飞行器项目设计过程,Boucher[12, 87]同样基于工程经验分析了Sunrise项目的设计、制造以及试飞过程。
上述文献对早期的太阳能飞行器研究提供了重要的参考。然而,太阳能无人机受环境因素、飞行日期、地理位置以及自身气动结构影响较大,与常规飞行器总体设计阶段考虑因素有较大的差异。1982年,Youngblood和Talay[88]首次提出太阳能无人机的总体设计不同于传统飞行器。在文献[88]中,Youngblood和Talay在总体设计中提出分系统建模方法,考虑了飞行日期、地理纬度、能量平衡、无人机尺寸及气动特性之间的关系,给出一种高空太阳能无人机方案。1984年,Youngblood等[89]又进行高空太阳能无人机的总体设计和初步性能分析,研究飞机功率、尺寸、气动性能的关系,结果表明无人机目前较难实现昼夜能量闭环,提出太阳能用于白天和储能电池用于晚上的混合能源方法。在Youngblood基础上,1990年,Colozza[90]在研究金星太阳能无人机的可行性与总体设计时,提出了翼载荷-展弦比-翼面积的参数迭代设计方法,根据该方法来选取无人机总体设计方案。1995年,美国的Brandt和Gilliam[91]提出了基于可行域求解的高空太阳能无人机总体设计方法,该方法将太阳能无人机能源与动力的特殊性和限制因素纳入设计过程,通过起飞翼载、太阳能电池面积与参考机翼面积比值、任务剖面动力需求来确定无人机参数的可行域,根据该方法对3种概念无人机(包括轻于空气的飞艇和重于空气的常规机翼、串联机翼)进行研究,得出高空太阳能无人机无法维持定高度飞行,需储存的重力势能来提供动力以满足任务需求。上述太阳能无人机的总体设计方法除了考虑常规无人机的平衡受力关系外,重点关注能量平衡与可行性,把能量引入到总体设计中进行参数的迭代和确定。
进入21世纪,随着工业和农业应用对轻小型电动无人机的长航时需求,太阳能无人机开始向小型化、轻质化、低空化发展。与高空太阳能无人机相比,中低空太阳能无人机无法进行势能存储,且面临更复杂的大气环境[22, 92](如云遮、阵风),导致无人机总体设计面临巨大的挑战。2008年,苏黎世联邦理工大学的Noth[20]提出一套无需反复迭代计算的轻小型太阳能无人机概念设计方法,首先基于平飞中的功率和重量平衡条件建立无人机总质量与设计参数间的近似模型,通过求解数学模型得到无人机总质量和设计参数。文献[20]关注总质量、翼展及展弦比3个变量要素关系,改变参数来优化功率、巡航速度等设计特征,以确保实现无人机24 h长航时的任务需求。利用此方法研制了Sky-sailor太阳能无人机(图2(b)),持续试飞了27 h。Rajendran和Smith[93]对文献[20]提出的概念设计方法进行改进,指出文献[20]等方法的数学模型只关注质量、性能和气动3个方面,因此增加了3个设计考虑方面(即电动推进、灵敏度和趋势分析)和3个改进设计特征(即质量、气动和任务剖面),以增强现有数学模型实现无人机的精确设计。2010年,Shiau等[94]首次将优化引入太阳能无人机的总体设计中,建立了以无人机的展弦比和机翼面积作为设计变量,重量为目标函数的优化模型,得到了无人机尺寸和巡航速度等参数,并用该方法设计了XIHE太阳能无人机概念方案。
上述无人机设计时均没有考虑太阳能在中低空领域的鲁棒性,特别指出的是文献[20]所设计的Sky-sailor太阳能无人机持续飞行27 h后,所剩的锂电池电量只有5.8%,不足以再支撑无人机进行持续飞行。针对该问题,2011年,苏黎世联邦理工大学的Leutenegger等[95]提出了考虑优化剩余时间和航时的轻小型太阳能无人机总体优化设计方法(图12)。在文献[95]中,总体设计考虑太阳能无人机进行24 h昼夜飞行后,由于凌晨外界环境无法保证太阳能电池产生足够能量来提供平飞所需的能量(图13),提出优化剩余时间(即额外能量)的总体设计方法,并用该方法对轻小型太阳能无人机进行概念设计与性能分析。
2013—2016年,为了实现轻小型太阳能无人机的24 h持续飞行,明尼苏达大学的分布式机器人中心的Morton等[92, 96]提出了考虑鲁棒性的无人机总体设计方法。文献[96]指出总体设计关键是考虑其剩余能量的时间裕度问题(即鲁棒性),以仿真无人机持续飞行48 h为例(图14),考虑太阳能电池能量、锂电池能量、平飞所需的能量三者之间的关系,提出将时间裕度(即系统所能使用剩余能量的时间)作为衡量连续飞行的鲁棒性指标,这个指标由剩余时间(指锂电池补充昼夜飞行后,太阳能电池发电能量等于平飞所需能量后剩余锂电池所能提供平飞能量的时间段)和满电裕度时间(指锂电池充满容量和开始补充太阳能电池供电的时间段)2个裕度时间表示,从而实现量化轻小型太阳能总体设计的鲁棒性指标和优化准则,运用该准则研制了UMN太阳能无人机样机并试飞[97]。2016年,文献[92]进行2 m翼展的轻小型太阳能无人机总体设计时,在文献[96]提出的剩余时间和满电裕度时间2个鲁棒飞行指标都必须为正值的基础上进行了改进,指出剩余时间必须为正值,但是满电裕度时间可以为正值或者负值,因为锂电池容量如果从太阳能电池充电时受到干扰而不能充满电量,可以采用锂电池的剩余裕度时间所能提供的能量来弥补,这样使无人机的总体设计和性能预测更精确。

图12 太阳能无人机总体优化设计框架[95]Fig.12 Optimal design framework for solar powered UAVs[95]

图13 持续飞行下太阳能、所需功率和电池 容量的关系[95]Fig.13 Relation between solar energy, required power and battery capacity in sustained flight[95]
但Morton等[92, 96]提出的考虑剩余时间和满电裕度时间的鲁棒性指标和优化准则更多的是理论研究,没有用于优化设计并进行飞行试验验证[22]。2015—2017年,苏黎世联邦理工大学的Oettershagen等[7, 22]基于Noth[20]和Leutenegger[95]等提出的轻小型太阳能无人机总体设计方法基础上进行了扩展,把无人机飞行地点的不确定气象条件考虑到总体设计中。文献[7]指出若只考虑文献[95]提出剩余鲁棒飞行时间,得到结果是在最优的太阳能电池发电条件下携带最重的锂电池,但随着太阳能电池发电受到气象干扰,太阳能电池不能给所携带的锂电池充满电,所以增加了锂电池满电后的裕度时间指标,2个裕度时间与文献[96]相同且都为正值,但文献[7]考虑更为详细的剩余时间(即剩余锂电池所能提供的能量),其中包括工作日的夜晚、云遮、下降气流、平飞功率估算不准这4个不确定性因素引起的能量消耗。文献[22]首先对文献[95]中的总体设计框架进行扩展,把充电裕度指标加入到框架中,考虑飞机设计和分析迭代的优化设计框架(图15);再者对文献[7]所提的总能量-太阳能能量-平飞所需能量的关系进行能量扩展,由于太阳能能量大于平飞所需能量时给锂电池充电受其容量的限制,提出了具有指数递减的锂电池充电限制模型,并把锂电池能量模型引入能量状态关系中(图16)。Oettershagen把剩余时间和充电裕度时间的能量指标和优化准则运用于优化框架,并研制了AtlantikSolar低空轻小型太阳能无人机(图2(d))成功连续飞行了81 h,后续低空轻小型无人机的设计可以借鉴此方法。

图14 太阳能无人机总体设计中考虑鲁棒参数的 48 h能量变化图[96]Fig.14 Energy variation in 48 h flight of solar powered UAV considering parameter of robustness in conceptual design[96]

图15 太阳能无人机总体设计与分析框架[22]Fig.15 Solar-powered UAV conceptual design and analysis framework[22]

图16 轻小型太阳能无人机总体设计中考虑鲁棒 参数的48 h能量仿真图[22]Fig.16 Simulation of energy in 48 h flight of solar powered UAV considering parameter of robustness in conceptual design
总体而言,太阳能无人机设计需要较多地考虑能量状态平衡问题。在轻小型太阳能无人机总体设计过程中,需要针对环境因素(云遮挡、阵风等)的影响下所带来的能源动力系统问题、气动与结构问题,采用考虑剩余时间和充电裕度时间的鲁棒性指标和优化准则来进行无人机的总体优化设计。
2.1.2 燃料电池无人机总体设计
燃料电池无人机和太阳能无人机都是长航时的新能源无人机,但燃料电池无人机是以燃料电池作为主要动力来源,燃料电池与常规电池不同,它是一种把燃料和氧化剂中蕴含的化学能直接转化为电能的电源装置[34],本质上仅有发电功能而不具备储电功能,由于燃料电池系统所带来的气动、结构、能源及动力方面问题在总体设计上提出了严峻的挑战。
燃料电池无人机的理论研究可以追溯到20世纪80年代,Youngblood等[89]在进行长航时飞机研究时,就提出使用氢燃料电池作为无人机的动力来源,但受当时技术的限制,不能研制出完成任务剖面和有效载荷的飞机。随着燃料电池和储氢技术的发展,研究者选取在现有飞机设计的基础上,尝试采用燃料电池推进系统改装原有动力系统的设计方法。Kohout[98]、Berton[99]及Wentz[100]等提出了保持起飞重量为约束条件下对轻型通用飞机进行了改装设计研究,分析得出由燃料电池改装后的飞机可能具有飞行能力但性能无法与内燃机媲美,文献提出的解决方法是使用先进的燃料电池和高比能的储氢装置。上述文献的关注点在燃料电池推进系统的尺寸和输出功率上[98-100]。轻小型燃料电池无人机[50-56]同样使用了改装设计方法,对燃油和蓄电池原型机进行改装设计,改装结果表明燃料电池无人机较油动版降低了噪声、较蓄电池版提高了航时。图17[101]为燃料电池飞机改装设计方法。

图17 (燃料电池)飞机改装设计方法[101]Fig.17 (Fuel cell powered) aircraft retrofitting methodology[101]
上述改装方法设计简化,减少了机体重量和气动的不确定,但是燃料电池系统受机体尺寸约束而影响整体的性能和安装,所以研究者提出多学科设计方法来代替改装方法。2004年,加利福尼亚大学的Ofoma和Wu[34]首次尝试轻小型燃料电池无人机的概念设计。文献[34]进行了所需能量-选取燃料电池-无人机布局的简单学科迭代,得出结论是无人机的设计取决于燃料电池的选取,由于燃料电池花费、功率输出和重量问题未能与无人机机体布局匹配上而暂时搁浅。2005年,Choi等[102]提出了全电动飞机的推进系统设计架构,特别是针对燃料电池能源和动力系统学科,用于确定的推进系统参数和性能。Chiang等[103]直接针对轻小型燃料电池无人机进行类似的多学科架构设计,以燃料电池为主、锂电池为辅的混合动力方式来满足功率需求,由能源动力、起飞总重量等约束条件确定了机体尺寸。上述文献不仅仅关注燃料电池推进系统的尺寸,更考虑其性能与无人机机体的关系。
不管是改装设计还是多学科设计方法具有一定的局限性,导致研制的无人机不但满足不了任务需求更无法与常规无人机性能相比较。2005年,Soban和Upton[104]首次利用燃料电池的特性映射到无人机的研制。文献[104]采用技术映射方法研究了质子交换膜燃料电池(PEMFC)和固体氧化物燃料电池(SOFC)无人机近期和未来性能,得出的结论是燃料电池无人机适用于长航时、低功率的任务,传统的内燃机推进系统在当时性能较好,未来SOFC燃料电池推进系统将成为传统内燃机可行的替代品。2006—2010年,佐治亚理工大学的Moffitt[37, 101]和Bradley[105-107]等针对燃料电池动力系统的特性进行轻小型燃料电池无人机的总体设计。Moffitt通过多学科设计分析的方法对燃料电池无人机进行设计和性能分析(图18)[101],通过探索无人机的设计空间来确定无人机的总体设计方案,其中设计空间由不确定性传递思想对分系统模型进行指导和分解来建立各子系统精确模型用以探索具有鲁棒性的可行设计空间[37, 101]。Bradley等[105-106]则更多的关注无人机中的燃料电池推进系统的模型、设计和管理,并提出燃料电池动力装置和无人机集成应用的总体设计方法[107]。他们根据研究研制了样机(图5(c))来验证设计结果[38-39]。上述文献关注燃料电池系统的特性,同时与无人机子系统模型多学科的综合设计与性能分析。
2018年,Oh[108]提出了一种基于能量和性能指标的轻小型燃料电池无人机概念设计方法。文献针对轻小质子交换膜燃料电池无人机构建了一套概念设计流程,其中重点关注PEMFC和储氢的比功率和比能量对无人机航时的影响。
总而言之,轻小型燃料电池无人机总体设计的重点是能源与机体的权衡设计,考虑能源、动力、气动等多个学科耦合的综合设计与性能分析。

图18 (燃料电池)无人机多学科设计分析框架[101]Fig.18 Multidisciplinary design analysis framework for (fuel cell powered) UAVs[101]
2.1.3 太阳能/氢燃料电池无人机总体设计
太阳能/燃料电池无人机是一种以太阳能/燃料电池为主的混合能源无人机,其设计不是太阳能无人机和燃料电池无人机的简单叠加,而是由混合能源所带来一系列的总体设计问题。
为了追求更长的任务航时,研究者尝试太阳能与燃料电池相结合的混合能源途径。2003年,美国率先在太阳能无人机的基础上加装燃料电池(HP03(太阳神)),以解决蓄电池能量密度低的问题,结果由于飞行试验中遭遇紊流结构失稳而坠毁[4, 32]。此后,2010年,美国伊利诺理工大学的Chen和Khaligh[72]提出了太阳能/燃料电池混合动力无人机方案,用以满足功率负载浮动和长航时飞行对动力需求,仿真结果说明了方案理论上的可行性。2014年,韩国航空宇航研究院的Lee等[109]提出了低空轻小型太阳能/氢燃料电池无人机的总体设计方案,考虑太阳能/燃料电池的能量管理(详细能源动力方案见2.2.2节),研制了EAV-2无人机(图11(b)),完成了22 h的飞行试验,证明了低空轻小型混合动力无人机的可行性。2017年,该研究所的Gang等[76]也进行了与文献[109]类似的混合能源无人机总体设计工作。
上述文献关注点在混合推进系统的使用和管理,没有考虑推进系统与机体平台、飞行剖面的耦合关系。2014年,李延平[83]提出了太阳能/氢能无人机多学科总体概念设计方法,搭建了混合动力无人机多学科优化设计平台,采用了物理规划的多目标优化策略和遗传算法对无人机总体方案进行优化设计。2016年,本文作者团队[110]提出一种考虑全机重量能量耦合关系的总体设计方法,针对典型任务剖面,考虑能量平衡和重量平衡下各子模型的耦合关系,得到混合动力无人机的关键设计参数。采用该方法以1.5 kg任务载荷为例,完成混合动力无人机的总体方案设计,仿真分析表明在能源系统重量相同情况下,混合动力无人机的航时要优于纯锂电池无人机和燃料电池无人机。上述文献关注混合能源和机体平台的关系。
2.2 能源与动力系统研究进展
2.2.1 能源系统研究进展
从能源的角度,影响轻小型太阳能、氢能无人机的主要是太阳能电池的转化效率和柔性化,燃料电池的功重比,以及锂电池的能量密度。随着新材料和新技术的发展,太阳能电池转换效率不断提高,其中,用于无人机的以硅系太阳能电池和化合物太阳能电池为主[111],图19[112]是历年来全世界高效太阳能电池研究进展。从图中可以看出,单晶硅太阳能电池转化效率从最初的14%提升到了27.6%。
继燃料电池在不同尺寸的无人机应用之后,国外Protonex、AMI、EnergyOr、HES以及国内的武汉众宇(Troowin)和上海攀业(Pearl)等公司开始了研发应用于轻小型无人机的燃料电池。其中,AMI公司主要研发固体氧化物燃料电池,其他公司均研制质子交换膜燃料电池,基本参数如表6所示。
用于无人机上的氢燃料类型主要有3种:气态氢、液态氢和化学氢化物。不同的形态要求不同的储氢装置。目前,最简单且应用最广泛的储氢方式为高压气瓶储氢。根据材料和储氢压力,气瓶可分为4类[33],如表7所示,气态储氢压力一般为20~70 MPa。不锈钢储氢装置最大承压仅20 MPa,储氢比不超过3%,一般为标准的工业储氢钢瓶;采用碳纤维缠绕和高密度聚合物衬里的储氢方式可承压70 MPa,储氢比可达到11.3%,适合应用于无人机领域。

图19 美国NREL(National Renewable Energy Lab)统计的太阳能电池转化效率图[112]Fig.19 Conversion efficiency of solar cells based on American NREL statistics[112]

表6 轻小型无人机商用燃料电池基本参数
储能电池种类多样,图20是几种车类和航空航天类能源中的储能装置Ragone图[113]。Ragone图表示储能装置中能量密度(Energy Density)和功率密度(Power Density)之间的对数关系,其中斜对角线表示放电时间。
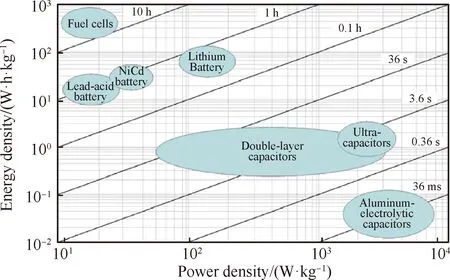
图20 几种典型储能电源Ragone图[113]Fig.20 Ragone diagram of several typical energy storage power supplies[113]
从图20中可以看出,燃料电池(Fuel cells)的能量密度较高,适合长时间放电;锂电池(Lithium battery)、镍镉(NiCd battery)等化学电池的功率密度较高,适合高功率放电。锂电池分为锂离子电池和锂金属电池,锂离子电池(Li-ion)不含有金属态的锂,可单独用于轻小型无人机,也可与太阳能电池、燃料电池混合供电,其目前安全使用的能量密度为100~200 W·h/kg[114];锂聚合物电池(Lithium polymer,Li-Poly)与锂离子电池类似,主要的区别是使用了固体塑性聚合物作为电解质,区别于锂离子电池的圆柱形外形,锂聚合物电池可以按任意形状封装。锂硫电池(Lithium sulfur,Li-S)由一小部分重量的锂和一部分硫组成,能量密度大于锂离子电池,其价格昂贵且处于科研阶段[115]。
因此,从新能源发展的现状分析,目前单一能源系统均无法满足轻小型电动无人机长航时的应用需求。基于优势互补的思想,多种电源混合应用是轻小型太阳能和燃料电池无人机发展的主要趋势,也必然引入更复杂的混合能源与动力系统,从而需要深入的研究能源动力构型和处理多电混合能源管理方法。
2.2.2 能源动力系统拓扑构型研究进展
1) 太阳能动力系统拓扑结构
太阳能动力系统的拓扑研究相对较早,2008年,苏黎世联邦理工大学的Noth[20]给出了经典的太阳能无人机动力拓扑总体构型方案,如图21所示,主要采用了太阳能板PV,最大功率点跟踪器MPPT,并与蓄电池混合后为动力系统和其他电子设备供电。对于太阳能电池和蓄电池的混合构型,给出了较为详细的设计方案,如图22所示,将机翼太阳能电池分为三段,每一段配一路MPPT后并联到锂电池,以保证太阳能电池最大效率地利用。

图21 经典太阳能动力系统拓扑[20]Fig.21 Classical solar power system topology[20]

图22 多段太阳能电池与锂电池混合方案[20]Fig.22 Schematic of hybrid multi-solar panel and Li-ion battery[20]
2009年,加州理工大学的Morrisey[116]给出太阳能无人机可进行主动能源管理的动力系统拓扑方案,如图23所示,其中电力管理单元用于进行全机动力电和设备电的主动管理。同年,淡江大学的Shiau等[117]也给出了类似的太阳能无人机动力系统拓扑方案,如图24所示,设计了多组蓄电池与太阳能电池的混合电路,经过原理样机研制和测试,验证了电路系统和控制法的有效性。2013—2016年,从中国国防科技大学Hou等[118-120]与英国克兰菲尔德大学Smith和Abbe[121]关于太阳能无人机的相关综述和技术研究中可以看出,该期间的太阳能动力系统拓扑构型方案基本都是类似拓扑构型。2019年,刘刚[29]给出了3种类型太阳能电池拓扑结构方案,分析指出主动混合拓扑可合理地对蓄电池充放电管理,提高太阳能利用率、延长蓄电池使用寿命。
2) 燃料电池动力系统拓扑结构
2008—2009年,佐治亚理工大学Bradley等[106, 122]在进行燃料电池无人机建模、设计及能源管理研究时给出了典型的燃料电池动力系统拓扑构型,如图25所示。其中,能源存储系统采用蓄电池,通过相应的管理系统后与燃料电池并联对动力供电。2008—2012年,克兰菲尔德大学Karunarathne等[123-126]开展燃料电池无人机的动力系统研究,给出了图26所示的燃料电池/锂电出混合拓扑构型,为燃料电池和锂电池都配置了DC/DC转换器,其中,连接锂电池的为双向DC/DC,已实现对锂电池的充放电控制。2014—2017年,悉尼科技大学Gong等[127-130],对燃料电池无人机动力系统中的能源特性开展较为深入的研究,基于国际领先水平的航空专用燃料电池Aeropak,给出了能源系统拓扑构型,如图27(a)[127]所示,并搭建了燃料电池蓄电池混合动能源试验系统,如图27(b)所示[128],进行了混合能源系统性能测试,研究表明了蓄电池对混合系统的动态特性起着重要的作用。

图23 太阳能与锂电池混合动力主动管理方案[116]Fig.23 Active management scheme for hybrid solar power and Li-ion battery[116]

图24 带蓄电池管理的太阳能与锂电池混合 方案[117]Fig.24 Scheme for hybrid solar power and Li-ion battery system with battery management[117]

图25 典型燃料电池动力系拓扑[122]Fig.25 Typical topology of hybrid fuel cell powered system[122]
2018年,张晓辉[70]针对燃料电池为主能源的无人机动力系统,设计了纯燃料电池动力系统、燃料电池/锂电池(简称燃锂)被/主动混合动力系统3种拓扑结构方案,如图28所示,试验对比分析了3种拓扑方案的放电特性和氢耗量,验证了主动拓扑方案氢耗量最小,电源工作状态也最为合理,最后给出了各拓扑方案的适应性建议。
2019年,西北工业大学的Lei等[131],综述混合动力无人机的能源管理策略时,总结2种主动燃料电池混合动力系统拓扑方案,从转换器的个数上分为单或多转换器拓扑方案,如图29所示。

图26 双转换器燃料电池混合动力系统拓扑[123]Fig.26 Topology of hybrid fuel cell powered system with double converters[123]
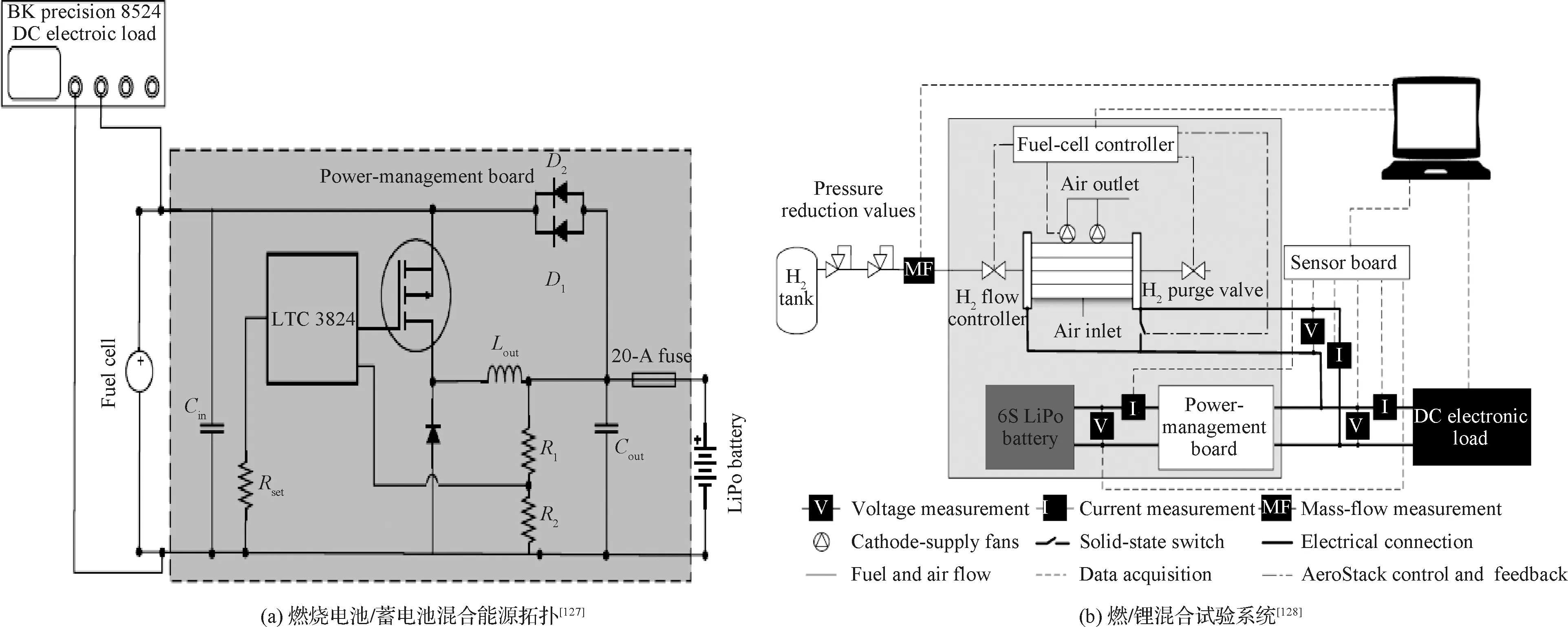
图27 燃料电池/锂电池混合能源系统拓扑Fig.27 Topology of hybrid fuel cell/Li-ion battery energy system

图28 3种燃料电池动力系统拓扑[70]Fig.28 Three topologies of fuel cell powered systems[70]
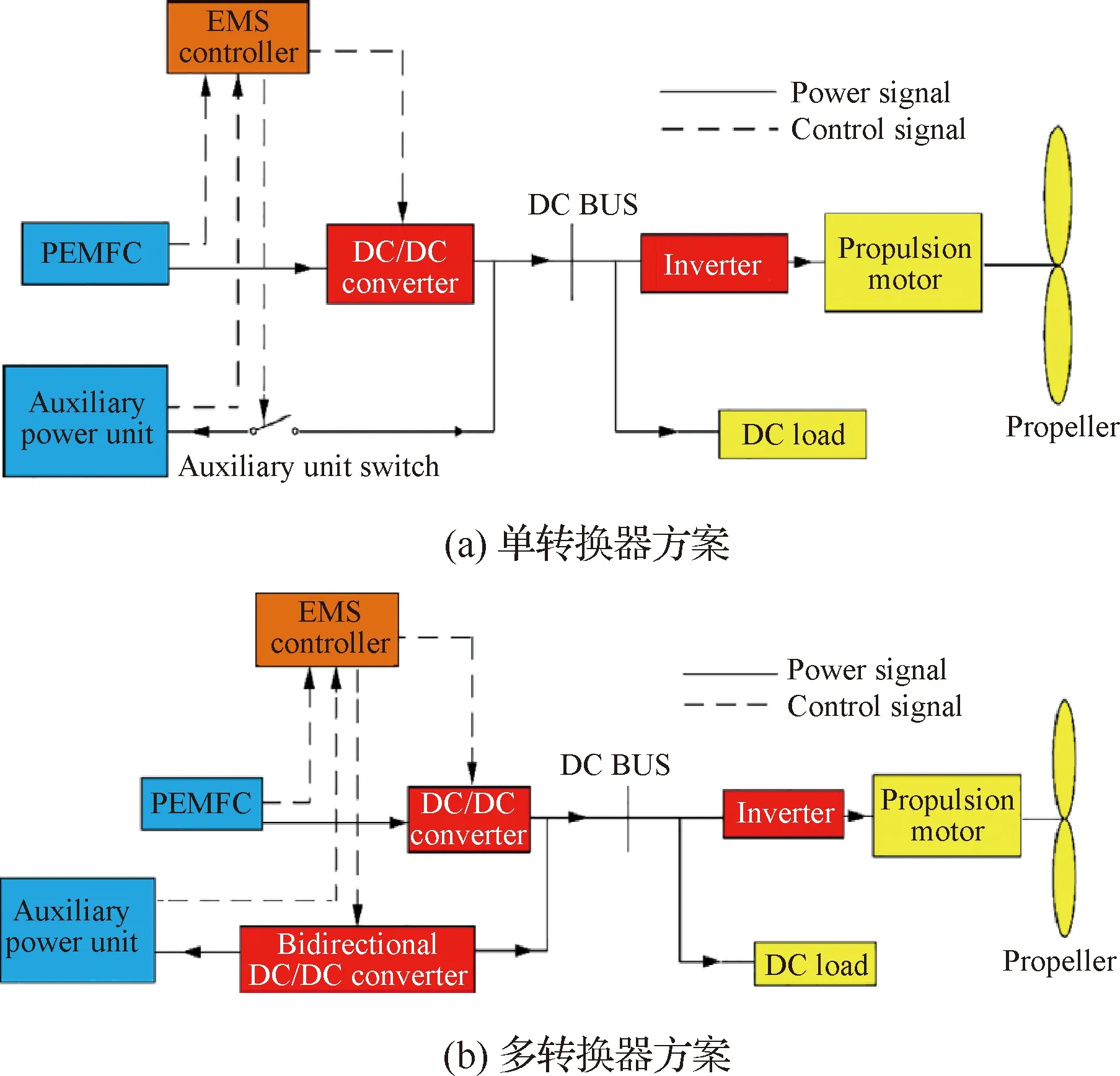
图29 燃料电池混合拓扑方案总结[131]Fig.29 Summary of topology scheme of hybrid fuel cell powered systems[131]
3) 太阳能/燃料电池混合动力拓扑结构
基于更长航时的需求和“优势互补”的思想,太阳能电池/燃料电池混合拓扑逐渐得到重视。2010年,伊利诺理工大学Chen和Khaligh[132],采用可再生燃料电池和蓄电池作为无人机的能源存储系统,给出了典型的太阳能/燃料电池/蓄电池混合动力系统方案,如图30所示。2012年,韩国宇航研究所Lee等[55]设计了太阳能电池/燃料电池/蓄电池混合动力无人机的主被动混合动力系统方案,如图31所示。同年,李延平等[133]也给出了太阳能/燃料电池/锂电池的混合动力拓扑方案,如图32(a)所示。2016年,本文作者团队[110]详细设计了太阳能/燃料电池/锂电池混合动力系统拓扑构型,如图32(b)所示。2019年,Lei等[131]也在综述中总结了类似与Lee的3种电源混合的拓扑方案,如图33所示。
从拓扑构型发展可见,混合能源越多,拓扑结构越复杂,为了追求更高的能源系统效率,主动电力管理部件包括最大功率点跟踪器,DC/DC转换器,以及能源管理系统也逐渐用于能源与动力系统结构之中,用于实现对能源的控制,为高效但复杂的能源管理策略提供了硬件支持。
2.2.3 能源管理研究进展
太阳能/氢能无人机能源管理的主要目的为:使无人机长时滞空,使能源系统健康、合理、高效地发挥“优势互补”的潜力。太阳能无人机的能源管理与飞行航迹耦合,主要有:最优能量航迹策略和等效重力势能储能策略。2007—2009年,Klesh和Kabamba[134-135]研究了太阳能飞机水平飞行时的能量最优轨迹,2013—2016年,Hosseini等[136-137]发展了3D空间内的太阳能/蓄电池混合动力无人机的最优能量航迹规划方法。2013年,Gao等[120, 138]开展了太阳能无人机的等效势能储能策略研究。2016—2019年,Huang等[139-140]研究了太阳能无人机在跟踪地面移动目标时的最优能量航迹规划方法。马东立等[141-142]也开展了基于重力储能的飞行航迹研究和三维航迹的优化研究。以上研究的主要面向高空长航时太阳能无人机,侧重考虑大空域跨度内姿态和航迹对太阳能电池的影响,试图找到能量最优的飞行航迹,属于预先规划的范畴。对于轻小型太阳能无人机,主要应用于中低空环境,且执行任务过程通常需要按照既定航线飞行,很难有足够的空间和自由度进行能量最优航迹的规划,其能源管理更侧重于对太阳能电池最大功率点的跟踪控制。

图30 典型太阳能/燃料电池/蓄电池混合拓扑[132]Fig.30 Typical topology of hybrid solar cell/fuel cell/battery powered system[132]

图31 主被动太阳能/燃料电池/蓄电池混合拓扑[55]Fig.31 Passive and active topologies of hybrid solar cell/fuel cell/battery power system[55]
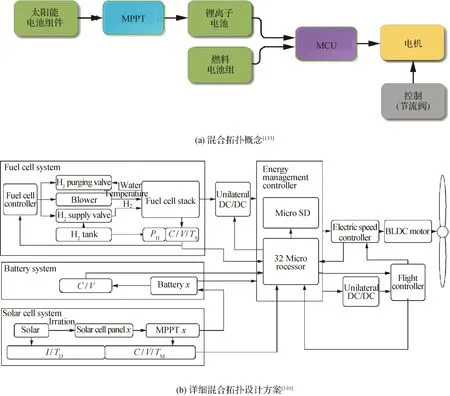
图32 两种太阳能/燃料电池/蓄电池混合拓扑Fig.32 Two topologies of hybrid solar cell/fuel cell/battery powered systems
燃料电池无人机的能源管理主要以燃料经济性为目标,电源健康工作条件一般作为约束条件。2008—2009年,佐治亚理工大学的Bradley等[106, 143]采用动态规划方法,以氢燃料消耗最小为目标,针对给定的简单定常工况,开展燃料电池和蓄电池之间最优功率分配研究。2008—2012年,克兰菲尔德大学的Karunarathne等[125]针对燃料电池/蓄电池混合动力无人机,从能源管理系统和电力系统2个层面对燃料电池动力系统进行管理,采用神经模糊控制方法对燃料电池进行控制[124, 144-145],采用PID控制方法对DC/DC的输出进行控制[146]。针对给定任务剖面划分5种飞行模式,制定3种燃料电池和蓄电池混合工作状态进行能源系统管理[126]。
2018年,张晓辉等[70, 80]建立了燃料电池/锂电池混合动力系统试验平台,提出了模糊控制能源管理策略,与被动策略和状态策略对比表明所提策略氢耗量最小,锂电池的充放电状态更为合理。2019年,戴月领[68]提出了燃料电池/锂电池混合动力系统模型预测能源管理策略,并建立了燃料电池无人机混合动力仿真试验平台,试验验证了所提模型预测控制策略的实时性和有效性。
Motapon等[147-148]针对应用于多电飞机(More Electric Aircraft, MEA)的燃料电池/锂电池/超级电容混合动力系统开展了能源管理策略对比研究。主要涉及自适应神经模糊控制策略、模糊逻辑控制策略、状态机控制策略、经典PI控制策略、频率解耦控制策略,以及等效燃料消耗最小策略共6种能源管理策略。
考虑系统的复杂性,目前燃料电池/太阳能电池/蓄电池混合动力无人机的能源管理策略主要是基于规则的控制策略。2012年,Lee等[55]针对其主动的拓扑结构方案,采用恒温器控制策略控制各个电源的输出功率,通过数学仿真验证了策略的有效性;同年,李延平等[133]采用有限状态机策略设计了7种系统工作状态,针对典型任务剖面,通过仿真验证了策略的功能性。此后,李延平等[79, 83]设计了相应的能源管理控制器,构建了三电混合的动力系统,通过地面试验验证了有限状态机策略的实时性和有效性。为了改善有限状态机控制策略局限性,2016年,张晓辉等[78]设计了能够进行主动功率控制的三电混合动力系统方案,在此基础上提出了基于规则的功率跟随控制策略,能够根据飞行剖面各阶段需求功率和能源系统状态,选择输出的电源组合,并对各电源功率进行分配。2018年,为了进一步改善策略的适应性,张晓辉等[149]提出了模糊状态机能源管理,将模糊控制引入对燃料电池和蓄电池的管理。

图33 太阳能/燃料电池混合多转换器拓扑方案[131]Fig.33 Topology of hybrid solar cell/fuel cell powered system with multi-converter[131]
2017—2018年,Gang等[76-77]设计了功率切换技术的混合能源管理策略,采用固态继电器控制燃料电池系统和太阳能电池系统中一个或两个系统输出以满足飞行需求,通过飞行试验验证了该策略的实时性和可靠性。
3 总结与展望
综上所述,近20年来轻小型太阳能、氢能无人机已经由新概念探索、关键技术攻关,正在迅速地向实用化、工程化迈进。相关的核心技术,如总体设计技术、轻量化能源技术、能源管理与控制技术等已经取得了突破性进展,相关的设计与验证的地面仿真平台和空中飞行平台已经逐渐形成。
面向军民用需求,轻小型太阳能、氢能无人机未来主要的发展方向有:
1) 轻小型电动无人机的长航时技术。① 充分发挥氢燃料电池能量密度高的优势,研制氢燃料电池无人机,或采用氢燃料电池对现有的油动、电动无人机进行长航时电动化改造;② 发挥太阳能电池无限能量的优势,均衡考虑太阳能电池能量/重量/价格等问题,研制小载荷下的环保太阳能无人机;③ 综合考虑能源特点,研制氢燃料电池/太阳能电池混合动力轻小型无人机,最大限度满足长航时需求。
2) 轻小型电动无人机的高有效载荷比技术。综合考虑气动特性、结构特型、太阳能电池片、储氢装置、动力装置等,开展气动/结构/能源/动力一体化总体设计方法研究,提升有效载荷比,实现轻小型新能源无人机的工程应用。
3) 高效能源动力系统控制技术。综合考虑太阳能电池、氢燃料电池、锂电池等多种能源,以及分布式动力系统,开展主动式能源动力系统的控制技术研究。
4) 能控/姿控/轨控一体化控制技术。综合考虑混合能源之间、能源与飞行姿态、飞行轨迹之间复杂的耦合关系,开展能控/姿控/轨控一体化控制技术研究。
