基于假设检验思想的雷艇信息关联技术
2020-04-13丁迎迎
丁迎迎
(江苏自动化研究所,江苏 连云港 222061)
鱼雷是当今水下战场的主战武器,其突出特点是具备水下声自导系统,为鱼雷发现、识别直至攻击目标提供最主要的信息来源和动作指令。目标舰艇为了应对鱼雷的袭击,采用各种对抗手段干扰鱼雷声自导系统工作,使得鱼雷反对抗面临着严峻的考验。
为提高态势感知能力和鱼雷的反对抗能力,利用鱼雷发射艇上的声呐探测信息[1],并结合线导鱼雷作为前出传感器获取的近距离目标探测信息,进行有效的雷艇信息融合,成为军事领域技术研究的一个关键课题[2-3]。
1 雷艇信息融合研究现状
现代鱼雷已经不同程度地具备真假目标识别能力,可以对抗声诱饵等假目标,但是单一依靠鱼雷上有限的方法实现目标识别以及多目标分辨,具有较高的难度。随着鱼雷线导系统的进一步发展,特别是光纤技术的利用为利用鱼雷自导信息、艇上传感器信息以及指挥员的先验知识,实现信息融合提供了可能。
早期线导鱼雷的线导系统多为铜线,传输能力有限,线导鱼雷通常只将遥测数据传回发射艇,便于发射艇对作战态势进行掌握。随着光纤线导系统的问世,信息传输能力大幅提高,鱼雷的原始探测信息如自导头探测数据有望回传到发射艇,从而可使发射艇进行更高性能的信号处理以及真假识别处理,提高鱼雷的抗干扰能力。
目前国外主流的几型重型鱼雷中都不同程度地利用了雷艇信息融合技术,以实现武器探测平台信息与发射平台信息的一体化。比较典型的是意大利“黑鲨”重型鱼雷[4],其采用ASTRA自导头,可在远距离内同时跟踪多达10个目标并具有水声对抗能力,利用光纤线导可将探测的高速数据从鱼雷传向发射平台,用于和平台声呐系统探测的目标进行信息相关处理。
德国DM2A4重型鱼雷采用意大利TOSO自导头,提供了高质量的声呐数据反馈能力, 作战系统利用这些数据可为操作员提供有价值的信息,从而使得真实目标和干扰器能够被辨别。
美国CBASS鱼雷项目用于开发一个新型的宽带声呐系统及其相关软件,包括新型宽带处理算法,以期提高MK48 ADCAP重型鱼雷的反对抗性能和浅水检测性能。美国和澳大利亚联合研制的MK48-7采用CBASS后自导作用距离增加到3 km以上,遥测数据返回潜艇。
瑞典TP62鱼雷的出口型为TP2000型重型鱼雷[5],其线导导线改进为光导纤维后,使瑞典成为率先在鱼雷上实现光纤线导的国家,其线导系统可双向传输80种信息。
2 雷艇信息关联技术
本文主要探讨雷艇信息融合中的关联技术,即雷艇探测多目标的数据关联技术。主要任务为将鱼雷回传探测目标数据和潜艇对目标的探测数据进行关联,以便对来自同一目标的两平台探测数据进行融合。
雷艇信息关联技术属于多平台信息关联的范畴,但是和一般的多平台关联有一定的差别:首先潜艇和鱼雷对目标的探测距离相差悬殊,探测精度差别较大,探测周期亦有差别,由于潜艇对线导鱼雷的导引特点,形成的雷、艇、目标的相对态势亦不同于常规的两平台关联问题。
本文基于假设检验思想进行雷艇信息关联处理,首先产生当前时刻量测的所有可能组合,然后根据空间约束和各种可用信息剔除不可能组合,再利用时间域上的约束剔除不可能组合,从而大大减少关联假设数目以降低计算量,最后,对剩余组合进行状态滤波并计算判决量,满足判决要求的组合为正确关联组合,最终实现雷艇探测多目标的有效关联处理。
2.1 问题描述

给出问题的约束条件为1)每一个量测仅来源于一个目标,任一量测不来源于目标必然来源于杂波或虚警;2)对于一个给定的目标,最多只有两个平台的观测以其为来源。
2.2 关联假设产生
考虑到本文主要进行雷艇两平台目标的关联处理,且由于探测能力的制约,雷艇两平台共同探测目标的数量有限,因此,对每个时刻测量信息可以穷举产生所有可能的关联组合。
由于目标在时间域上的运动信息可以辅助排除一些不可能组合,因此,对各个时刻的可能组合,再在时间轴上进行组合产生所有可能的关联假设[6-7]。通常,随着时间的推移,真实目标的关联可能性较高,而对于一些虚假目标,其关联可能性将越来越小直至被剔除,而真正的目标将被保留下来。
图1中给出雷艇两平台探测两个目标时的时间域关联假设产生结果。
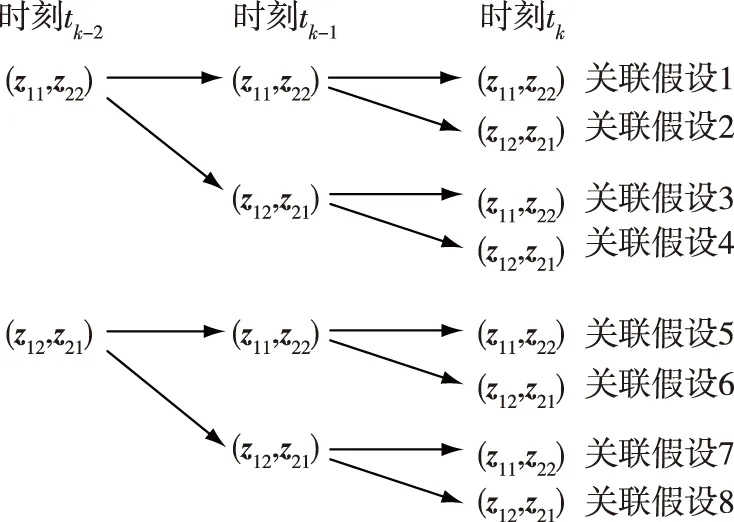
图1 时间域关联假设产生
2.3 关联假设约减
在上述关联假设产生过程,每个周期都会产生多个假设,再经过时间域上的组合,关联假设的数目将会非常多,如果不进行约减,随着时间的推移,将会出现组合爆炸的现象。因此,必须利用所有可用信息进行关联假设的约减。
对当前时刻量测形成的关联假设,可以通过目标的空间分布特性进行约减,主要通过以下特征进行判断:
1)保证两个平台对同一目标的方位有交点且交点位于可能探测范围。由于潜艇与线导鱼雷的探测距离和探测扇面差别较大,通过判断交点是否位于探测距离或可能探测范围之内以完成筛选。
2)保证两个平台对同一目标的特征具有足够的相似性。由于现代先进线导鱼雷大多能将探测信息回传至发射潜艇,因此,可以比较潜艇和鱼雷两个平台探测目标特征是否具有足够的相似性。
对时间域形成的关联假设,可以通过目标的运动特性进行约减,主要通过以下特征进行判断:
1)目标速度、加速度。通常目标的运动参数往往满足一定的规律,如其速度、加速度一般在特定范围内取值。可以利用不同类型目标的速度、加速度分布进行判断,考虑误差影响后,如果假设中目标的速度、加速度差异较大则该关联假设应被排除。
2)目标航向。通常滤波模型都有一定的目标运动假定,如匀直、转向、圆弧运动等,如果关联假设中的目标航向与运动假定有较大变化,则该关联假设应被排除。
3)关联波门。通常系统会对上一时刻保留下来的可能目标进行跟踪预测,并确定关联波门,则在当前扫描周期可利用关联波门对关联假设进行排除。
通过上述方法对关联假设进行约减,可以剔除明显虚假的假设,缓解假设数目呈组合爆炸式增长的现象。同时,也可以作为关联结果的检验策略,进一步确认关联的准确性。
2.4 雷艇信息关联
对于约减后的关联假设,如何从中找到正确的关联假设是问题的关键。本文通过对关联假设中的目标运动参数进行估计,然后构造判决量作为假设评判依据进行关联假设判决,满足判决要求的关联组合即为雷艇信息关联结果。
pi,j(θ)=

(1)
设I为到当前时刻为止时间域上所有可能的关联假设集,其中的任一关联假设J∈I中的所有目标状态向量的全概率分布函数为

(2)
根据极大似然原理,m个目标的状态参数构成的多维向量θ的估计由下式给出:

(3)
式(3)求解可采用线性最小二乘法、非线性最小二乘法等。本文对每个可能假设,先求解目标运动要素,再计算判决量以确定最可行的关联假设即作为当前时刻关联结果。
3 仿真验证
为了考察本文所提算法的性能,下面进行仿真验证。假定潜艇和鱼雷以被动方式探测目标,目标为三艘匀速直航的水面舰船,没有实施对抗行为。
以鱼雷发射时位置为坐标系原点进行仿真,仿真的潜艇、线导鱼雷、目标的相对运动态势如图2所示。
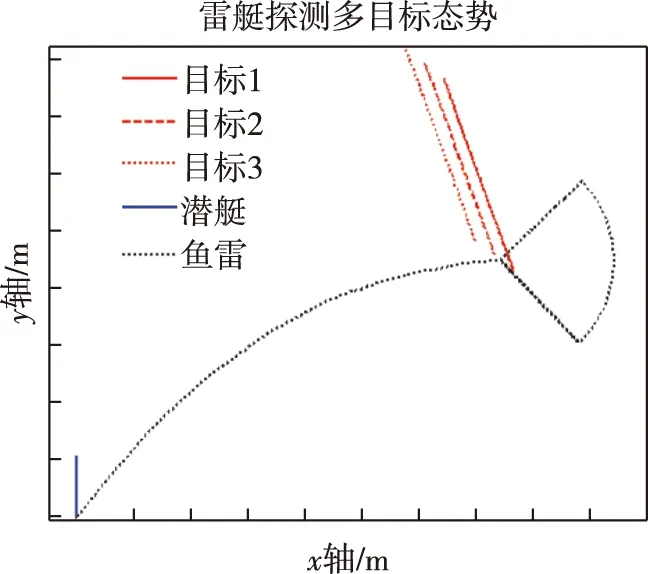
图2 仿真态势
在不考虑传感器漏检进行一次仿真得到的雷艇多目标关联结果如图3a)所示,定位结果如图3b)所示。50次蒙特卡罗仿真得到的雷艇多目标关联正确率如图4所示。

图4 雷艇多目标关联正确率
从图3结果可以看出,鱼雷陆续探测的三个目标均能和潜艇目标实现正确关联,得到的目标定位结果和真实轨迹逐渐接近。从图4结果可以看出,多次统计得到的关联正确率随着鱼雷对目标探测数据累积逐渐上升,达到90%以上,在整个有效探测时间内的关联正确率平均值达到了86%,可见本文所提算法具有较好的关联效果。
4 结束语
本文针对线导鱼雷与潜艇发射平台的雷艇信息融合问题进行了探讨,着重分析国外技术研究现状,对雷艇探测多目标关联问题进行了深入研究,提出了基于假设检验思想的雷艇多目标关联算法,算法充分利用雷艇探测目标的空间分布特性、时间运动特性对关联假设进行有效剔除,较好地克服了关联过程中的NP难题,仿真结果表明了算法的关联有效性,本文工作可为雷艇信息融合问题研究提供有益的探讨。