高超声速飞行器底层性能评价指标的可行性分析
2020-04-15朱鸿绪刘燕斌曹瑞陆宇平汤佳骏衣春轮
朱鸿绪,刘燕斌,曹瑞,陆宇平,汤佳骏,衣春轮
1. 南京航空航天大学 自动化学院,南京 211106 2. 南京航空航天大学 航天学院,南京 210016 3. 北京航空航天大学 虚拟现实技术与系统国家重点实验室,北京 100083
高超声速飞行器的强耦合性、强不确定性、飞行环境复杂和强非线性等特点,对控制性能提出了很高的要求[1]。若缺乏有效的控制性能评价,则可能会导致严重的后果,例如美国X-43A验证机的首次试飞失控是由于不确定性超出控制系统稳定性边界[2]。控制性能评价不但可以辅助控制系统设计,提高控制性能,进而有效地降低故障发生率[3],而且还能在飞行器研制初期弥补实物仿真周期长、成本高的缺陷。因此,面向实际飞行任务,合理地评价高超声速飞行器的控制性能具有极为重要的意义。
高超声速飞行器的控制性能评价包括两部分:分析飞行任务对控制性能提出的要求和制定合适的评价方法。目前,对于控制性能要求的研究已取得很大的进展。文献[4]计算了下一代高超声速运输机再入段颤振边界并分析了稳定性,为控制系统的设计提出了明确的要求。文献[5]提出了高超声速飞行器再入段飞行品质分析的标准化框架,可用于多种类型高超声速飞行器多个飞行阶段的飞行品质分析。文献[6]研究了输入饱和及带宽限制下的闭环性能边界问题,对合理的飞行任务规划具有重要的意义。根据性能要求设计控制器[7-8]及优化飞行器[9]等工作正在同步展开。此外,控制性能评价方法的研究目前也取得一定进展,文献[10]基于层次化分析的思想,结合定性分析和定量评估,提出了制导与姿态控制性能综合评估验证系统的框架。文献[11]在文献[10]提出的层次分析基础上,将其和熵值法相结合进行定量的性能评估,进一步提高评价结果的可信度。
需要指出的是,目前高超声速飞行器控制性能评价的研究主要集中于评价方法的建立,对评价方法的有效性验证缺乏足够的重视。从现有研究成果可以看出,研究者更关注评价指标体系的建立和底层指标权值的赋予,却忽略了以下几个问题:底层指标是否能够完全涵盖飞行任务要求?参数不确定性的摄动是否会造成底层指标评价结果变化过于剧烈?为此,本文提出了检验底层指标合理性的分析方法,并设计了适合高超声速飞行器的分析流程。
为了判断底层指标是否可用于控制性能评价,需要确立底层评价指标和任务要求之间的映射关系,这是可行性分析的难点之一。底层指标应该是飞行任务执行之前可以测量或估计的参数,由于飞行器闭环模型的复杂性和不确定性,底层指标到任务要求的映射并不一定能够解析表示。运用近似解析的方法研究高超声速飞行器运动特性在巡航段和无动力再入段已经取得了一定的进展[12-13],但若要将其推广到更为一般的飞行任务,还有诸多技术问题需要解决。相比之下,应用统计实验分析的方法揭示映射关系,不但适合一般飞行任务,而且操作相对简单。基础的统计实验分析是借助仿真实验获得包含任务性能和对应底层指标的数据集,进而利用拟合等数值方法分析映射关系。定量刻画映射规律是分析的难点所在,需要用到各种数据处理方法,机器学习是其中的一类代表。机器学习在系统科学中的应用主要是基于实验数据学习系统的内部规律,它可以在样本数据集内对映射关系进行较高准确率的拟合,目前已经在飞行器的相关研究中取得良好的成果。文献[14]构建贝叶斯最优网络估计高超声速飞行器动压和气动加热模型。文献[15]结合贝叶斯优化与深度高斯过程预测空天飞行器非平稳超参数。然而,不论是机器学习还是其他方法,基于数据的分析由于缺乏物理可解释性等原因,一直被认为是复杂系统研究的辅助工具,暂时难以在工程应用中实现大范围推广。在解析法可用的条件下,应该优先选择解析法求取底层评价指标到任务要求的映射关系。
本文首先针对高超声速飞行器的模型特性进行分析,从运动模态、飞行约束和不确定性3个方面说明了高超声速飞行器和常规飞行器的差异。考虑到常规飞行器的性能评价方法可能不适用于高超声速飞行器,本文提出底层指标应满足的要求,将问题转化为研究从任务变量到底层评价指标的映射。进一步,针对可能存在的映射关系难以给出解析形式的情形,本文首先提出了一种统计实验分析的方法。然后,基于高超声速飞行器的特点,拓展了统计实验分析方法的功能,并以此为基础,设计了适合高超声速飞行器的底层指标评价可行性的分析流程,进而将阻尼频率特性用于高超声速飞行器静稳定性评价的可行性分析作为示例,展示了流程的设计步骤。然后,将分析方法拓宽到特定飞行任务,提出时域性能指标的可行性检验方法。最后,设计仿真实验验证频域指标评价静态性能的可行性,得到和军标MIL-F-8785C[16]一致的结论。
1 高超声速飞行器模型特性分析
在常规飞行领域,已经形成了包括飞行品质规范在内的完整开环/闭环性能评价体系。然而常规飞行器的性能评价方法不一定适用于高超声速飞行器,这是因为两者在结构外形、飞行空域、是否有人驾驶、运动模态组成以及不确定性来源与影响上都存在较大的差异。为了合理地评价高超声速飞行器的控制性能,不断有新的评价方法被提出。无论是何种评价方法,都要立足于高超声速飞行器本身,分析包括本体的稳定性和配平能力,以及在不稳定的条件下判别所设计控制系统的好坏。因此,高超声速飞行器的模型特性分析是必不可少的,在建立控制性能评价方法时,需要重点考虑其与常规飞行器的差异。本文将从模态特性、飞行约束以及不确定性3个方面阐述高超声速飞行器模型的独特之处。
1.1 纵向模态特性
根据定义可知,划分高超声速飞行器和常规飞行器的基准是飞行马赫数,高超声速飞行器要求飞行马赫数达到5以上。更高的速域造成两者在模态特性上存在较大的差异。高超声速飞行器除了沉浮模态和短周期模态以外,还多出一个额外的高度模态[17]。高度模态由高度变化引入,是一种非周期性的运动模态。对于低速飞行器,由于其高度变化相对缓慢,因此高度模态在常规飞行器的研究中是被忽略的。高度模态对高超声速飞行器的速度和高度响应产生较大的影响,因此是不可忽略的。常规飞行器的飞行品质规范仅对短周期模态和沉浮模态做出要求,从高度模态的角度而言,这种评价方法至少是需要补充的。
事实上,就算是高超声速飞行器和常规飞行器共有的沉浮模态,不同速域下其模态特性也不尽相同。沉浮模态的主要影响因素是高度和速度,而常规飞行器的沉浮模态仅需考虑速度的影响。这是因为低速飞行时,空气的压缩效应不够明显,而且由于高度变化比较缓慢,大气密度梯度也可以不用考虑。在这种条件下,高超声速飞行器是否仍然可以采用常规飞行器的评价方法,需要进一步讨论。
1.2 飞行约束
相比常规飞行器,高超声速飞行器需要考虑更多更复杂的约束,包括动压约束、热流约束、过载约束、迎角约束、执行机构约束,等等。这些约束里,有一部分属于高超声速飞行器所特有,比如迎角约束;另一部分虽然两者都考虑,但方式是不一样的,比如执行机构约束。
本文所讨论的高超声速飞行器为吸气式高超声速飞行器,其推进系统为超燃冲压发动机。它使得高超声速飞行器具有推进-气动耦合的特点。具体来说,迎角会影响进气道内气体流动,进而影响发动机的工况;而超燃冲压发动机的燃气尾流膨胀波除了提供推力,还将产生升力或者俯仰力矩,这样又会反过来影响飞行状态。为了避免进气道未起动,高超声速飞行器的迎角需要维持在一定范围内,即所谓的迎角约束。
高超声速飞行器的纵向控制机构包括升降舵和油门,通常将升降舵偏转角δe和燃油当量比φ作为控制输入。由于高超声速飞行器的飞行包线大,当飞行高度很高时,升降舵的效能下降很明显。因此,无论是设计飞行轨迹还是控制器,都要预留一定的控制裕度,防止升降舵偏转饱和。此外,文献[18]还指出,为防止超燃冲压发动机的热壅塞,油门的开度需要维持在容许的范围内。
高超声速飞行器在加速爬升和再入的过程中,存在强烈的大气压缩及机体摩擦,使得飞行器的表面温度会很高。与此同时,大气压也会对飞行器的外形产生影响。为了保证飞行器在爬升和再入过程中机体不受损坏,必须对的动压、热流率、过载做一定的约束。动压约束是具有上下界的,其上界是由飞行器表面防热材料决定的,其下界则取决于发动机进气道起动的要求。热流密度应维持在飞行器表面温度不超过防热材料允许的范围。过载约束则是为了保证高超声速飞行器的布局结构不被破坏。
综上,高超声速飞行器的飞行约束是相当复杂的,它和常规飞行器存在明显的差异。常规飞行器的评价体系并不能完全用于对高超声速飞行器的评价。
1.3 不确定性
高超声速飞行器的另一显著特点是具有强不确定性,它会影响状态观测、性能预判以及飞行约束。不确定性根据其来源包括但不限于以下几类,即未建模不确定性,模型结构不确定性、数值不确定性和模型参数不确定性。未建模不确定性是指人们对于物理原理本身存在认识上的欠缺,在建模时难以考虑,从而造成模型和实际系统的偏差,例如,高超声速飞行器在气体流动方面还存在物理原理的认知缺乏,部分动态特性在模型中没有得到体现。模型结构不确定性指的是建模过程中,出于简化的目的,提出一些近似假设,从而造成所建立的模型和真实系统的偏差,例如,为设计线性控制器,对高超声速飞行器非线性系统进行线性化处理,所得到的线性系统就存在模型结构不确定性。数值不确定性包括数值计算中的误差以及人为因素导致的取值偏差,例如,高超声速飞行器存在输入饱和约束,当控制输入的理论值超出执行器范围时,实际输入会和理论输入产生偏差,引入数值不确定性。模型参数不确定性的来源包括精确数据或相关模型参数的缺乏,例如,由于缺乏相关气动数据,高超声速飞行器的气动参数就存在模型参数不确定性。
需要注意的是,当采用给定的评价方法分析高超声速飞行器开环或闭环性能时,因为存在强不确定性,评价结果可能会受到干扰。如何克服强不确定性的影响,也是建立评价方法需要考虑的问题。
1.4 底层指标可行性的表述
高超声速飞行器的模型特性分析表明,常规飞行器的性能评价方法可能未必适用于高超声速飞行器。在引入新的性能评价方法的同时,需要分析其可行性。完整的高超声速飞行器控制性能评价体系需要考虑比常规飞行器更多的底层性能指标,根据实际任务需求,对底层指标进行加权,得到顶层评价指标。顶层指标因为任务不同而对底层指标的侧重有所不同,本文对此不做讨论,重点研究底层性能评价指标的有效性。合适的底层评价指标应满足以下两点:
1) 完全覆盖:底层指标应完全覆盖高超声速飞行器包括飞行约束在内的各项控制性能。
2) 抗不确定性扰动:所选择的底层指标受不确定性的干扰应尽可能小。
底层评价指标直接采用任务要求固然是一种思路,但必须要注意的是,这一做法存在多个问题。首先,不同的高超声速飞行任务有不同侧重点,在设计飞行器的初期,甚至在结构外形尚未确定的情况下,将复杂的要求一一考虑是不现实的,此时设计者希望参考一些和系统相关的指标,包括阻尼频率特性、超调量和时延特性等。其二,任务执行情况在进行飞行实验之前是未知的,将其作为底层评价指标就失去了预估的初衷。
2 底层指标的可行性分析
为分析底层指标对于高超声速飞行器控制性能的评价可行性,本节提出一种研究思路:建立高超声速飞行器的飞行任务性能到底层评价指标的映射,将可行性分析转化为对于映射的分析,如果该映射可以满足双映射检验,那么底层评价指标是有效的,下面将说明这一思路的合理性。
2.1 双映射检验方法
第1节指出,如果底层评价指标是可行的,那么它首先需要满足完全覆盖控制性能这一要求。假设飞行任务对n个线性无关变量的取值做出要求,称该任务为n元任务。高超声速飞行器是强耦合、具有不确定性的非线性系统。假定任务对某些飞行状态变量(如速度、高度、迎角等)做出要求,这些变量之间虽然存在耦合关系,但在满足小扰动假设时可以进行线性化或分段线性化处理[19]。如果线性化后得到的状态特征矩阵是非奇异的,这时,每个状态变量都不能由其他状态变量线性表出,那么状态变量就满足线性无关假设。记这n个状态变量张成的线性空间Πn=span(W1,W2,…,Wn),其中Wi(i=1,2,…,n)表示任务变量。对应的,记底层评价指标张成的线性空间为Λl=span(I1,I2,…,Il),其中Ii(i=1,2,…,l)表示底层评价指标。于是,可以得到底层评价指标完全覆盖高超声速飞行器的控制性能要求的数学表述,即底层评价指标空间Λl可以通过某种映射l,形成包含n元任务变量空间Πn的线性空间Π。
从包含与被包含角度来说,评价指标的维度l一定不小于任务变量的维度n,而对于线性映射,评价指标和任务变量同维是可以做到的。假设映射l具有连续性,根据拓扑同胚的观点[20],在所有l个底层评价指标中,总存在n个底层评价指标组合张成的线性空间Λn=span(Iλ1,Iλ2,…,Iλn),与n元任务线性空间Πn线性同构,其中Iλi(i=1,2,…,n)是n个线性无关的底层评价指标的线性组合。这样,n元任务理论上只需要n个线性无关的底层评价指标即可。本文主要考虑底层评价指标和任务变量维度一致的情形,此时,如果从任务变量空间到底层指标空间的映射(从底层指标空间到任务变量空间的映射亦可)为双映射,那么底层指标确实涵盖了高超声速飞行器的各项任务性能。当底层评价指标的维度大于任务变量时,可采用机器学习等数据处理方法拟合映射关系,再检验映射是否为满足完全覆盖和抗不确定性扰动条件。
如1.4节所述,底层评价指标还应该满足抗不确定性扰动的要求。这需要分析不确定性对映射的影响。如果映射关系可通过解析表达式明确给出,那么只需检验映射是否双映射以及是否病态即可。然而,映射关系可能很难写成解析形式。考虑到实际问题中,任务变量、控制律参数以及底层评价指标的取值集合都是紧集,即取值范围是可以度量的,于是本文采用一种统计实验分析的方法来判断映射是否为双映射。在提出检验方法之前,首先给出下述定理。
定理 给定映射f:x→y,x∈σ,y∈Σ,σ和Σ分别是定义域和值域。σa是定义域σ的同维子集,记σa的补集为σb,且有f:σa→Σa,f:σb→Σb。若对于任意σa,都满足:
(1)
则f:σ→Σ是双映射。这里V(*)表示高维空间中封闭区域的体积。
证明 根据双映射的定义,同时满足单映射和满映射即为双映射,因此分2步证明。
1) 因为Σ是值域,所以f:x→y,x∈σ是满映射。
2) 令Σa∩Σb=Σx,η=V(Σx)/V(Σ)。对于任意x1,x2∈σ,x1≠x2,存在σa,使得x1∈σa,x2∈σb。因为η≡0且η=V(Σx)/V(Σb),所以Σx=∅,即f(x2)∉Σa。而f(x1)∈Σa,所以f(x1)≠f(x2)。这样f:x→y,x∈σ是单映射。
综上,f:σ→Σ是双映射。
为了方便理解上述定理,图1给出了二维向量空间映射的示意图。定理可表述为,如果线性空间中任意两个不存在交集的区域,映射后仍不存在交集,那么映射是双映射。定理证明中的η表示Σa和Σb重叠部分Σx占Σ的比重,特别地,如果用样本点来估计定义域σ中全体点的行为,η可用如下方法计算:
(2)
式中:nx为落在重叠部分实验点的数目;nt为内实验点的总数。关于η的物理意义,可以从二分类问题的角度来考虑:记σa中实验点为正例,σb中实验点为反例,由于某种原因需要依据映射后Σ区域内实验点的分布来预测正反例,σa中实验点经过映射后,形成包络Σa,对于任何落在Σa内的实验点都预测为正例,这样,存在部分真实为反例的实验点被错误预测,η就代表预测错误的实验点在全体实验点中的占比,即错误率[21]。

图1 二维线性空间情形下的定理示意图Fig.1 Application of theorem in two-dimensional linear space
错误率η不仅反映了是否双映射,还反映了映射抗不确定性扰动的能力。双映射应满足一一对应的要求,而不确定性的介入,使得定义域子集σa内的实验点经过映射后,与其补集σb内的实验点的混杂程度提高,即错误率η增大。若这种混杂程度越高,那么底层指标对于参数不确定性越敏感。因此,可以通过上述定理设计分析底层评价指标可行性的双映射检验方法。
这里还存在一个问题:定理中要求σa是定义域中的“任意”同维子集,如何满足“任意”这一条件。本文采用的解决思路如下:将定义域随机划分为若干子集,每次在其中选取部分子集构成σa,剩余子集构成σb,进行一次检验,每次检验完成后重新选择σa和σb进行新一轮检验,如此重复多次。从理论上分析,划分的子集越小,重复检验的次数越多,结果的真实性越高,但实际应用中需要考虑计算成本以及σa和σb的物理含义,并不是重复实验次数越多越好。需要注意的是,只有每次统计实验的结果都能得到η≪1,才认为通过可行性分析;只要出现实验结果得不到η≪1,就认为没有通过可行性分析。这里η≪1是定性分析的要求,定量实验中的判别准则需要指定错误率容许上界ε,可借鉴统计学中显著性检验的思路:选择0.05作为错误率的容许上界,η<0.05表明双映射检验出现错误的可能性低于5%,属于小概率事件。
综上所述,针对复杂的映射关系是否双映射,可设计如下统计实验分析方法。
步骤1 选取变量可行域σ1,其补集即不可行域σ2。这里所说的可行域指的是定义域内满足任务要求的部分。
步骤2 在定义域σ内随机均匀选择nt个实验点,落在σ1内的实验点个数记为n1,落在σ2内的实验点个数记为n2。
步骤3 将所有nt个实验点映射到值域Σ,根据σ1内实验点映射到Σ上的分布,绘制这n1个实验点的包络,此即σ1映射后形成的区域Σ1,统计σ2内实验点映射后落在Σ1的数目nx,则η=nx/nt。
步骤4 若η>ε,分析停止,未通过可行性分析;否则,重新选取变量可行域,重复步骤1~步骤3,直到循环次数达到事先设定的上限。
特别说明,如果f:σ→Σ是不连续映射,那么σ1映射后形成的Σ1可能由多个不连通的区域组成。此外,如果维度大于3,则无法通过可视化方法看到定义域和值域。
2.2 可行性分析流程设计
为将2.1节提出的控制性能评价的可行性分析方法更好地与高超声速飞行器结合,需要针对高超声速飞行器的特点设计相应的分析流程。
考虑高超声速飞行器纵向平面内的二维运动,控制输入包括升降舵偏转角δe和燃油当量比φ,质心运动方程可表示为
(3)
式中:m为质心质量;v为速度;γ为轨迹角;h为高度;α为迎角;q为俯仰角速率;Iyy为转动惯量;T为推力;D为阻力;L为升力;M为俯仰力矩。
针对在平衡点处线性化得到的线性模型,设计全状态反馈控制器,实现高度、速度指令的良好跟踪。工程实际中迎角α和轨迹角γ的测量存在困难,但文献[22-23]已对α和γ的重构做出深入的研究,提出了可行的重构方法,因此本文研究中假设所有状态全部可测并可用于状态反馈。状态空间方程为

(4)

动态模型仅仅是系统的简化数学表示,因此不确定性的存在是不可避免的。本文主要讨论模型参数不确定性,它包括气动不确定性、状态测量的不确定性、惯性因素引起的不确定性以及大气密度的不确定性。考虑模型参数不确定性的线性系统状态空间方程可表示为
(5)
式中:u*为配平状态的输入。
根据式(5)可以推断,参数不确定性会直接影响控制输入,从而导致任务变量到底层评价指标的映射发生变动。在参数不确定性的摄动下,底层指标的评价结果会呈现一定的随机性,若底层指标对参数不确定性摄动过于敏感,则对应的评价方法不合适。为分析参数不确定性的影响,需要将映射关系按是否可解析分为2种情形:当映射关系存在解析形式时,可采用解析方法分析底层指标对于参数不确定性的敏感程度;当映射关系难以解析分析时,可采用2.1节提出的错误率检验,从数值的角度分析不确定性的干扰。
基于上述讨论,可以设计总体分析流程,如图2所示。整体流程分为2个阶段,第1阶段为初始化,根据高超声速飞行器的飞行任务需求,结合任务变量之间的耦合关系,将任务要求提炼出n个线性无关的任务变量,并给定对应的取值范围;设置控制律参数,以达到不同级别的任务要求;确定底层控制性能评价指标,选择用于可行性分析的n个底层指标;设置统计实验分析中容许的错误率上界以及循环次数。
流程的第2阶段为双映射检验,f为从任务变量线性空间Πn到底层评价指标线性空间Λn的映射。首先判断f是否存在确定的解析形式。如果存在显式解析表达式,那么无论是双映射关系还是不确定性扰动分析都可用解析方法确定。反之,如果映射关系很难写成解析形式,那么需要通过数值方法先建立任务变量空间到底层指标空间的映射f。具体方法是,调节控制律参数,进行飞行仿真实验,记录任务变量信息和底层评价指标信息,经过大量的飞行仿真实验,可构筑任务变量和底层指标的数值对应关系。在此基础上,即可采用2.1节提出的统计实验方法判断是否为双映射,以及映射对不确定性造成的参数扰动的敏感程度,依据η和ε的相对大小关系确定控制性能评价的底层指标是否可用于高超声速飞行器指定任务的评价。

图2 分析流程设计Fig.2 Flowchart of analysis
2.3 传统评价指标的可行性分析
本文选择高超声速飞行器的静稳定度和受扰后的升降舵总偏转角为任务变量,讨论阻尼频率特性能否作为静态性能评价的底层指标。
高超声速飞行器多数是静不稳定的,其开环飞行品质往往并不理想[15],可以考虑加入增稳系统作为控制器以满足任务要求。本节的任务变量,静稳定度SM和升降舵偏转角δe是线性无关的变量,为匹配任务变量,底层评价指标的维度应设置为2,选择阻尼频率特性中的短周期自然频率ωnsp和短周期阻尼比ξnsp作为底层评价指标。采用纵向比例式增稳系统,选取俯仰角速率q和迎角α作为反馈信息。小扰动情形下的升降舵面偏转满足:
dδe=-Kqdq-Kαdα
(6)
式中:Kq和Kα为反馈增益,即控制律参数。
高超声速飞行器本体的静稳定度和随迎角变化的俯仰力矩有关,俯仰力矩对迎角的偏导数为
(7)

结合式(6)和式(7),可得到加入控制器后的高超声速飞行器俯仰力矩对迎角的偏导数:
(8)
式中:下标“δ”表示对升降舵偏转角的偏导数;下标“aug”表示增稳系统。
根据静稳定度的定义,在忽略次要项的条件下,增稳后高超声速飞行器的静稳定度可近似写成
(9)
升降舵偏转角可分解为平衡点处配平舵偏和扰动情形下的舵面偏转,其表达式为
δe=δe, trim-Kqdq-Kαdα
(10)
式中:下标“trim”表示配平状态。
综合上述分析,控制律参数到任务变量的映射f′-1关系可表示为
(11)
在小扰动情形下,该映射为线性映射,进一步,若矩阵A′非奇异,则该映射为双映射,最终得到其逆映射f′为双映射。下面检验不确定性对控制律参数的扰动幅度。
考虑不确定性对映射f′的影响,记不确定性干扰下的系数矩阵为A′+ΔA′,任务变量为b,则不确定性对映射的影响可转化为线性方程组(A′+ΔA′)K=b-B′和A′K=b-B′-ΔB′解的差异性分析,即线性方程组解的扰动分析。通过计算线性方程组的条件数κ(A′),分析解的稳定性,即可了解不确定性对控制律参数的摄动。条件数的表达式为

(12)


(13)
给定容许的相对误差范围,可通过式(13)确定条件数κ(A′)的判定范围。
本节考虑的底层评价指标是闭环系统频域指标,其求取方法可以参考常规飞机飞行品质评价中的等效系统法[25]。等效系统法包括频域等效拟配和时域等效拟配。在指定的频段内,受同样的外界激励,若存在某确定形式的低阶系统(LOES)和原高阶系统(HOS)表现出近乎一致的频率响应特性,则此低阶系统是高阶系统的频域低阶等效系统。本文中底层指标的求解过程如下:首先,根据状态空间方程式(5)得到状态变量[α,q]T关于控制输入δe的闭环传递函数;然后采用频域等效拟配的方法可得底层指标[ωnsp,ξnsp]T。为了保持俯仰姿态和纵向轨迹之间的动态关系,采用俯仰角速率q和迎角α双拟配。为了保证等效阻尼频率特性的可行度,需要对等效拟配的结果进行验证,验证工作包括以下2点:
1) 失配度≤25代表拟配结果较好,失配度≤50代表拟配结果可接受[26]。
2) 高阶系统和低阶系统的幅值、相角差值都在失配包线[25]内。
由此可见,控制律参数到底层指标的映射ft比较复杂,ft的双映射检验应采用统计实验分析。
2.4 特定飞行任务评价的可行性分析
对于特定的高超声速飞行任务,如高度、速度指令跟踪,目前缺乏详细完整的控制性能评价方法。由于缺乏常规飞行器那样大量的飞行实验数据,考核指标的量化、融合还停留在探索阶段,并未形成规范。此外,高超声速飞行器具有速度快、飞行包线大的特点,不同飞行阶段对控制性能的要求也呈现较大差异。因此,现有的研究仅对飞行任务变量提出要求(例如执行打击任务的高超声速飞行器存在终端约束),并未规定底层评价指标的精确范围。本文以高度、速度指令跟踪为特定飞行任务,以传统时域性能评价指标为底层评价指标,展示评价的可行性分析流程。
本文控制系统的选择参考文献[27-28]给出的LQR控制器,其控制律的表达式为
Δu=u*-KxLxL-Krr
(14)


评价指标的维度应不小于任务变量的维度,而为了便于双映射分析,底层评价指标应尽可能选取统一的维度。从控制系统结构的角度来看,它是比例-积分控制架构,而从信息融合的角度来看,它包含飞行状态、跟踪误差以及轨迹的实时信息,应将系统响应的快速性、准确性、稳定性纳入考核指标。可选用的一组时域评价指标[εv,εh,εα,ess,v,ess,h,ess,α,ts,v,ts,h,ts,α]T,其中ε、ess、ts分别表示飞行器在工作点附近,对阶跃指令信号响应的超调量、稳态误差和收敛时间,下标v、h和α分别对应速度、高度和迎角。
任务变量到底层评价指标的映射f很难解析表示,只能采用统计实验分析的方法进行双映射检验。因为维数较高,无法应用可视化方法确定可行域和不可行域内的点,可采用以下方法:首先确定可行域中样本点映射到值域中的位置,在此基础上确定映射后的可行域顶点位置,依据顶点坐标拟合出近似的超平面,若不可行域内的实验点映射到值域中所有超平面向内的一侧,则统计该类型的实验点,且该类型点在全体实验点中的比率即错误率η。从上述步骤可以看出,随着数据维度提高,双映射检验分析底层指标可行性的效率显著下降。
3 仿真分析
军标MIL-F-8785C认为,对于飞行器本体或加入增稳系统的闭环系统,其静态性能应满足一定的阻尼频率特性要求。本节将对2.3节实例进行仿真,以检验阻尼频率特性是否可以作为高超声速飞行器闭环系统静态性能的评价指标。选择Bolender和Doman的高超声速飞行器模型[29]作为实验对象,设置巡航高度为25 908 m,马赫数为8。迎角、俯仰角速率扰动分别设置为Δα=0.026 18 rad、Δq=0.052 36 rad/s,允许的错误率上界为5%。限定控制律参数的取值范围Kα∈[-3.2,-0.8],Kq∈[-4,0]。不确定性因子对应的拉偏范围见表1,拉偏范围参考文献[30]。各不确定性因子在对应的拉偏范围内,以标称值为中心,随机生成服从正态分布的不确定性组合。
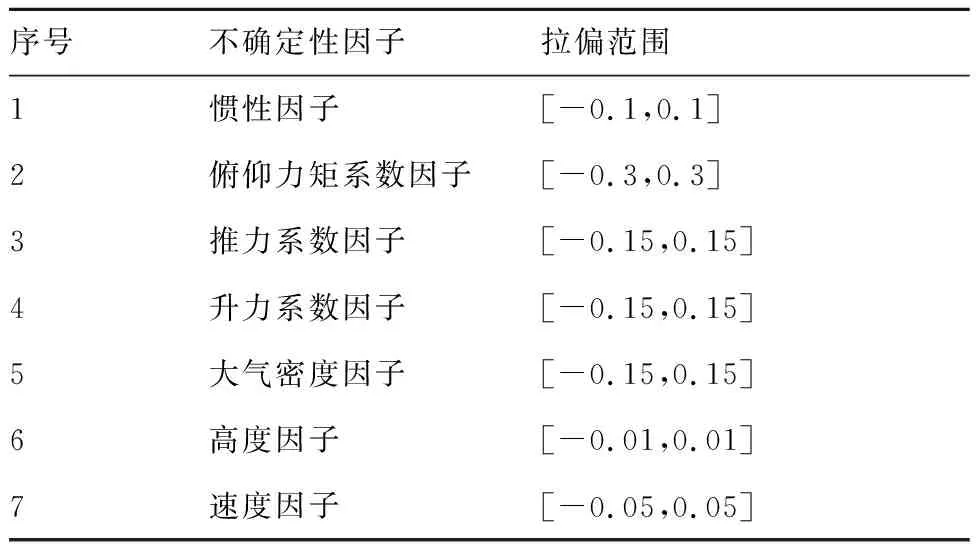
表1 不确定性因子拉偏范围Table 1 Perturbation range of uncertainty factor
首先分析从任务变量到控制律参数的映射f′,给定参数下映射f′中矩阵A′的标称值为

控制律参数到底层评价指标的映射f的检验需要基于数据分析,本文统计实验分析方法要求选取不同的任务变量可行域进行多次重复实验,这里列举其中4次任务变量要求,如表2所示。
每次实验在任务变量取值域内随机均匀选取500个实验点,经过f′映射后,在控制律参数线性空间Ω内实验点的包络形成控制律参数的定义域,满足任务变量要求的实验点的包络形成可行域,其补集即不可行域。控制律参数定义域内的实验点都对应于一个闭环系统,经过频域等效拟配,可得到对应的等效阻尼频率特性。而在进行统计实验分析之前,需要先验证等效拟配的合理性。仿真结果显示,低阶等效系统和原系统具有相近的频率响应特性。选取第一轮循环的一组反馈增益Kα=-2,Kq=-1.5为例,频率响应对比如图3所示,失配包线检验如图4所示。
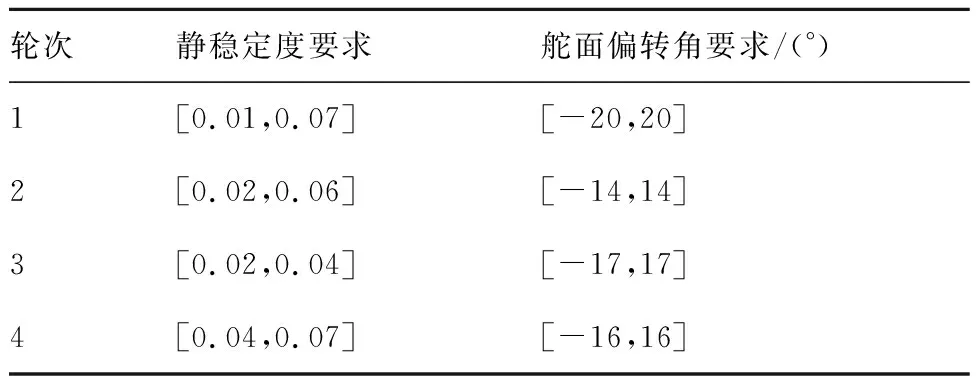
表2 重复实验的任务变量要求
等效拟配的合理性确保对映射ft进行统计实验分析的可执行性。控制律参数定义域内实验点的分布如图5所示,可行域σ1内的点用圆圈表示,不可行域σ2内的点用叉表示。这里的可行域指的是满足任务要求的控制律参数的取值域,不可行域指的是控制律参数定义域内可行域的补集。本文忽略执行器的执行能力,仅讨论控制系统是否在理论上具有实现任务要求的可能性。通过对具有不确定性的参数按表1的要求进行拉偏,获得控制律参数映射到底层指标线性空间的实验点分布,如图6所示。绘制可行域σ1映射后形成的区域Σ1,并统计实验点的分布如表3所示。结合图6和表3可以看出,每轮分析结果均显示错误率η<0.05,这表明从控制律参数到底层评价指标的映射ft近似为双映射,且底层指标对参数不确定性的摄动不敏感。

图3 高阶系统和低阶等效系统频率响应对比Fig.3 Comparison of frequency response between HOS and LOES


图4 频域等效拟配的失配包线验证Fig.4 Mismatched envelope verification in frequency domain equivalent matching

图5 控制律参数取值域内实验点分布Fig.5 Experimental points in control law parameter domain
综合上述仿真结果,对于实例中给出的任务要求,采用阻尼频率特性作为底层指标评价高超声速飞行器静态闭环性能是可行的,这与军标MIL-F-8785C中关于常规飞行器的观点一致。

图6 实验点在底层指标取值域内的分布Fig.6 Experimental points in underlying indicator domain

表3 实验点分布统计Table 3 Statistical of exprimental points
4 结 论
本文研究了控制性能评价方法的底层指标在高超声速飞行任务评价方面是否具有可行性这一问题。将可行性分析问题转化为特定映射的双映射检验问题,提出了一种统计实验分析方法,并进一步设计了可行性分析流程。按照设计的流程分析了高超声速飞行实例,并设计仿真实验进行验证。仿真结果表明:
1) 关于采用阻尼频率特性作为指定飞行任务的底层评价指标时,本文的分析结果和军标MIL-F-8785C观点一致。
2) 本文提出的利用统计实验方法分析映射关系具有较好的通用性。
3) 本文提出的可行性分析流程具有良好的可实现性。
