太阳能无人机能源系统的关键技术与发展趋势
2020-04-15朱立宏孙国瑞呼文韬李钏付增英于智航刘正新
朱立宏,孙国瑞,*,呼文韬,李钏,付增英,于智航,刘正新
1. 中国电子科技集团公司第十八研究所,天津 300384 2. 中国科学院 上海微系统与信息技术研究所,上海 200050
近年来,有关临近空间飞行器的研发兴起。资料显示,临近空间飞行器可以替代卫星的绝大部分功能,如通信、导航、农业、气象、测绘等。由于临近空间飞行器距离地面更近,它们因此具备卫星所不可比拟的成本优势和因距离产生的独到的技术优势[1-2]。在众多临近空间飞行器的研制中,临近空间无人机是其中的研究热点。常规无人机存在诸多不足,其中最主要的缺陷是空中停留时间较短,而造成这一问题的原因是常规无人机携带燃料有限且无法自制能量[3]。而太阳能光电技术的迅速进步,使得太阳能无人机获得了环境发电的能力,打破了常规无人机携带能源有限的限制,配合临近空间稳定的飞行条件,各国都纷纷掀起临近空间太阳能无人机的研发热潮,如“Zephyr”系列、“”Solara 50”“Aquila”“Helios”系列、“太阳脉动”系列和“彩虹”系列等[4-16]。由于太阳能无人机可利用外部环境自制能量,理论上续航时间几乎不受限制,但飞机依靠太阳电池发电能量来源单一且功率密度较低,储能电池组比能量的提升达到瓶颈、能源控制系统应对多变条件能力不足、边界条件限制、随机干扰因素过多等原因制约了飞机跨昼夜飞行的能力[17-19]。因此,突破现有太阳能无人机能源系统供电能力的瓶颈是目前太阳能无人机能源系统设计的当务之急,本文详细阐述太阳能无人机能源系统的组成、关键技术以及未来发展趋势,为未来飞行器的设计提供参考。
1 能源系统发展现状
太阳能无人机能源系统(如图1所示)一般由太阳电池阵、储能电池及能源控制系统构成[19],本节主要针对太阳能无人机用的太阳电池与储能电池的发展现状进行阐述。
1.1 太阳电池
临近空间飞行器一般采用柔性、轻质、高效能太阳电池作为发电单元,而满足这样特征的太阳电池种类主要有非晶硅(α-Si)薄膜太阳电池、铜铟镓硒(CIGS)薄膜太阳电池、柔性多结砷化镓(GaAs)薄膜太阳电池以及晶体硅异质结(SHJ)电池、交叉背接触(IBC)电池、钝化发射极及背局域接触(PERC)电池等超薄晶体硅太阳电池,上述几种太阳电池的性能指标如表1所示[20-31]。
从多年行业发展情况看,非晶硅太阳电池和铜铟镓硒太阳电池性能提升幅度有限,国内相关产业配套不完整限制了其进一步发展。柔性砷化镓太阳电池综合性能未来发展潜力最大,但目前由于产量较低造成成本较高,随着产业化水平提升其成本将逐渐降低。SHJ、IBC及PERC这3种电池均采用超薄单晶硅作为基材制作,但PERC电池和IBC电池由于电池结构不对称,且需要经过多道高温处理工序,产生的热应力会导致电池片弯曲,易破碎,产品成品率较低。其中IBC太阳电池由于其特殊结构,背面栅线必须达到一定密度才能保证串联电阻最低,这又造成其电极重量无法减轻。SHJ电池采用对称结构、异质结PN结设计和低温工艺制造,在3种晶硅电池中是最容易实现高效、超薄、超轻、高柔性的技术方案。综上分析,对于太阳能无人机应用前景较好的太阳电池种类为砷化镓电池和SHJ电池。
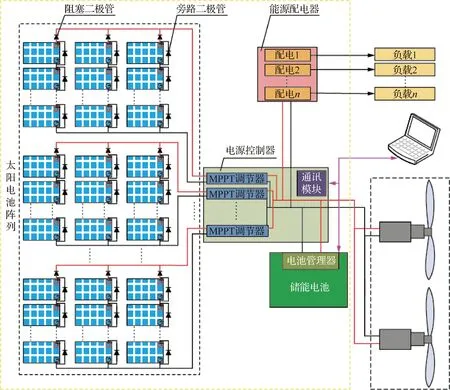
图1 太阳能无人机能源系统组成Fig.1 Composition of solar powered unmanned aerial vehicle energy system
表1 临近空间飞行器应用的太阳电池性能指标总结[20-31]
Table 1 Summary of solar cell performances applied for near space vehicles[20-31]

电池种类理论效率/%(AM0,1 353 W/m2)目前效率/%(AM0,1 353 W/m2)理论效率实现程度/%目前单体太阳电池面密度/(g·m-2)目前单体太阳电池比功率/(W·kg-1)目前太阳电池柔性度非晶硅25728170557可弯曲180°以上铜铟镓硒28PI衬底:10不锈钢衬底:14.251PI衬底:170不锈钢衬底:800PI衬底:796不锈钢衬底:240可弯曲180°以上砷化镓3831811702 467可弯曲180°以上SHJ2620.5792331 190可弯曲120°IBC262181320888可弯曲40°PERC2618.7572300845可弯曲70°
1.1.1 砷化镓太阳电池
与硅太阳电池相比,砷化镓太阳电池具有转换效率高、耐高温、抗辐射性能好和可制成全柔性电池等优点。近年来,新兴的柔性多结砷化镓薄膜太阳电池采用倒装晶格失配(IMM结构)结构制作,并配合外延剥离技术(Epitaxial Lift Off, ELO)进行柔性化处理,即在砷化镓衬底上外延生长GInP/GaAs/InGaAs等子电池,然后剥离并转移到柔性衬底上[21-22]。如图2所示,由美国Micro Link公司研制的最新一代柔性砷化镓太阳电池比功率超过1 500 W/kg,面功率超过350 W/m2(AM1.5,1 000 W/m2)[21],并应用至了空客Zephyr S太阳能无人机项目上。如图3所示,由中国电子科技集团公司第十八研究所研制的全柔性砷化镓太阳电池组件面密度为415 g/m2,
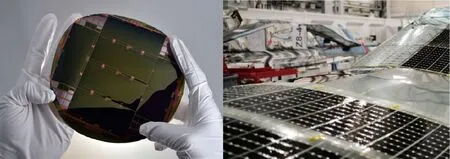
图2 Micro Link公司研制的多结砷化镓太阳电池[21]Fig.2 Multijunction GaAs solar cell developed by Micro Link[21]
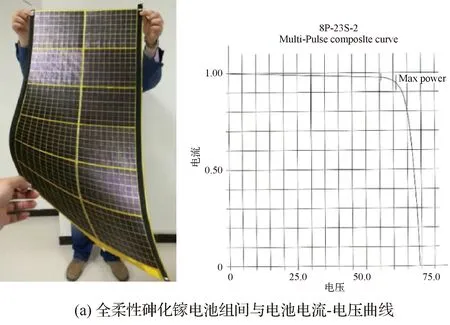

图3 中国电子科技集团公司第十八研究所 研制的砷化镓电池组件Fig.3 GaAs cell module developed by Tianjin Institute of Power Sources
半硬式砷化镓太阳电池组件面密度为550 g/m2,效率超过29%(AM0,1 353 W/m2,25 ℃)。但是,作为新型高效电池其产业配套处于起步阶段,应用成本在短时间内仍较高。
1.1.2 晶体硅异质结(SHJ)太阳电池
晶体硅异质结太阳电池是一种高效太阳电池,由日本三洋公司发明[25-26]。2011年该技术被引入中国,经过8年的发展已经实现国产化。国内中科院上海微系统与信息、技术研究所研制的超薄SHJ太阳电池的实验室最高转换效率达到24%(硅片厚度85 μm),产业化效率22.5%(硅片厚度95 μm)。SHJ电池利用薄膜硅电池技术,在晶体硅表面分别沉积超薄非晶硅薄膜叠层(每层厚度约5 nm)以及透明导电氧化物(约100 nm),加上金属电极制成具有对称结构的晶体硅/非晶硅异质结太阳电池,如图4所示,图中TCO为透明导电膜;p/i a-Si为p型/本征非晶硅;i/n a-Si为n型/本征非晶硅;n type c-Si为n型单晶硅(表面结构)。
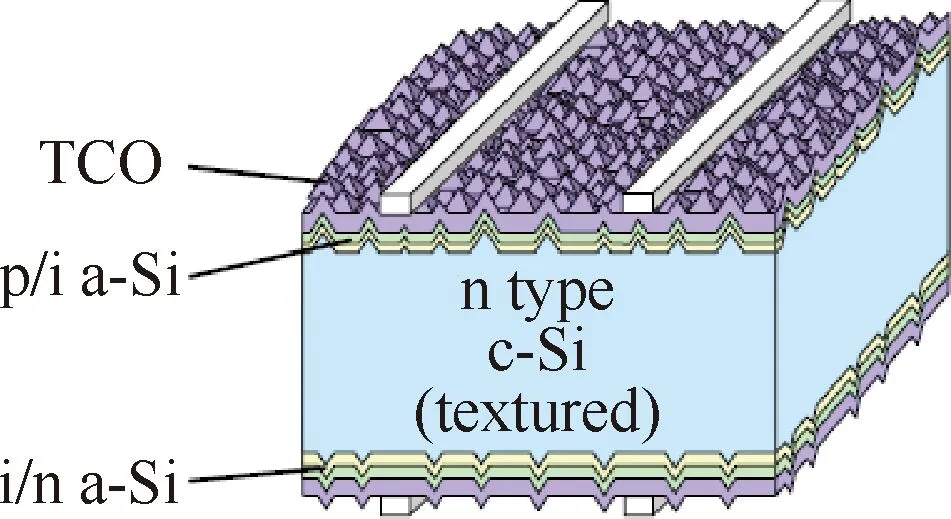
图4 SHJ太阳电池结构示意图Fig.4 Schematic diagram of SHJ solar cell
由于SHJ太阳电池制作过程工艺温度低于200 ℃,避免了制作过程中由于高温热应力导致的硅片弯曲,降低了硅片破损的风险,成品率达到98%以上;具有两面对称结构,适宜于减薄,厚度为100 μm的电池依然保持较高的转换效率;高效、超薄、柔性的双面发电SHJ电池已经实现量产。如图5所示,由中国电子科技集团公司第十八研究所研制的SHJ太阳电池组件平均面密度为540 g/m2,平均效率为21.3%(AM1.5,1 000 W/m2),单个组件最大尺寸达1.3 m×0.91 m,已实现产品应用。

图5 中国电子科技集团公司第十八研究所研制的 SHJ电池组件Fig.5 SHJ cell module developed by Tianjin Institute of Power Sources
1.2 储能电池
储能电池的比能量高低决定着太阳能无人机是否能够越夜飞行,循环寿命决定着太阳能无人机是否能够进行几周甚至上月的长航时飞行。目前长航时太阳能无人机使用比较成功的储能电池为锂硫电池和纳米线结构硅负极锂离子电池。
1.2.1 锂硫电池
美国Sion Power公司2004年研制的高能锂硫电池[32]比能量达到250~300 W·h/kg,可循环300周期。2010年Sion Power公司成功地将其研制的锂硫电池应用于由英国Qineti Q国防科技集团研发的高空太阳能无人机“Zephyr 7”,创造了无人机连续飞行14 d 22 min 8 s、飞行高度21 km、低温低气压应用环境等多项世界记录。所采用的Sion Power锂硫电池(如图6所示),单体额定容量2.5 Ah、比能量达到350 W·h/kg、循环50周期。

图6 太阳能无人机用锂硫电池组Fig.6 Lithium-sulfur battery applied for solar UAV
1.2.2 纳米线结构硅负极的锂离子电池
目前,美国Amprius公司已实现纳米线结构硅负极锂离子电池单体的批量生产[33],并配套给空客公司Zephyr SHAPS(高空伪卫星)无人机项目,电池重量能量密度大于435 W·h/kg,体积能量密度大于1 200 W·h/L。2018年7月11日,采用硅纳米线锂离子电池的Zephyr S太阳能无人机完成首飞,在飞行了25 d 23 h 57 min后于8月5日降落于亚利桑那沙漠,创造了飞行时间和飞行高度的非官方记录。
1.3 能源系统总结
目前太阳能无人机能源系统能够满足基本飞行要求[34]。但太阳能无人机要想实现实用化应用,有效载荷搭载能力至少为50 kg、飞行时间至少达到3个月,相应的太阳电池组件效率不低于30%(AM0,1 353 W/m2),储能电池单体比能量不低于450 W·h/kg,同时100%DOD循环寿命要达到100周期以上。
就目前国内外发展情况来看,砷化镓太阳电池组件效率最高可达到31%(AM0,1 353 W/m2),已基本满足实用化应用太阳能无人机的发电需求,但高比能锂离子电池的循环周期仅为30~50周期,在此之后电池比能量存在较大的衰减,与实用化太阳能无人机的技术要求存在较大差距,且短时间内很难突破。
2 关键技术发展趋势
储能电池的技术瓶颈限制了实用化应用太阳能无人机的长航时越夜飞行,拓宽能量来源、寻找太阳能无人机能源系统自身的优化方案是现阶段太阳能无人机能源系统发展的较优方案。
从能量获取角度分析,储能电池蓄电能力有限,不足以将白天太阳电池所发电力充分吸收,而夜间又无其他手段补充能量,这就降低了太阳能无人机的长时间飞行能力。若突破太阳能这种单一能源获取方式的限制,则会大幅提升太阳能无人机的续航能力。
从能源系统优化角度分析,临近空间太阳能无人机的大尺度机翼造成光伏发电能力差异大、负荷分布不平衡,使得飞机的能量调度以及协同控制难度加大,能源系统的整体利用率降低。若采用合理的智能化能量调度方案,则会大幅提升储能电池组的有效放电深度,同时降低能量网络中传输损耗,从而降低对储能电池组比能量的要求。
从任务角度分析,太阳能无人机实现通讯中继、电子侦测等功能离不开大口径、高性能天线,而传统天线由于太阳电池阵的屏蔽作用,在安装时挤占其安装面积,使能源系统与载荷系统无法同时达到最优,且突出的天线还会破坏飞机的气动外形影响升阻比,降低气动效率。若以平面阵天线技术为基础将太阳电池阵与天线阵一体化,则可同时实现载荷的轻量化、太阳电池阵布片面积最大化以及气动外形最优化,从而降低飞机对能源系统的整体要求,特别是储能电池比能量的要求。综合来看,在突破储能电池瓶颈前,现阶段太阳能无人机的主要发展方向为能量获取多元化、能源系统管理高效化以及能源载荷系统一体化。如表2所示,具体的可实施方向为无线传能技术、智能化能源系统以及太阳电池阵与天线载荷一体化。

表2 太阳能无人机能源系统的未来发展方向Table 2 Future development direction of solar UAV energy system
2.1 能量获取多元化
储能电池组储能能力有限、太阳电池发电功率密度低,制约着临近空间飞行器技术的发展,即太阳能无人机对能量来源问题解决方案的改变提出了迫切要求。如图7所示,拓展能量来源渠道、发展无线传能技术是未来支撑临近空间太阳能无人机长时驻空执行任务的有效途径之一。
基于对各类无线传能技术特点的调研分析(如表3[35-55]所示)可知,针对于临近空间太阳能无人机20 km级的飞行高度,适合的传能方式为激光无线传能与微波无线传能。

图7 无线传能示意图Fig.7 Schematic diagram of wireless energy transmission

表3 各类无线传能技术的特点分析[35-55]Table 3 Characteristic analysis of various wireless energy transfer technologies[35-55]
2.1.1 激光无线传能技术
激光无线传能技术具有指向性好、光电接收面积小和传输距离远等特点,适用于远距离传能应用领域[44-50]。近年来,美国、日本、欧洲等国家纷纷开展了无人机激光无线能量传输技术的研究(如图8[43]所示)。2005年,美国国家航空和宇宙航行局的马歇尔空间飞行中心利用强激光(输出功率500 W、输出波长940 nm)对15 m以外微型飞行器表面的三结Ga:In:P2光电池进行照射,实现对微型发动机供电(6 W)并保证了其正常工作。2012年,美国洛克希德·马丁公司与美国激光动力公司成功试验了一种新型激光能量传输系统对“潜行者”(Stalker)无人机室外无线传能,实现了无人机连续48 h的空中飞行[45-46]。

图8 激光无线传能[43]Fig.8 Wireless transmission of laser energy[43]
2.1.2 微波无线传能技术
微波无线传能技术是以地球与大气电离层作为谐振器,使两者之间发生低频谐振向外发射频率8 Hz的电磁波,利用可在空间内使用的接收天线自由接收电能[51-55]。在1964年Brown首次成功验证微波动力直升机后,美国、日本等国家纷纷开始了无人机微波无线传能技术领域的研究。1992年,日本“MILAX”研制了2.411 GHz的微波驱动飞机,实现了25 m的无线充电飞行。2006年,美国NASA Longley研究中心探索了微波无线传能技术在高空飞行器中的应用,并针对高空飞行器提出了2种应用模式:第1种是当白天太阳辐射充足时,利用微波无线传能技术将高空飞行器中多余的能量传输给下方的小型无人机供电;第2种模式是晚上依靠电池供电时利用微波无线传能技术从地面向高空飞行器供电,支持其完成各项夜间任务[54-55]。
综上所述,这2种无线传能技术均有应用至临近空间太阳能无人机的可能性。对比2种技术发现,激光无线传能方式的指向性好,有利于临近空间无人机的能量收集,技术成熟高,但激光在大气中的传输效率较低[41];微波传能技术在大气中传输效率近乎100%[41],但远距离传输时接收系统需要较大的接收口径,很难在无人机上进行安装。此外,微波产生的GHz级别的交流电整流技术不成熟也影响了该技术的应用[51-52]。因此,未来完成微波聚集、高频交流电整流等关键技术突破后,微波无线传能更具潜力。但现阶段来看,无人机领域发展激光无线传能具有着更强的可实施性。总体来看,根据技术进步周期,太阳能无人机的无线传能技术发展可划分为2个阶段:
1) 前沿探索与可行性论证阶段
全面理清未来临近空间飞行器应用无线传能技术的技术体系组成,基于无线传能技术的理论分析、模拟仿真和关键技术探索,论证分析激光、微波无线传能技术的潜在发展空间。针对面向临近空间的各类应用场景,通过理论建模与探索性科学实验相结合,依次研究近程(数百米级)、中程(数千米级)、远程(数千千米级)无线传能技术理论可行性以及技术可实现性,提出应用至临近空间太阳能无人机的无线传能方案与技术发展路线,原理验证技术方案的可行性。
2) 关键技术攻关与系统集成演示阶段
激光无线传能技术:突破高电光效率激光器设计、多光束高效合成、高效率光束扩束与准直设计、高效率光电转换半导体材料设计与合成、高效率太阳电池器件制备、激光传输链路识别等关键技术,形成传输功率千瓦级至百千瓦级、地面及临近空间传输距离1~10 km、传输效率10%~20%的中远距离激光传能能力,形成激光传能系统整机的批量制造生产能力。
微波无线传能技术:突破聚焦发射阵列天线技术、大功率发射天线阵列设计、高效率电磁表面接收、高性能二极管设计与制造、高效率整流电路设计以及通信系统频率干扰解决方案等关键技术,形成传输功率千瓦级至兆瓦级、传输距离(地面-临近空间、临近空间-临近空间)5~20 km、系统传输效率20%~30%的微波无线传能能力。
2.2 能源系统管理高效化
目前,太阳能无人机能源系统仍不能很好地兼顾能量平衡、功率平衡、重量平衡三方面要求,严重制约着能源控制系统性能的提高。在临近空间太阳能无人机实际运行过程中,为保证能源系统对多种载荷用电需求的支持,控制系统中不得不大量增加导线、变流器、储能电池等设备的数量,由此造成系统整体重量增加,降低了系统效率[56-59]。具体来说,现有能源控制系统存在如下缺点:① 太阳电池阵、储能电池布局尺度大,载荷种类多样且安装位置分散,导致电力传输线距离过长,线路损耗大;② 光照条件的不确定性导致充放电过程难以预测,储能电池特性各异导致多次充放电后电池不一致性增加,放电深度降低,供电能力下降;③ 过多的电池放电安全余量、大量的直流变流器单元增加了能源系统的重量,降低了飞行器的有效载荷,同时对电池供电能力提供了更高要求,二者相互制约。
为解决上述能源控制问题,提升能源系统的效率,首先进行太阳能无人机在复杂工况下的系统运行模式分析,其次进行能源系统的优化设计,建立系统的拓扑模型和能流模型,以能量平衡及能流高效为优化目标,分析多目标优化问题,在线求解,智能调度。最后,围绕软件控制策略完成能源系统硬件设计制造。具体实现方法如下:
1) 复杂工况下的系统运行模式分析
在时间尺度上,每一时刻点的控制目标是供需功率平衡,全天时间尺度上系统控制目标是能量平衡,但在实际运行时载荷需求引入的扰动,太阳电池阵全天发电能量的不均衡性,储能电池蓄电能力和充放电倍率约束均会使这2个控制目标无法兼顾,造成有些时段、有些模块能量吃紧无法充电,而有些时段还可能出现能量过剩储能电池无法吸收的现象。所以,应研究合理的能量调度规则在满足系统功率平衡前提下均衡充/放电,使系统运行效率达到最高,这样在整个白天这个尺度上系统的控制目标是储能电池组以大致相同的速度充满电来实现能量平衡,为夜间工作做好准备。同理,在整个夜晚这个尺度上系统控制目标是储能电池以大致相同的速度放电,以基本一致的状态迎接第2天的充电过程。而功率平衡作为整个控制过程的约束条件,关键研究点包括多个体系统协同控制技术、执行器饱和情况下的储能单元均衡充放电技术以及功率网关系统的构建。
2) 系统控制模型的建立及其控制方法
能源系统建模过程为首先建立能源系统的静态连接模型,结合图论的拓扑变换方法后,确定多元发电及用电结点之间的静态网络联络模型。之后,建立能源系统的动态能流模型,研究数据与机理融合建模方法。最后,建立微观导纳模型与宏观能流动力模型,为能源系统的智能调度提供方法论。
结合太阳能无人机发电单元、储能单元、用电单元的关系以及大尺度临近空间无人机的特点,其能源系统控制模型应构建为多个体系统,采用分布式协同控制方法实现各个模块间的协同工作,进而达成系统均衡与能量供需平衡的控制目标。分布式协同控制策略不需要独立的决策和控制中心对每个结点单元进行控制,而是每个结点单元通过局部信息交互独立地实现周围一定区域内的结点协同工作,依赖覆盖所有结点的网络连通性将网络内的全部结点有机地联系起来,实现全网络的协同。
3) 控制系统硬件构建原则
太阳能无人机能源控制系统硬件应以运行可靠性、配置灵活性、负荷匹配、轻质化等为准则,通过理论研究、软件仿真、半实物模拟等途径,研究遵循“模块组合、分层布置、分区供电、跨区调度、智能自治”设计理念的拓扑结构和工程实现方法。
2.3 能源载荷一体化
临近空间太阳能无人机利用其高空低速性能容易实现通讯中继、电子侦测等功能,这些应用都离不开大口径、高性能天线。传统天线由于太阳电池阵的屏蔽作用在安装时必会挤占能源系统安装面积,使能源系统与载荷系统都无法达到最优,且突出的天线还会破坏无人机的气动外形影响升阻比,降低气动效率。针对这一问题,未来的解决方案是采用平面阵天线技术为基础将太阳电池阵与天线阵一体化。如图9所示,近年来国内外学者针对光伏天线展开了广泛研究,主要分为以下几类:① 间隙型光伏天线;② 贴片型光伏天线;③ 集成太阳翼的平面反射阵天线;④ 透明太阳能平面反射阵天线;⑤ 超材料光伏天线;⑥ 偶极子光伏天线[60-67]。
就当前研究现状来看,光伏阵列和天线阵列结构一体化研究已经较为广泛,出现了多种结构形式。但大部分设计都将太阳电池作为反射板使用,天线和馈电结构需要单独加工,无法实现太阳电池和天线真正的融合,不仅产生了额外费用,也增加了系统复杂度和不稳定性。仅有少数研究开始尝试将太阳电池作为天线辐射主体使用,但是这种新型设计处在起步阶段,相关技术仍处于学术研究阶段,也没有充分考虑实际应用中太阳能发电系统和天线系统的兼容性问题。因此,结合太阳能无人机的特点,光伏天线未来发展的关键技术可分为如下3点:
1) 解决太阳电池的微波交流等效电路模型缺失的科学问题。通过研究太阳电池的多层结构,特别是外延层在微波频段下的电导率和损耗等电磁特性分析,以及太阳电池对有无光照条件下不同交流等效电路模型的差异,明确太阳电池作为微波天线主要辐射结构的可行性问题。
2) 解决太阳电池和微波天线一体化设计的可行性问题。未来可采用现有太阳电池作为天线的辐射主体,实现太阳电池和微波天线的结构/功能一体化。
3) 解决太阳电池和微波天线的交流和直流信号电磁兼容性问题。现有一体化光伏天线面临的关键问题是如何解决太阳电池直流端口和微波端口的相互耦合问题,未来可提出一种采用表面封装器件的低成本滤波器电路设计方案来解决交直流电路的兼容性问题。

图9 光伏天线的组成类型Fig.9 Composition type of photovoltaic antenna
3 结 论
作为探索临近空间领域的新兴飞行器,太阳能无人机有良好的发展前景,其能源系统仍制约着太阳能无人机的航时及可靠性,以致于现阶段仍无法使其大范围应用工程。现阶段太阳能无人机能源系统的主要关键技术及发展趋势如下:
1) 储能电池技术暂时无法满足需求且技术发展遇到瓶颈,能源系统可利用体积、面积受制约,分布式能源系统能流调度策略匮乏不具备智能性是目前中大型太阳能无人机能源系统的发展瓶颈。
2) 能量获取多元化、能源系统管理高效化、光伏与天线载荷一体化是未来临近空间太阳能无人机能源系统的发展趋势。
