液压支架电液控制系统的设计与调试
2020-04-12李亚飞
李亚飞
(山西晋煤集团技术研究院有限责任公司,山西 晋城048006)
引言
电液控制系统在煤炭开采工作面液压支架中的应用,是实现煤炭智能开采的关键技术之一,是实现简化流程作业、减轻劳动强度、提高工作效率、提高安全生产的重要方法。煤炭开采工作面液压支架的电液控制系统通过主控元件、传感系统与执行元件之间的数据通讯,完成采煤机位置检测、支护压力检测、自动跟机以及液压支架的成组自动控制、邻架自动控制、本架单动作控制、邻架单动作控制等功能,同时通过储存器和显示器完成数据储存、回放以及远程监控。但目前液压支架的电液控制系统存在可靠性差、同步性差、通讯协议不统一、维修升级困难等问题。本文结合实际工作情况设计一套液压支架的智能控制系统,具体如下。
1 液压支架电液控制总体方案
1)确定整个系统的控制策略,选定传感器、控制器、电源、电磁阀、耦合器等硬件设备,同时给出技术指标。
2)设计硬件连接电路,包括主控制电路、A/D转换电路、信号传输电路、驱动电路、保护电路等。
3)设计控制软件,包括初始化、主程序、子程序、传感器采样程序、开关量控制、模拟量输出等。
2 硬件的选择及其功能
2.1 控制器的选择及其优点
该设计采用C8051F0020芯片作为主要控制元件,是一款高性能处理器,它具有高速处理指令的能力、丰富的中断端口、灵活的可编程计数列阵、多类型串行总线端口以及全速在线调试功能,可以完成复杂工况的智能控制工作。
在煤矿综采工作面施工过程中需要多个液压支架和液压支架组进行有序的动作才能保证开采的高效和安全。首先将支架连接到耦合器,然后通过连接器与交换机相连,再由交换机接入到井下和地面的中央控制主机,从而形成完整的智能控制通讯网络。井下中央控制主机是整个电液控制系统的中枢,通过通讯网络可以接收传感系统采集的信号和参数,然后进行分析处理产生控制信号传输给支架控制器,支架控制器直接对液压支架的电磁先导阀进行控制,在传感系统和控制中心的不断反馈和控制下,支架控制器不断改变各个液压支架上的电磁先导阀的工作状态,从而使液压支架有序完成各种动作[1]。同时液压支架上的传感系统将液压支架的运行参数和受力状态通过信号通讯系统反馈给井下和井上中央控制主机,这些参数的获得不仅可以实时监测液压支架的工作状态,防止事故的发生,也可以让液压支架和刮板运输机、采煤机之间的动作更加协调。
2.2 信号采集系统电路设计
2.2.1 开关量信号
该系统的开关量信号主要有接近开关、保护、急停、闭锁4个种类,其中接近开关和保护是系统运行中根据实际情况自动触发,以保证系统的正常运行,而急停和闭锁开关量的控制由支架控制面板上安装的急停按钮进行控制。该按钮有按下和跳起两个工作状态,按下状态是系统正常工作,此时该开关量输出为低电平,当系统出现支架输出压力不足、卡顿、承压过高等故障或紧急事件时,紧急按钮将自动跳起,输出高电平,同时相应的故障指示灯开始闪烁,方便维修人员尽快处理[2]。
2.2.2 模拟量信号
液压支架电液控制系统的模拟量信号主要包括红外线、压力、超声波和位移等,利用系统安装的各种传感器,对推镏过程中产生的位移、采煤机和液压支架之间的距离、液压立柱收到的压力以及采煤机所在位置进行数据采集。电液控制系统模拟量采集框图如图1所示。
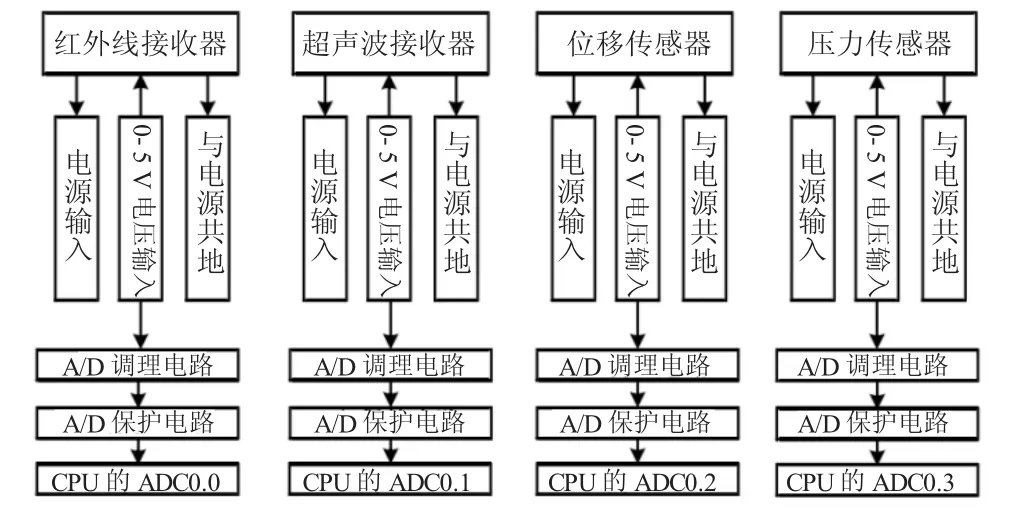
图1 模拟量信号输入框图
3 支架控制器的软件设计
软件是控制系统最为重要的组成部分,只有软件的控制精确无误才能保证系统的高效和安全。该系统主要通过四种工作模式进行软件编写,分别为空闲等待模式、闭锁模式、从控模式和主控模式[3]。
3.1 空闲等待模式
该模式是操作者对系统发出操作命令之前,在没有任何操作和参数输入的情况下,系统自动检索和初始化,液晶显示屏处于默认界面,操作者观察系统的参数值,保证系统运转正常后即可进行按键操作和参数设置。
3.2 闭锁模式
该模式是在出现系统故障或紧急情况下自动触发或通过按下闭锁按钮人工触发,通过上位机或各控制器之间的命令传输都可以进入闭锁模式。该模式一旦触发,控制器不再接受任何操作命令和系统命令,也不会控制液压支架执行任何动作,直至故障维修结束,系统恢复正常,重新恢复闭锁按钮状态。
3.3 从控模式
该模式的触发需要将控制界面的主从控制按钮进行选择更换,该模式下本架控制器根据其他控制器通过通讯系统发来的控制信号进行液压支架的某个动作,或控制本架完成某个特定的功能。该模式触发后只有闭锁按钮能够继续发挥作用,其他操作和控制不会被系统接受。
3.4 主控模式
在无特殊情况发生时,液压支架正常的工作状态在主控模式下进行,在操作界面选择主控模式,液压支架的动作将按照设置好的参数进行工作,此时,除闭锁和急停外不再受其他程序和信号干扰。主控模式的控制程序复杂而精确,必须对外线传感器、压力传感器、超声波传感器和位移传感器发送的信号进行实时采集和分析,精确控制升架、推镏、降架、移架动作,同时协调运输机、采煤机等共同完成采煤作业。
4 系统调试
系统开发完成后需要进行单个液压支架的控制调试、通讯系统调试和整体调试,通过调试确定程序的合理性、系统的稳定性和可靠性以及控制精准性。
4.1 支架控制器与主机通讯测试
由主机操作界面发出控制命令,通过通讯电缆传送给支架控制器,这些命令是否被传送接收,通过二极管实验台的亮暗表现出来,同时主机会接收到液压支架的状态信号,并显示在操作界面上。经过反复操作,在所有条件和状态下验证通讯系统可靠、稳定,满足使用要求。
4.2 单个支架的调试
该过程分别对多个支架进行长时间单体检测,需观察单动作、组动作的完成准确性以及传感系统和控制系统的灵敏性;测试闭锁模式下是否能够停止运行,其他按钮和程序信号是否能够继续控制支架动作[4]。
模拟测试液压支架和采煤机之间的距离控制,用一个小车代替采煤机,放置在距离液压支架约3 m位置,小车以与采煤机相同的速度向前移动,在此条件下观察电液控制系统对液压支架的移动控制是否满足使用条件。
4.3 整体测试
最后的整体测试需要1台井下控制主机、10个支架控制器,以手动优先级高于自动优先级的顺序为准,即在手动操作过程中,不接受自动控制命令。整体测试是综合性的测试过程,在测试过程中通过不断发现问题并进行改进,直到整个程序能够满足所有液压支架现场应用条件,方可把系统安装到现场应用。
5 结语
随着采煤技术的高速发展以及电液控制技术的突飞猛进,煤矿井下作业的无人化、高效化、科技化日渐成效。而煤矿井下环境的复杂多变给煤矿开采的安全和效率造成了很大困扰,这也是开发自动控制系统的主要原因,电液控制技术在液压支架的应用越来越成熟,在控制主机、传感系统、通讯系统、动力系统的配合下,液压支架按照设定的规律进行动作,代替了大量的人工操作,同时通过对液压支架的受力进行检测和监控,使矿压变化一目了然,这给安全生产也提供了有利的保障。
