基于系统聚类的雷达工作模式识别方法及仿真
2020-04-13林龙,吴碧
林 龙,吴 碧
(中国人民解放军91388部队,广东湛江 524022)
电子侦察是现代电子战争的关键部分,而雷达的工作模式识别是电子侦察的重要功能。通过雷达侦察技术掌握敌方雷达的信号参数,依据雷达波形的设计原理对敌方雷达的功能加以推断,判断当前敌方雷达的工作模式和威胁程度,为对敌技术打击和硬摧毁提供重要技术支持,在实际战场环境中起到关键性的作用[1]。
在不同工作模式下,不同平台的雷达所表现出的信号特征具有多样性,而且不同型号雷达之间存在交集。目前使用的雷达工作模式识别技术大部分存在识别效率低,更新模型工作量大等不足。传统基于雷达数据库的雷达工作模式识别方法对数据库的要求较高,它需要大量可靠的经验知识,且识别所需的时间较长[2]。文献[3]通过分析影响相控阵雷达工作模式的不同特征参数, 选择合适的相控阵雷达脉冲描述字中的特征参数或特征参数组, 通过模糊聚类方法,来实现工作模式的识别,但该方法运算量大,收敛慢,实战中不利于快速判断。文献[4]通过相参脉冲间隔(Coherent Pulse Interval,CPI)特征矩阵,并对其进行关联来识别雷达工作模式,但只对CPI特征矩阵关联进行识别存在一定模糊性, 如对速度搜索(Velocity Search,VS)搜索模式使用的高重频(High Pulse Repetition Frequency,HPRF)波形与单目标跟踪模式下使用的单组脉冲重复间隔波形就难以识别出工作模式。文献[5]通过判别敌方机载雷达的扫描包络进行工作模式识别,但它仅能对工作状态进行判断,无法识别搜索跟踪波形。文献[6]仅能实现机载相控阵雷达工作模式的功能级仿真识别,并没有对信号级仿真进行研究。文献[7] 只能对四种典型的雷达空空工作模式进行识别,对更复杂的工作模式的判断能力不足。文献[4-7]都仅适用于机载雷达,对其他平台雷达未做考虑。
本文首先分析和总结了雷达搜索和跟踪的特点。结合截获信号的幅度分布特点,利用幅度分布函数、系统聚类[8-10]、K-S(Kolmogorov-Smirnov)检验[11-12]等方法对雷达的搜索与跟踪波形进行识别,实验证明了本方法的有效性。该方法适用于多雷达平台,映射匹配更为快捷准确。
1 信号分类方法
典型的雷达侦察系统所获取的是直接来自于雷达的发射脉冲信号的极化及调制信息,这些参数一般组合到一起,成为脉冲描述字(PDW)。由于环境的复杂性,雷达侦察系统所获取的信息通常为是较长的数据串,同时数据“辐射源”可能较多,信号复杂。为有效提取所需信号,这里先采用系统聚类法对数据进行初步的分类。
作为聚类分析中应用最为广泛的一种方法,系统聚类法的基本原理可简单理解为:首先,将一定数量的样本各自看成一类,然后,根据样本的相似程度,将相似程度最高的两类进行合并,然后,考虑合并后的类与其他类之间的相似程度,再进行合并。重复这一过程,直至将所有的样本合并为一类[13]。这里使用的是欧氏距离。其定义为:假设有两个n维样本x1=(x11,x12,…x1n)和x2=(x21,x22,…x2n),则它们的欧氏距离为

(1)
结合侦察场景数据,聚类分析具体的操作步骤如下:
1)选择某一工作模式下的波束扫描时间内变化较小的参数作为聚类分析的特征量(如载频、脉宽、带宽等)。
2)根据每个样本的特征量所组成的欧氏距离,选择合理的门限,对场景数据进行初步聚类。
3)初步聚类完成后,把聚类后的信号根据脉冲到达时间(TOA)的间隔大小再次进行分割,分割后的信号作为单个信号组。
4)把分割好的信号组按照幅度变化情况进行合并,将在连续时间内的幅度变化不大的信号组合并到一起。在发射信号时,由于抗干扰或者解模糊的需要,会发射组间频率捷变或者组间重频参差信号,把这些相关的信号组归纳到一起有利于观察信号的幅度、脉冲重复周期(Pluse Repetition Time,PRT)及载频的变化情况,能够更好地确定雷达信号对应的雷达功能。
从原始数据中是无法直接获取PRT这一参数的,但原始数据中会有TOA参数。只要把信号合理分组,在每一组信号内的相邻信号的TOA之差即可作为一个PRT,而且,可用PRT验证信号组合前的信号分类是否正确。
2 雷达波形识别
搜索和跟踪是雷达基本功能,针对不同的应用场景、不同的体制雷达,搜索与跟踪所采用的雷达波形参数可能范围存在较大的重叠区域,对于多功能雷达尤为明显,因此,通常上述功能仅从雷达参数上是无法识别的。本文将结合雷达的资源调度特点完成所侦察对象的搜索与跟踪功能识别分类。
2.1 雷达基本波形分类
雷达基本波形根据重复频率可以分为低重频(Low Pulse Repetition Frequency,LPRF)波形、中重频(Medium Pulse Repetition Frequency,MPRF)波形和HPRF波形;根据功能模式可以分为中重频边搜索边测距(Medium Range While Search,MRWS)模式和高重频边搜索边测距(High Range While Search,HRWS)模式。常见雷达的基本波形[12]如下:预警LPRF、预警MRWS、预警HRWS、预警VS、火控搜索LPRF、火控搜索MRWS(参差)、火控搜索HRWS(线性调频)、火控跟踪MPRF、火控跟踪HPRF或VS、火控搜索HPRF(参差)[14]。
区分基本波形的依据是其对应的平台及工作模式。一般情况下,基本波形都有对应的参数设置范围。从截获的雷达信息可以一定程度上判断出其所属的基本波形种类,如机载火控HPRF波形与机载多功能速度搜索波形的参数值就很接近,故很难从截获的波形参数值上判断波形类别,特别是对跟踪及搜索状态的判断。
2.2 雷达波形幅度特性
作为实际应用中常用的两种工作模式,搜索与跟踪在波形参数设计时通常会使用有一定区别的系统参数。从资源调度的角度出发,两者还有一个重要区别为:数据率的不同[4]。通常情况下,数据率指单位时间内回波对某波位的重访次数或者某波位的重访时间间隔。为了方便推导,本文对数据率进行扩展定义。下面首先给出数据率的广义定义:一定时间频率内数据出现的频率,这里称之为广义数据率,如不加以说明,后文提到的均为广义数据率[15]。
从雷达侦察的角度对搜索、跟踪功能下的截取回波特点进行分析,主要特点可总结为:
1)搜索:由于目标位置的未知,雷达波束扫描范围较大,侦察雷达所截获的波形幅度变化范围较大。同时其幅值分布满足正态分布,通常采用单样本K-S检验来检测。
2)跟踪:特定目标位置已知,雷达波束扫描集中于小范围或者特定目标的锁定,而非大范围的扫描,因此侦察雷达所截获的雷达波形幅值会集中于小范围内,甚至某几个点的幅值(点的个数与跟踪目标的个数相关)。
2.3 K-S检验
单样本的K-S检验是用来检验一个数据的观测经验分布是否是已知的理论分布[16]。检验方法为:以样本数据的累计频数分布与特定理论分布比较,若两者间的差距很小,则推论该样本取自某特定分布族[17]。
首先,假设检验问题为:H0:样本所来自的总体分布服从某特定一维连续分布F;H1:样本所来自的总体分布不服从某特定一维连续分布F,F为理论分布的分布函数[18]。
构造检验统计量

(2)
H0为真,则Z分布收敛于Kolmogorov分布,即当样本取自一维连续分布F时,

(3)
注:当F为连续分布时,随机变量K的分布不依赖于F。
2.4 雷达波形识别流程
在判断雷达搜索跟踪波形时,先计算出每个幅度的平均频率,然后判断场景中包含的基本波形是否只有一种。若该场景中只有一种基本波形,波形识别流程如图1所示;若该场景中包含多种基本波形,波形识别流程如图2所示。

图1 单一基本波形识别流程
3 仿真验证
假设仿真场景中,雷达处于搜索加跟踪状态,且由于反侦察、增大作用距离等需要,在发射的时候会采用参差重频、频率捷变等技术。在参数选择上,PRT为:7、9、10、11、12、13、14、15、17(单位:us);载频捷变采用载频为:9.49、9.53、9.55、9.61、9.64、9.66、9.68、9.70、9.74(单位:GHz)。
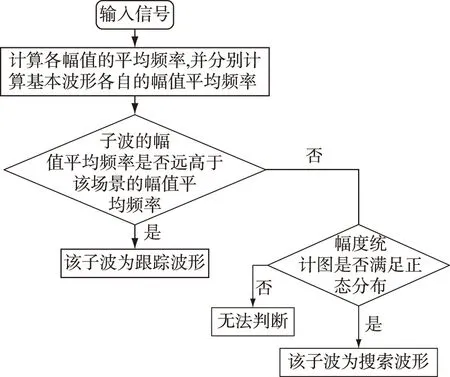
图2 多种基本波形识别流程
3.1 信号分类验证仿真
对信号组进行随机抽取,观察分类后的信号组的幅度、PRT、载频的变化情况,如图3所示。从图3可以看出,在某一组信号内幅度基本不变,PRT与载频都有参差。图中仿真结果验证了基于聚类的信号分类方法的合理性。
3.2 基本波形识别仿真
对3.1中已分类的雷达波形做初步的信号仿真,进行参数识别。对于分类后的每组信号我们称为子波,根据该子波的参数特性,我们对其进行初步划分判断,其依据主要是常见雷达子波功能的参数范围,如载频、PRT等。

图3 分类后的若干信号组的参数变化情况

图4 子波序号识别结果
仿真中场景的子波识别结果如图4所示,子波序号在9号和10号两个基本波形中,其中大部分子波属于9号波形。根据前文基本波形分类,有必要对两个波形进行验证,而且对于9号波形而言,还需要对其究竟是搜索还是跟踪状态进行进一步判定。
3.3 搜索跟踪波形识别判断仿真
对于雷达搜索与跟踪波形的判断,本文主要结合波形幅度统计分布及相应的概率分布进行仿真判断。首先对9、10号子波的幅度进行统计分析如图5、6。

图5 9号波形幅度统计图
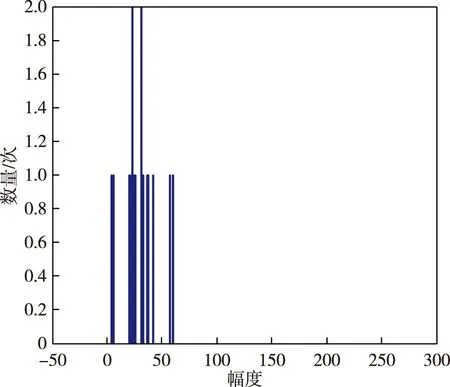
图6 10号波形幅度统计图
对图5和图6进行分析,两种波形的幅度统计结果如表1所示。

表1 幅度统计结果
然后,根据两种波形的幅度统计,计算它们的正态分布概率,如图7、图8所示。

图7 9号波形正态分布概率图

图8 10号波形正态分布概率图
从图7可以看出,9号波形的幅度并不符合正态分布,为跟踪波形;从图8可以看出,10号波形的幅度更符合正态分布,为搜索波形。
根据上述判断结果,通过幅度统计分布及概率分布双重标准的方式,可推导出9号波形处于单目标跟踪状态,10号波形处于搜索状态,即雷达处于搜索加跟踪的工作状态,识别结果正确。
4 结束语
本文根据雷达信号的功能特点,首先利用了系统聚类法等数学工具,结合实际情况,如时序的连续性、参数的变化情况等因素对雷达信号进行了有效分类,特别是通过分析雷达在不同功能下的波形幅度分布情况,结合K-S检验方法对雷达信号分类后的子波进行功能识别判断,给出了雷达工作模式识别的详细流程。仿真实验证明了该方法的正确性,在雷达侦察领域具备良好的应用价值。