某型整体组件上电不复位故障分析及排除
2020-04-12马平野
马平野
摘要:介绍了某型整体组件上电复位的原理、过程及相关分部件的功能,详细分析了某台整体组件上电不复位故障的原因,阐述其修理过程,并对整体组件上电不复位这一典型故障进行总结。
关键词:光电雷达;开机不复位;光学—机械组件
Keywords:optical radar;power on without reset;optical-mechanical components
0 前言
某型整体组件主要由电子部件、光学—机械组件、制冷系统和激光测距器组成,其中光学—机械组件包括扫描机构、物镜、放大器、整流罩、角度传感器及其逻辑组件、电机控制组件等。该型整体组件上电后,扫描反射镜应自动回复零位,代表整体组件中的电子部件、光学—机械组件工作基本正常。
在修理中有一类典型故障:整体组件上电后系统不能自动回复零位。产生这一故障的原因是多种多样的,但多发生于光学—机械组件。本文结合一台产品的修理过程,对该组件引起的此类故障进行归纳分析。
1 整体组件工作原理
1.1 复位工作原理
整体组件上电后,自动执行存储于电子部件只读存储器中的复位程序,扫描机构在电子部件的控制下自动回到方位、俯仰坐标零位。这是一个闭环负反馈自动控制系统,控制方块图如图1所示。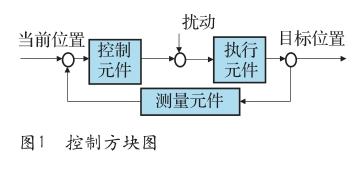
1.2 复位工作过程
复位工作过程经过以下6个步骤:
1)电子部件开机约120ms后,内部信息处理装置自动执行计算机自检程序,该程序主要完成部分寄存器清零、部分译码器检查以及逻辑、算术运算部件的自检等功能。
2)电子部件自检后,将发送3组同步信号和节拍脉冲到光学—机械组件的方位、俯仰、倾斜角度传感器,使这3个角度传感器开始工作。
3)方位、俯仰、倾斜角度传感器将代表当前位置实时角度的格雷码送入电子部件,电子部件进行格雷码到二进制码、串行码到并行码的转换,同时在相应寄存器允许信号的控制下通过内部总线进入信息处理装置。
4)信息处理装置进行目标指示角度为零的计算程序,将方位、俯仰、倾斜3个通道的传动机构控制码通过内部总线输出,其中方位、俯仰通道控制码为8位二进制码,进入系统动态特性校正环节,按照一定的参数对系统动态特性进行校正使之达到最优。
5)校正后的二进制码进入传动机构电机数字控制信号脉宽调节电路,进行调宽码计算。
6)计算好的调宽码输入整体组件传动机构各个电机的电流形成器,控制电机驱动扫描机构回到零位。
2 故障相关组件及其功能
2.1 电子部件
电子部件是整体组件与其上位机进行信息交换和控制整体组件工作状态的核心处理部件。电子部件能够实现整体组件与其上位机之间的信息交换,形成控制扫描机构的工作信号,处理来自上位机和光学—机械组件的信息,控制激光测距器的工作状态,实施整体组件的自检。
2.2 倾斜角度传感器
倾斜角度传感器是一个角度—码的光电变换器,变换器本身是一个12位的位置变换器,其用途是发送关于光电探测装置在倾斜方面0~360°角度范围内的角度位置信息。
2.3 方位、俯仰角度传感器
方位、俯仰角度传感器同样是一个角度—码的光电变换器,不同于倾斜角度传感器,其本身是一个14位的位置变换器,用于发送扫描反射镜在方位和俯仰上的角度位置值。
2.4 倾斜逻辑组件
倾斜逻辑组件接收来自放大器—形成器的信号,并根据信号状况,向发射器输送节拍脉冲的顺序,产品的节拍脉冲和探测脉冲都输入逻辑组件,而关于产品轴的角位置的信息是按这两个通道从逻辑组件向前输送的。逻辑组件还用于产品与电子部件的信息交换。
2.5 方位、俯仰逻辑组件
方位、俯仰逻辑组件由两个多层板和一个装有全部逻辑元件的印刷电路板制成。节拍脉冲和探测脉冲从电子部件进入逻辑组件,而关于整体组件轴角位置的信息是从逻辑组件沿两个高位字节的通道向前发送。逻辑组件用来提供产品工作时所需的十进制算法以及实现与电子部件交联。
2.6 ДМ-10电机
共有三个ДМ-10直流力矩电机,两个固定在扫描机构壳体上,传动比为0.2,用于保证扫描反射镜搜索场方位方向上的运转;一个安装在扫描镜旋转轴上,传动比为0.2,用于保证扫描反射镜搜索场在俯仰方向上的运转。
2.7 ШДА-3电机
共有两个ШДА-3电机,一个为倾斜步进电动机,传动比为1/89,用来控制光电探测器的转动;另一个为光圈步进电动机,传动比为1/56,用来控制光圈机构叶片的散开与收缩。
2.8 步进电机ШД控制组件
步进电机ШД控制组件用于形成步進电动机4个相位上的控制脉冲,步进电动机保证光电探测装置倾斜方向的转动和光圈的旋转。ШД板的电路由两个相同的控制通道构成:倾斜上的(М)和光圈控制上的(Д)。每个通道的控制电路形成控制步进电动机4个相位的正向、反向配电脉冲,当从正向配电转换到反向配电时,发生步进电机的倒转。
2.9 电流形成器
电流形成器是一个桥式功率放大器,其用途是将宽脉冲调制信号转换成控制直流力矩电机ДМ-10的电流。电流形成器是由晶体三极管1НТ251和2ТС622以及功率晶体三极管2Т808А及133系列微型电路制成。
在恒定周期情况下,宽脉冲调制信号相对于u=5V以负脉冲形式输入形成器的两个输入端之一。宽脉冲调制信号两个输入端的存在决定了形成器输出电流的两个方向,即直流力矩电机转动的两个方向。
3 故障原因
同样是不复位,细节现象不同,故障引发原因多有不同。整体组件上电不复位分为以下两种情况。
1)上电后扫描镜静止不动
这种情况发生的原因多为电流形成器故障、步进电机ШД控制组件故障,导致无法供电,相对应的电机无法工作。
2)上电后扫描镜乱动,倾斜、光圈卡滞异响乱动
这种情况发生的原因多为角度值的异常(如角度传感器故障、逻辑组件故障)或供电异常,导致电机无规则运动。
4 故障检查与排除
某台整体组件的故障现象为上电后倾斜机构转动异常。通过串件检测的方法很容易将故障点定位在步进电机ШД控制组件。
4.1 电路原理
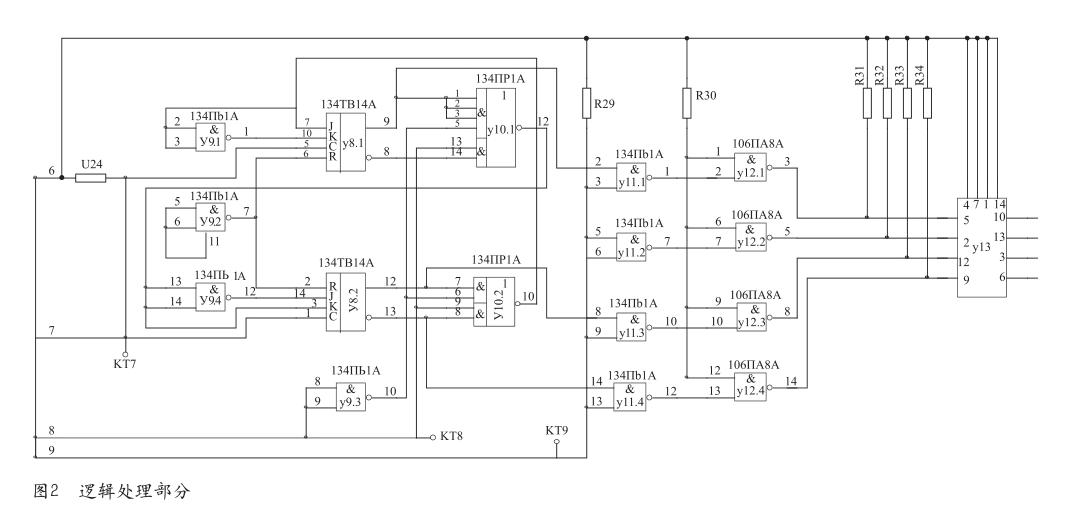
根据电路原理图可知,电机ШД控制组件分为倾斜、光圈两部分,且两部分相同。本次故障为倾斜机构转动异常,因此分析倾斜部分的电路。该电路分为两部分,前部分为逻辑处理部分(见图2),主要由四2输入与非门、双通道JK触发器、三极管阵列等构成;后部分主要为功率放大部分(见图3),主要由大功率三极管、二极管等构成。
4.2 故障检查
首先对逻辑处理部分进行检查。使用直流稳压电源,一路5V接入电机ШД控制组件Ш41插头的13针,对应5V的地接入Ш41插头的20针,使用信号发生器产生频率125Hz、2.5V的信号,接入Ш41插头的15针,对应的地接入Ш41插头的16针。使用示波器对У9芯片(四2输入与非门)、У8芯片(双J-K触发器)、У10(双与或非门)进行测量,逻辑关系正常。继续测量У11、У12(四2输入与非门),输入信号均正常。测量У11的输出信号时的参考信号和采集信号如表1、表2所示,从中可见У11芯片(型号 134ЛВ1А)的8路前级输入信号正常,但4路输出只有1路有信号,输出异常,因此定位为У11芯片故障。
4.3 故障分析
У11芯片(型号134ЛВ1А)为四2输入与非门,共有8路输入、4路输出。若输出只有1路,将使后级电路无法正常工作,无法产生控制步进电机运转的4个相位上的控制脉冲,倾斜无法复位,导致整体组件上电不复位。故障的134ЛВ1А芯片为1990年生产,至今已经使用27年,因此判断为内部电路老化失效,属于偶发故障。
4.4 故障排除
领用新的134ЛВ1А芯片进行更换,恢复步进电机ШД控制组件并装入整体组件,重新用检测设备进行通电检查,整体组件上电后能够复位,性能合格,故障排除。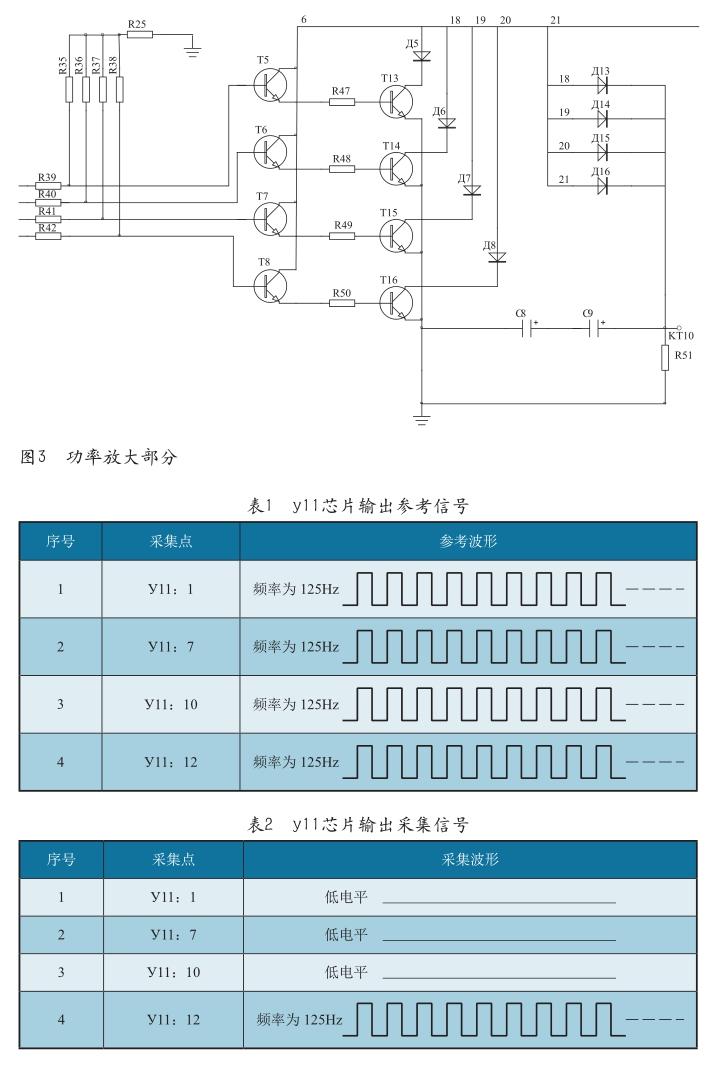
5 维护建议
整体组件上电不复位是一种最常见的故障,但原因却是非常多样的。现在的产品多数已使用20年以上,芯片老化、机械器件磨损现象比较普遍,排故时不必按照原理分析时列出的工作过程查找,应先进行分部件故障定位。同时,也应注意到一些非原理性的細节,如某台不复位的故障件的故障点是其在电子部件与整体组件之间的插针弯折。排故时应遵循由简入难的原则,先确认所有连接关系部分是否有效,以便少走弯路。
参考文献
[1]31Е光电瞄准系统技术使用指南[Z].第2册.
[2]童诗白,等. 模拟电子技术基础[M].北京:高等教育出版社,2006.
[3]蒋立平,等. 数字逻辑电路与系统设计[M].北京:电子工业出版社,2012.
