基于α-β-γ-δ滤波的红外跟踪系统目标跟踪控制方法
2020-04-13陈家鲤
陈家鲤
(中国人民解放军32159部队,新疆乌鲁木齐 830011)
随着世界军事体系由机械化向信息化转变,信息化作战理念逐渐深入人心,精确制导武器、无人作战系统等智能化武器装备迅速发展。针对空中来袭的低、小、慢目标例如武装直升机、定向能武器、无人机等作战平台越来越大的威胁,光电探测系统的作用越来越重要,其中以红外跟踪系统最为典型[1]。
红外跟踪系统是一种使用红外热像仪作为光电探测元件,使用位置、速度传感器等通过精密伺服控制保持平台指向和成像稳定的光、机、电系统,它能对探测范围内的来袭空中目标进行搜索、识别和跟踪。图1是一种地面红外跟踪系统。
光电成像、图像处理和伺服控制响应等因素都会影响红外跟踪系统跟踪运动目标的实时性,降低跟踪精度。目前用于运动目标跟踪的有数据融合[2]、检测前跟踪技术[3]等,其中以滤波方法为主[4-5],如维纳滤波、卡尔曼滤波、H∞滤波、α-β-γ滤波等。维纳滤波性能最佳,但需要大量的数据信息。卡尔曼滤波可以进行递推,可用于嵌入式控制器,但运算量较大,对系统控制器的运算能力提出了较高要求[6]。α-β-γ滤波是针对匀加速运动模型的卡尔曼滤波的简化方法,能够对加速度进行预测和滤波,但对于复杂运动目标跟踪精度不高。有必要设计一种运算量小、效果好、可行性高、适用于嵌入式控制器的目标跟踪算法。
本文围绕红外跟踪系统目标跟踪伺服闭环回路,在α-β-γ滤波的基础上设计了α-β-γ-δ预测滤波器用于脱靶量的预测和校正,通过使用高阶滤波因子,对运动目标的实时位置进行精确估计,以提高对运动目标的跟踪精度,克服了α-β-γ滤波只适用于匀加速运动目标的缺点,运算量少,速度较快,并在Matlab Simulink中进行了仿真,通过算法实现依托实物进行了室内和外场两种环境下的运动目标跟踪试验。仿真及试验结果证明该方法可以根据历史点迹预测运动目标位置,补偿相位滞后。
1 目标跟踪伺服控制结构
红外跟踪系统是一种精密伺服系统,采用全闭环反馈控制。控制系统由稳像跟踪控制回路、位置控制回路、速度控制回路嵌套组成,如图2所示。

图2 红外跟踪系统伺服控制回路框图
该系统使用红外热像仪作为图像传感器。在识别目标并进入跟踪后,目标图像与视场中心在方位和俯仰方向上的位置偏差作为跟踪指令输入跟踪控制器,解算出的位置指令输入位置控制器,产生的速度指令输入速度控制器,并通过惯性陀螺和位置编码器产生惯性速度和位置反馈信号,实现闭环控制。
测试平台采用制冷型中波红外热像仪作为光电探测器,伺服控制在ARM嵌入式平台上实现。图像处理卡的图像采集和处理频率均为60 Hz。热像仪图像如图3所示。
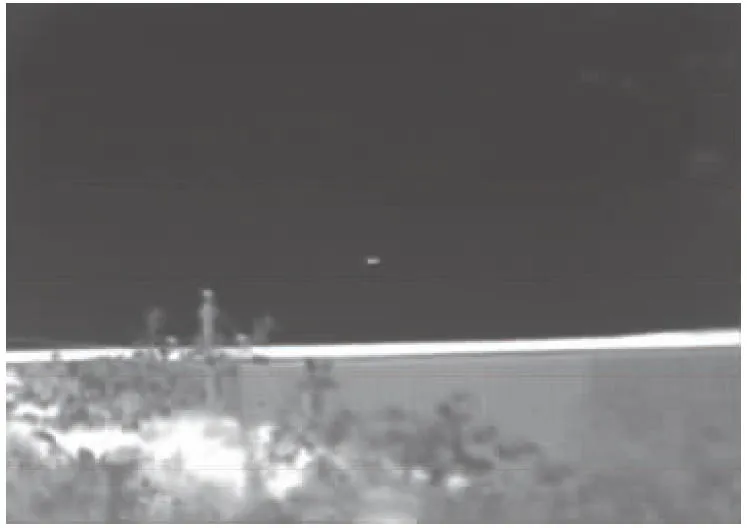
图3 红外热像仪图像
2 红外跟踪脱靶量误差分析
在视频图像目标探测中,目标位置信息通常用脱靶量表示。脱靶量是一帧图像中目标相对视轴中心的方位角偏差和俯仰角偏差,如图4所示。
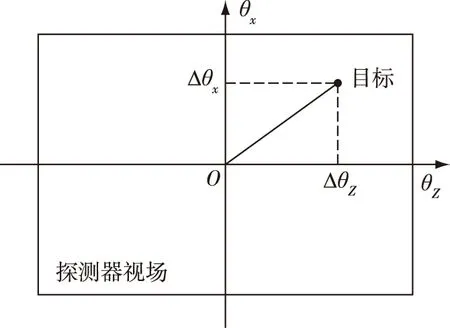
图4 脱靶量示意图
其中,Δθz为方位角脱靶量,Δθx为俯仰角脱靶量。脱靶量是在红外目标进入探测器视场后,图像处理卡检测产生的跟踪误差信号。一方面,由于探测成像、图像采集、目标检测等过程都会耗时,且图像处理频率只有60 Hz,目标脱靶量相比于目标的实际位置存在滞后,实时性不足。如若跟踪运动目标,会使跟踪滞后于目标的实时位置,产生拖尾,甚至因目标脱离探测视场而丢失目标;另一方面,图像处理等过程会引入各种噪声,从而影响脱靶量的精度,进而降低静态和动态目标的跟踪精度。这两个方面都会显著抑制系统的目标跟踪性能。所以,有必要设计一种计算简单、性能良好的目标位置预测和滤波方法,抑制以上两种因素的不利影响,提高跟踪精度。
对于静止目标,脱靶量噪声会影响跟踪稳定性;对于运动目标,脱靶量时滞会使跟踪滞后,降低跟踪精度,甚至会使目标脱离热像仪视场,导致目标丢失。要抑制脱靶量时滞和噪声对目标跟踪性能的影响,必须采用一种精度高的脱靶量处理方法;同时为避免处理过程中引入新的时滞,该方法还应尽量简单,减少计算时间。
3 α-β-γ-δ预测滤波原理
针对脱靶量噪声与滞后对目标跟踪的影响, 作者设计了 α- β- γ-δ预测滤波器[7]用于目标跟踪回路,其主要思想是根据物体运动的时间连续性,基于运动学原理建立观测方程,利用历史观测值和最新观测值补偿滞后、过滤噪声,估计当前目标的实际位置。具体而言,是通过对目标与视场中心偏差,即脱靶量变化的加速度、速度等趋势分量进行滤波和预测,估计跟踪残差,再使用整定后的滤波参数估计当前脱靶量、预测下个周期采样位置,不断迭代减小目标位置估计误差,提高跟踪精度。
3.1 脱靶量的变化特性分析
上文提到,脱靶量是热像仪视场中目标成像位置和视场中心的角度差。 将热像仪的指向角度使用泰勒级数进行展开:

(1)
式中:x为探测器视轴指向角度;T为采样周期。
伺服控制频率为1 000 Hz,
(2)
将目标成像位置同样进行泰勒级数展开。 由于探测器成像频率为60 Hz,位置采样周期为成像频率的倒数。略去三阶 以上的高阶分量可得:

(3)
式(2)-式(3),则脱靶量为:

(4)
3.2 预测滤波递推公式
根据式(1)(2)(3)(4),α-β-γ-δ预测滤波的递推公式为

(5)
(6)

(7)

(8)

(9)

用矩阵形式表示为
(10)

(11)
α-β-γ -δ预测滤波的原理思想同常规卡尔曼滤波算法类似,但卡尔曼滤波对嵌入式控制器运算能力有较高要求,每次迭代步骤都要更新大量相关滤波参数[8],是参数时变的,而α-β-γ-δ 预测滤波的参数一经整定后就不宰改变。相比于卡尔曼滤波[9],其优点是计算格式简单,计算量和需要的存储空间大幅减少,更有利于在实时伺服控制器中实现。加入α-β-γ-δ预测滤波后的目标跟踪原理框图如图5所示。

图5 基于α-β-γ-δ预测滤波的目标跟踪原理框图
4 预测滤波仿真及试验
为了验证α-β-γ-δ预测滤波在目标跟踪中的有效性,首先建立数学模型进行了仿真,然后在嵌入式控制器中编程实现,在实际系统中通过试验进行了验证。
4.1 仿真验证
在MATLAB Simulink中搭建了目标跟踪仿真平台,如图6所示。仿真验证时,首先建立目标跟踪闭环回路的数学模型,然后通过比较采用预测滤波前后目标跟踪相位滞后的角度,验证α-β-γ-δ预测滤波抑制脱靶量滞后对目标跟踪的影响,再通过输入给定的目标移动轨迹,在加入量测噪声的情况下对方位、俯仰两轴同时仿真,比较对目标轨迹的跟踪精度。

图6 α-β-γ-δ预测滤波目标跟踪仿真框图
其中,abfilter1为α-β-γ-δ预测滤波模块,用S-Function模块编写,电机模型采用直流伺服电机的电压-位置离散模型。该模型中,速度和位置控制回路的采样频率为1 kHz,跟踪控制回路与实际相同,为60 Hz。由于位置内环和跟踪外环的采样频率不同,为保持输入连续,插入了保持器模块,在两个控制回路间进行位置插值。
1)跟踪相位对比
分别设置延时模块为z-1、z-2、z-3,对应脱靶量滞后量分别为1、2、3个周期时,计算并比较预测滤波处理前后位置跟踪曲线与目标位置的相位差。如表1所示,原值跟踪的相位差分别为0.2089、0.2214、0.2226、0.2237,使用预测滤波跟踪后,相位差减小为0.1150、0.1164、0.1180、0.1198,说明预测滤波处理对跟踪相位滞后具有显著的抑制能力。
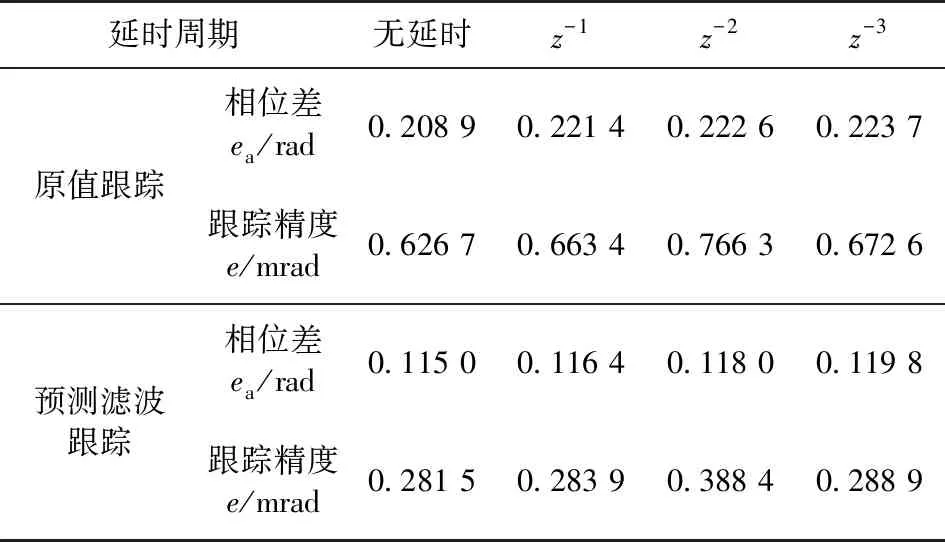
表1 位置跟踪相位差仿真
2)跟踪轨迹对比
为比较预测滤波跟踪效果,在方位、俯仰两轴上,预先生成目标的运动轨迹,作为跟踪闭环模型的输入,并加入白噪声作为量测噪声,同时对方位和俯仰两个方向的位置跟踪情况进行仿真,比较预测滤波跟踪和原值跟踪的跟踪轨迹和跟踪精度。
预先生成的目标轨迹如图7所示,仿真时间为10 s。
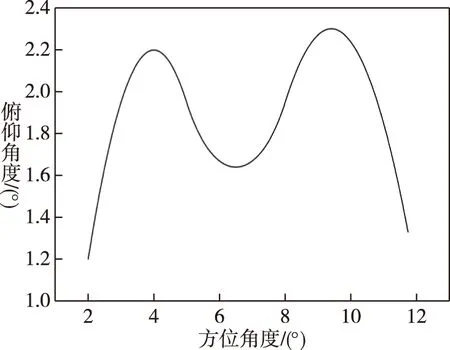
图7 输入目标轨迹
在生成目标位置点迹后,使用Simulink的From Workspace模块,分别将目标的方位和俯仰位置输入两个闭环跟踪模型中,在同一个时间量度内进行预测滤波跟踪和原值跟踪的联合仿真,分别记录跟踪轨迹和跟踪误差。两种跟踪方法的跟踪轨迹如图8所示。

图8 目标跟踪轨迹对比
跟踪误差随时间的变化情况如图9所示。
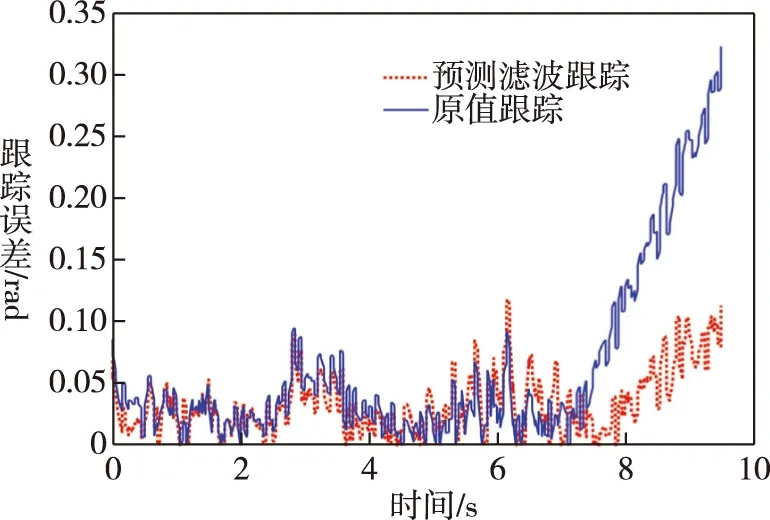
图9 跟踪误差曲线对比
根据图9,预测滤波跟踪的跟踪轨迹比原值跟踪轨迹更接近目标实际运动轨迹。以跟踪均方根误差作为跟踪精度评估指标来看,使用原值跟踪时,跟踪精度为1.4564 mrad,使用预测滤波跟踪时,跟踪精度为0.7183 mrad,预测滤波跟踪的跟踪精度优于原值跟踪精度。在此基础上,在随机的量测噪声条件下,进行多次仿真,并计算每次跟踪的跟踪精度,100次跟踪仿真结果如图10所示。

图10 跟踪精度曲线
从跟踪精度的对比可见,α-β-γ-δ预测滤波可以明显抑制噪声对目标跟踪的影响,提升跟踪精度,以上仿真结果证明了这一点。
4.2 试验验证
在仿真验证后,通过在嵌入式控制器中编程实现α-β-γ-δ预测滤波算法,围绕试验平台分别在室内和外场进行了靶标跟踪试验和外场飞机跟踪试验。
国军标 GJB-3147-1998《红外跟踪测量系统通用规范》给出了在室内使用旋转靶标测量跟踪精度的方法。旋转靶标半径为1米,末端固定LED灯泡作为热源目标。在靶标静止时控制系统平台先对其进行跟踪锁定,然后控制靶标按照给定速度转动。在跟踪状态稳定后,记录方位和俯仰两个方向上的跟踪脱靶量。记录靶标转速分别为40°/s、60°/s、80°/s时预测滤波前后目标跟踪精度,如表2所示。

表2 预测滤波前后室内靶标跟踪精度
靶标转速为40°/s时的跟踪轨迹对比如图11所示。

图11 靶标转速40°/s时跟踪轨迹对比
控制靶标转速为40°/s。当使用原脱靶量进行目标跟踪控制时,方位跟踪精度为3.5688 mrad,俯仰跟踪精度为2.1627 mrad。当使用脱靶量α-β-γ-δ预测滤波值进行目标跟踪控制时,方位跟踪精度为0.6807 mrad,俯仰跟踪精度为0.4182 mrad,跟踪精度大幅提升。
外场跟踪试验主要针对民航飞机进行,目标跟踪轨迹如图12所示。方位跟踪精度为0.1002 mrad,俯仰跟踪精度为0.0339 mrad。

图12 民航飞机跟踪轨迹
从仿真及试验结果可见,使用α-β-γ-δ预测滤波后,对运动目标跟踪平稳,跟踪精度有明显提高,这验证了本文设计的α-β-γ-δ预测滤波算法是有效的,在实际平台嵌入式控制器中可以实现,具有较好的有效性和可行性,能用于实际红外跟踪系统。
5 结束论
本文根据红外跟踪系统的目标跟踪控制原理,针对目标位置脱靶量中的噪声和时滞特性,设计了α-β-γ-δ算法进行目标脱靶量的预测滤波处理,在Matlab Simulink中进行了仿真,并在实际系统中进行了验证。结果表明α-β-γ-δ预测滤波可以较好地抑制脱靶量噪声和滞后对目标跟踪尤其是运动目标跟踪的影响,可以在嵌入式控制器中实现,并能用于实际红外跟踪系统,具备应用价值。
